 介电弹性体软机器人研究:高压放大器的应用实践
介电弹性体软机器人研究:高压放大器的应用实践

实验名称:介电弹性体肌肉制成的受水蛭启发的软机器人研究
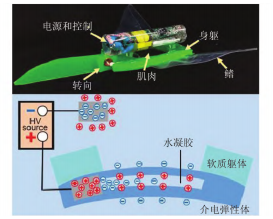
研究方向:水蛭运动的特点是吸盘附着和身体收缩交替,在复杂地形上提供了高度的适应性和稳定性。在此,首次提出了一种受水蛭启发的摩擦电软机器人,能够进行两栖运动、攀爬和负重爬行。开发了一种高性能的摩擦电仿生机器人系统,用于驱动和控制电响应软体机器人。爬行机器人因其对不同环境的特殊适应性而受到了相当大的关注,并应用于环境监测、勘探生物医学和设备检查。尽管许多刚性爬行机器人,包括轮式、跟踪和legged变体,它们能够为精细的操作或重型举重提供精确的控制和高有效载荷能力,它们对由刚性关节组成的复杂机构的依赖限制了它们穿越复杂地形的能力。与刚性机器人相比,软体机器人重量轻、可变形、成本低、材料灵活,并且具有出色的机械柔性。使它们能够模仿无脊椎动物(章鱼、毛虫和蛇在复杂的环境中爬行,包括不平坦或粗糙的表面和狭窄的隧道。
目前,软爬行机器人可以根据它们的激活机制进行分类,包括电、磁、化学、热、光、压力、和湿度。它们根据与外部电源或控制系统的连接进一步分为非系留机器人和系留机器人。无系留机器人以其高机动性和操作灵活性而闻名,广泛用于探索无法进入的区域、执行遥感或执行复杂的任务。最近提出的摩擦电软体机器人有效地解决了高压供电电路故障带来的问题。通过利用摩擦纳米发电机(TENG)的高电压和高阻抗特性,这些系统可以轻松产生数千伏特的低输出电流(≈μA),而无需额外的电路。确保电响应软体机器人的稳定运行。TENG已被证明可以驱动电响应材料,例如液晶、电流变液和介电弹性体,表明TENG为软机器人提供动力的潜力。此外,由于电荷转移量小,使用TENG驱动介电弹性体等材料可降低高电场下薄膜破裂的风险,使其成为软体机器人的理想电源。
实验目的:使用高压电源(Aigtek,ATA-7100,100W)与HDC-TENG(多通道高压输出摩擦纳米发电机(HDC-TENG))进行比较,通过使用力传感器测量DM和TES组件两个关键组件使能)的机械特性来评估驱动电响应软机器人的能力,为后续实验做论证和铺垫。
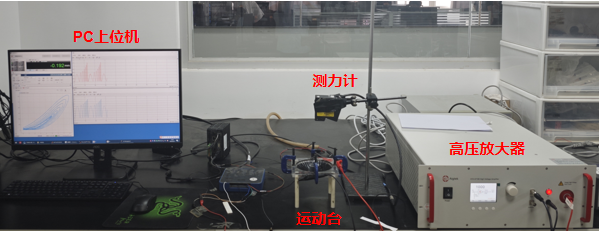
测试设备:ATA-7100高压放大器、信号发生器、示波器、数字源表、陶瓷电阻器、单轴力传感器、激光距离传感器、高速相机、上位机
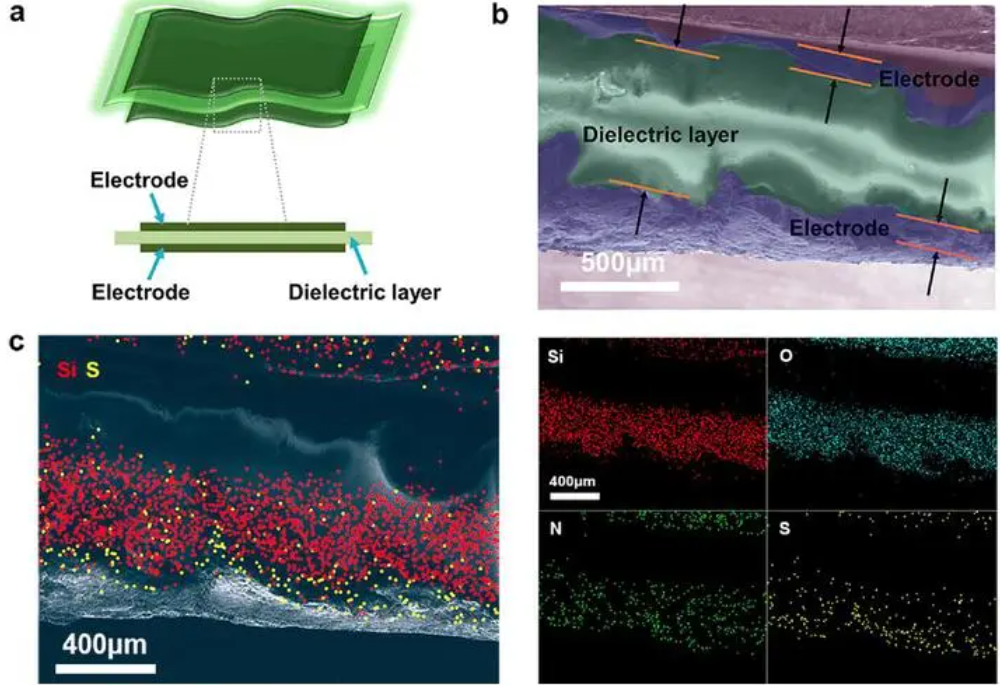
实验过程:利用可变形肌肉和摩擦电吸盘,用于制造可变形肌肉的材料包括介电弹性体、碳润滑脂和PET薄膜,采用静电计、陶瓷电阻器(1MQ~50GΩ)和电阻-电容分压器测量HDC-TENG的开路电压和功率曲线。用数字万用表直接测量了短路电流和转移电荷。使用扫描电子显微镜捕获摩擦材料的显微图像。高压电源(Aigtek,ATA-67110,100W)和信号发生器为DM供电,以便与HDC-TENG进行比较。在精密金属激光切割工作站上加工dm用PET。采用单轴力传感器测量DM的阻塞力和TES的粘附力。采用激光距离传感器(测量DM的突出长度。DM和TES的电容值采用数字源表测定。使用相机连续记录LSR的爬行速度,计算每单位时间爬行的距离。使用MATLAB和Origin进行数据处理和绘图。

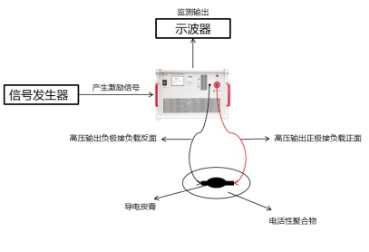
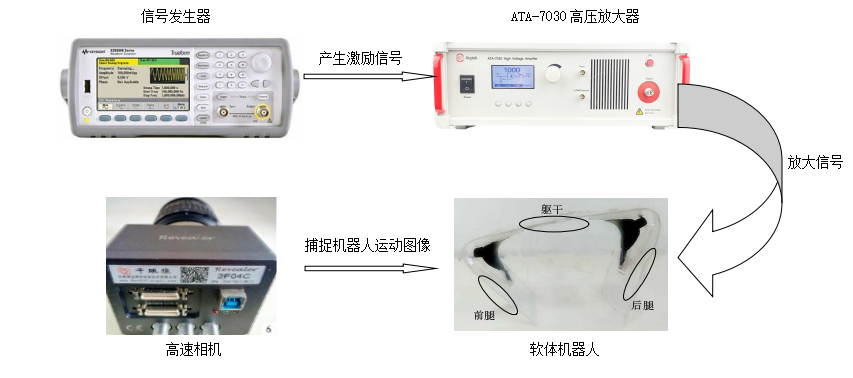
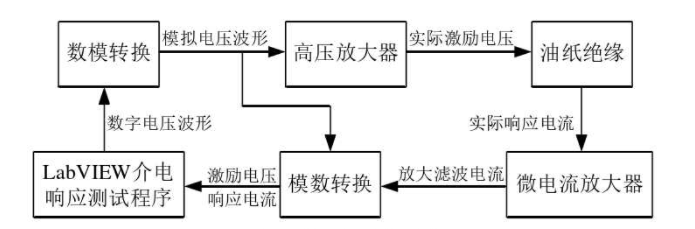
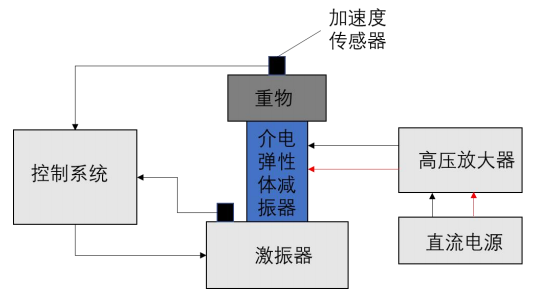
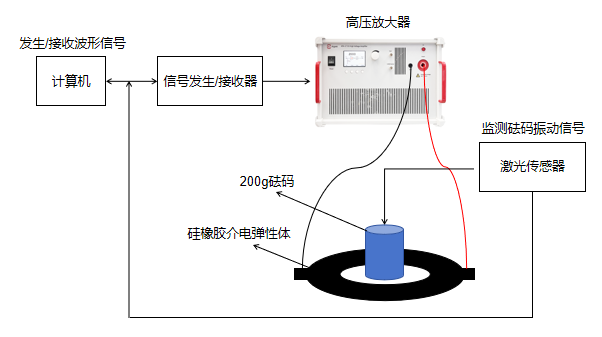
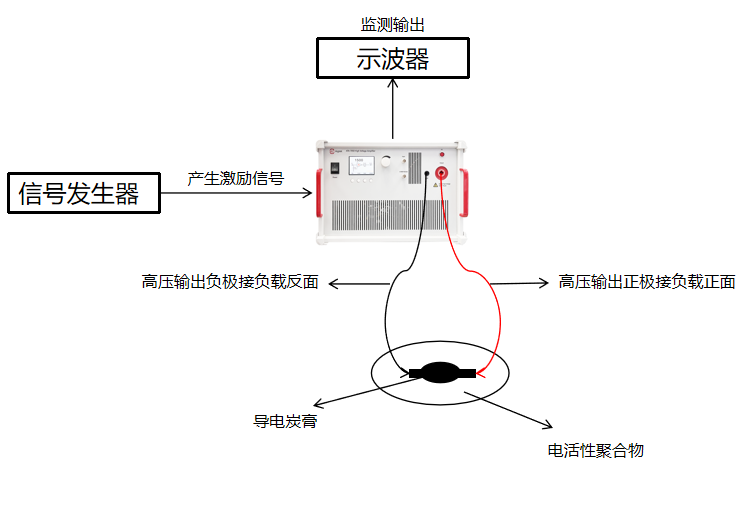
图1介电弹性体肌肉制成的受水蛭启发的软机器人研究实验框图
实验结果:可以通过测量HDC-TENG在各种充电周期内施加到DM的电压来评估HDC-TENG对软致动器的驱动性能(参见图2B)。带有一段DM的软致动器在1s内达到最大饱和电压;两个段在1.5秒内到达它;和2.5秒内的三个段。由于肌肉的1、2和3段的电容值分别为298.49pF、556.38pF和674.91pF,DM段数量的增加会提高软致动器的电容值(由于并联),需要来自HDC-TENG的更多电荷才能达到饱和电压。当HDC-TENG以不同速度旋转时,应用于具有1、2和3个肌肉段(3秒充电周期)的软致动器配置的电压变化。电压增加是由于HDC-TENG在较高转速下增强的电力输出(参见图2B、C),这会影响输送到软致动器的电压和电荷。图2C、D显示了当HDC-TENG以不同转速运行时,软致动器在DM的1、2和3段中(3s充电周期)的阻塞力和突起长度的变化。在240rpm的转速和3s的充电周期下,软致动器的三段、两段和一段DM分别产生83.3mN/11.88mm、60.5mN/8.57mm和35mN/4.32mm的阻塞力和位移。随着可变形肌肉节段的增加,软致动器的阻挡力和位移都会增加。图2E、F显示了软致动器(DM的3段)在3秒充电周期中阻塞力和突出长度的变化,HDC-TENG以240rpm的转速运行。具有三段DM的软致动器在0.5-3s充电循环期间产生最大阻塞力和位移,如下所示:83.3mN/11.88mm、10.59mN/8.57mm、79.8mN/9.71mm、78.06mN/8.24mm、60.06mN/5.38mm和33.7mN/1.57mm。在1秒的充电周期内,软致动器的性能(阻挡力和突出长度)有显着改善。随着充电周期的延长,这种性能增强趋于稳定,与软致动器的电压增长曲线一致(见图2B),突出表明HDC-TENG的输出电荷和软致动器的电容值是DM能否快速变形的决定因素。
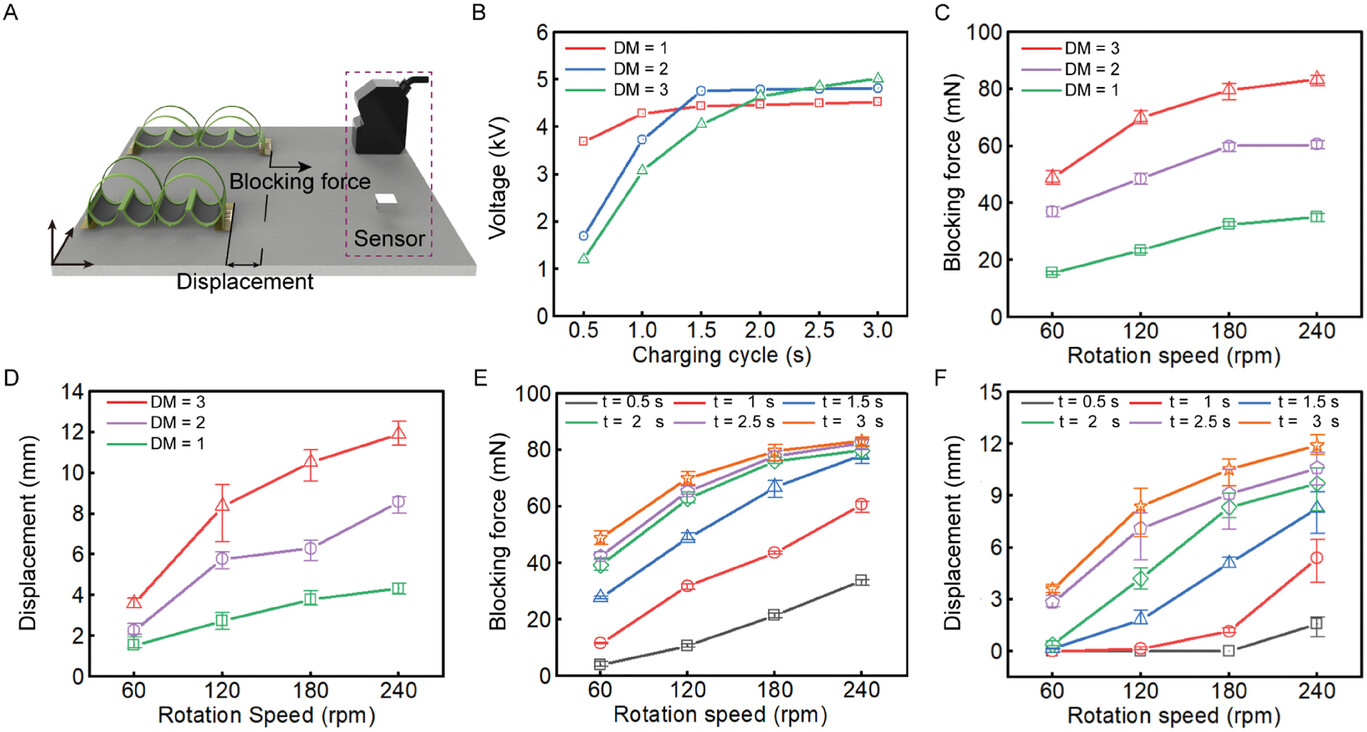
图2生物启发可变形致动器的启动电压、阻断力和突起长度的表征。A)致动器产生的阻挡力和位移示意图。在测量过程中,软致动器的一端固定在基板上,而另一端的阻挡力和位移则使用力和激光传感器测量。B)不同充电周期下DM两端(1、2和3段)的电压。C,D)软致动器(DM的1、2和3段,3s充电循环)在HDC-TENG的不同转速下产生的阻塞力和突起长度。E,F)阻塞力和突起长度由三段DM在不同充电循环中产生。
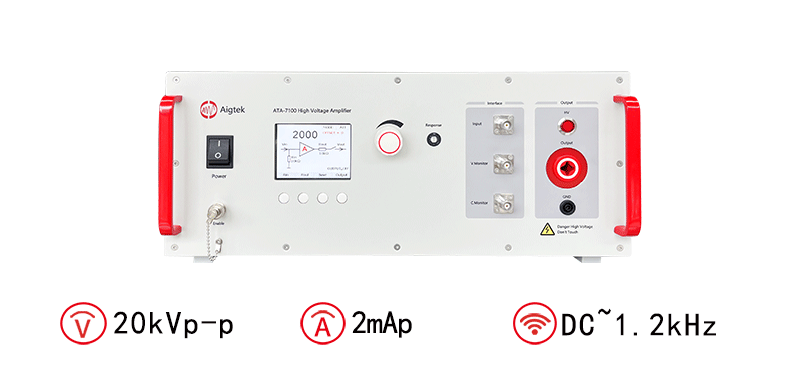
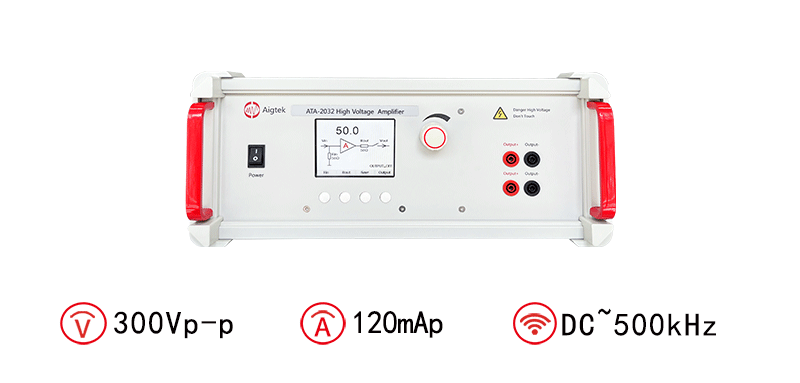
图:ATA-7100高压放大器指标参数
本资料由Aigtek安泰电子整理发布,更多案例及产品详情请持续关注我们。西安安泰电子Aigtek已经成为在业界拥有广泛产品线,且具有相当规模的仪器设备供应商,样机都支持免费试用。
审核编辑 黄宇
-
高压放大器
+关注
关注
4文章
673浏览量
14948
发布评论请先 登录

安泰电子ATA-7030高压放大器在介电领域研究中的应用(合集)
安泰高压放大器在锥形介电弹性体隔振性能验证中的应用
高压放大器在电致动介电弹性体圆柱驱动器中的应用
Aigtek:功率放大器在液晶弹性体上的应用研究
ATA-7050功率放大器经典实验案例—介电弹性体驱动

安泰20kV高压放大器在介电弹性体电致应变测试中的应用
安泰ATA-7000系列高压放大器在介电弹性体驱动实验中的应用
高压放大器在介电弹性体折纸术软体机器人中的应用

安泰ATA-7015高压放大器在机器人测试中的应用研究






 工商网监
工商网监
评论