 高压放大器在介电弹性体折纸术软体机器人中的应用
高压放大器在介电弹性体折纸术软体机器人中的应用

实验名称:柔性驱动器的性能测试
研究方向:机器人的发展史已经超过了100年,机器人也逐渐从复杂笨重,功能单一的传统机器人进化为更为智能、微型且高集成的多功能机器人。而随着科技社会的进步,机器人被赋予了更多使命,但刚性机器人的高度发展无法满足所有应用需求,脆弱的结构与笨重的体型使得它们的应用受到环境的限制。近年来软体机器人的不断发展使得这一劣势足以弥补,为了满足刚性机器人无法触及的应用需求人们将研究的目光逐渐转向软体机器人。
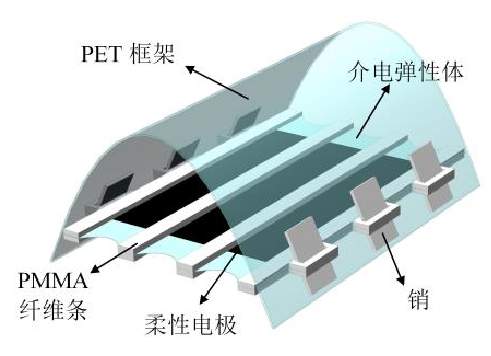
软体机器人在机械和生物医学工程领域正不断凸显其不可替代的优势。它们不仅拥有柔软的身体,还能够根据复杂的物理场景调整身体形状,甚至能以刚性机器人无法做到的运动方式通过非常狭窄的通道。由于身体的柔软性,软体机器人接触尖锐的物体后还不会受到伤害,这一特性使得它们能够进入人体进行药物运输,或者作为医疗手术中的操作员进行临床手术。实际上,柔性驱动器已经作为操纵器被广泛应用于大型机器人的开发中。在具体实践时,为了提高软体机器人在行走、医疗操纵和物体抓取等方面的可操作性,建造具有柔性和可变三维结构的软体机器人至关重要。
实验目的:测试软体材料的性能,通过结构设计和工艺可实现独立电子控制的折纸三维软体机器人、爬行软体机器人以及柔性抓取器等。
测试设备:所需的设备主要包括MC-3020激光切割机(铭创)、亚克力四向拉伸机构、高压电源(Aigtek)、信号源、亚克力固定框等。
实验过程:本实验中需要使用激光切割机(图2-6)制作柔性驱动器和折纸术机器人的PET柔性基板与加强筋,使用激光切割可实现高精度尺寸控制以及高效且平稳的样品制作,通过USB连接电脑进行数据通讯并接收CAD结构图,可方便切割各种形状的基板。
本实验柔性驱动器的制备流程中存在将介电弹性体薄膜四向拉伸的关键步骤,均匀拉伸弹性体薄膜所制作出的器件更具有可靠性。四向拉伸机构使用0.5mm厚的亚克力板材作为基底,通过设计CAD平面结构图(图2-7(a)所示)并导入USB信号通讯端口进行激光切割,最后制作出拉伸机构的基础单元。
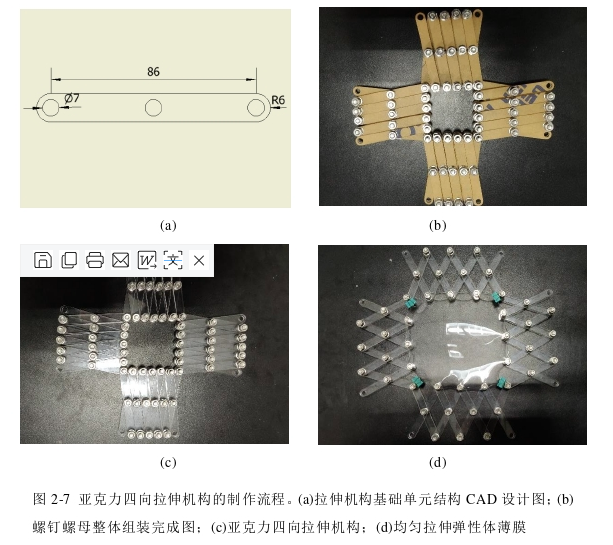
选用合适的螺丝和螺母(M6x20/M6x25)将切割好的亚克力基础单元进行组装,如图2-7(b)所示。组装后的四向拉伸机构可以实现弹性体薄膜的均匀拉伸,其拉伸效果如图2-7(d)所示。
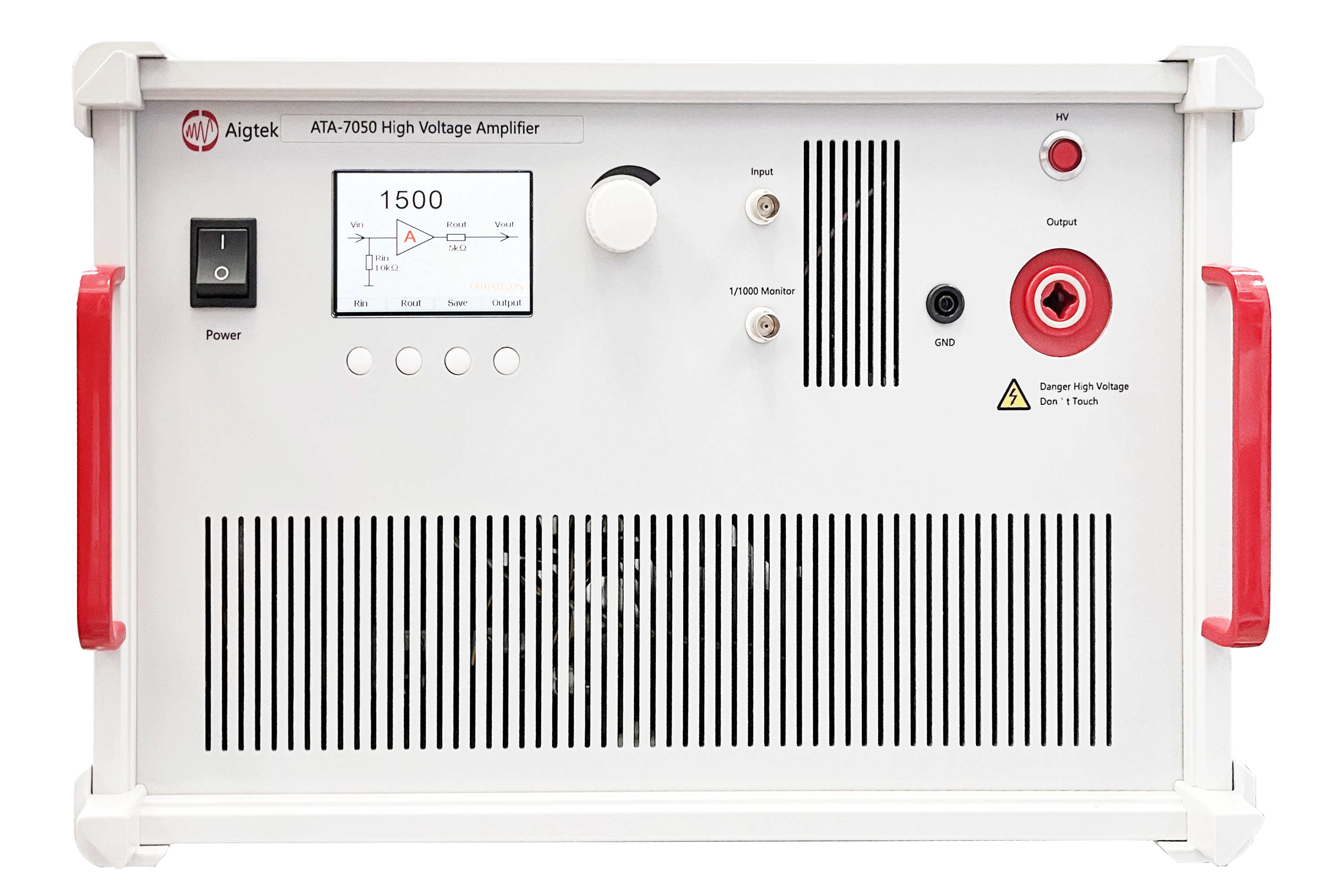
安泰高压电源(图2-8)是一款可高速稳定输出电压的直流电源,可精确控制输出的电压值。其输出电压范围:±5kV,电压精度为1V,输出电流:20mA可以提供实验中所需的高压电。
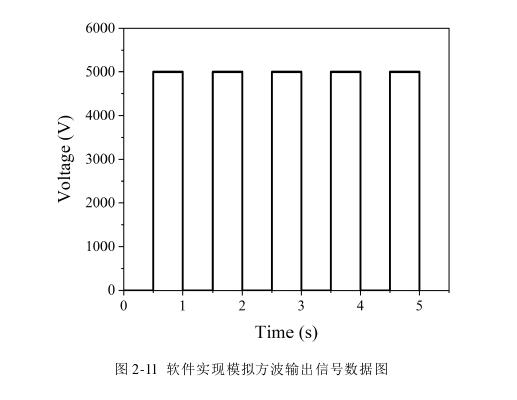
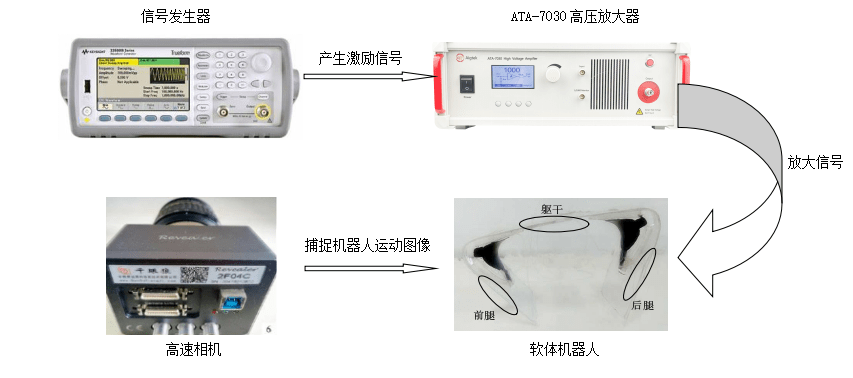
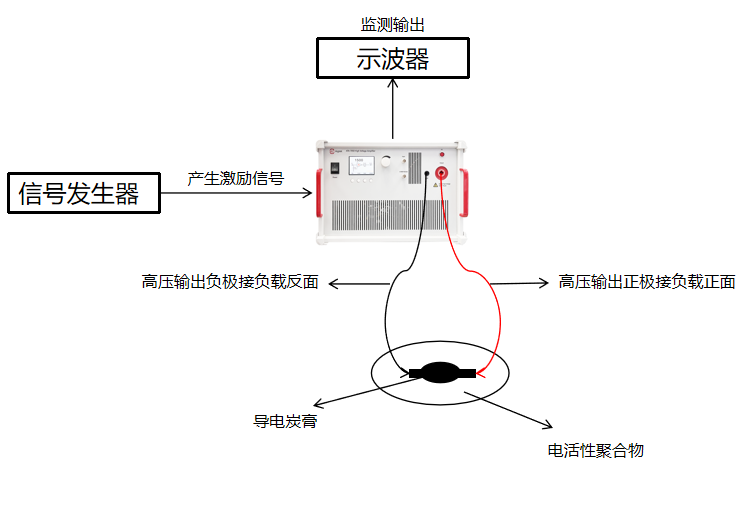
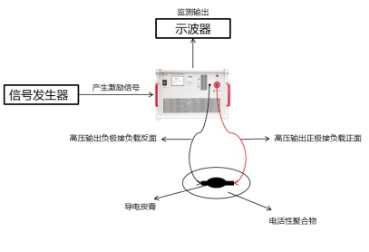
本实验需要一台可提供低频方波信号输出的信号源,根据需求,本实验选择了一台是德科技的信号源,为高压放大器提供一直方波的电压信号,经过高压放大器放大之后,输出高电压。
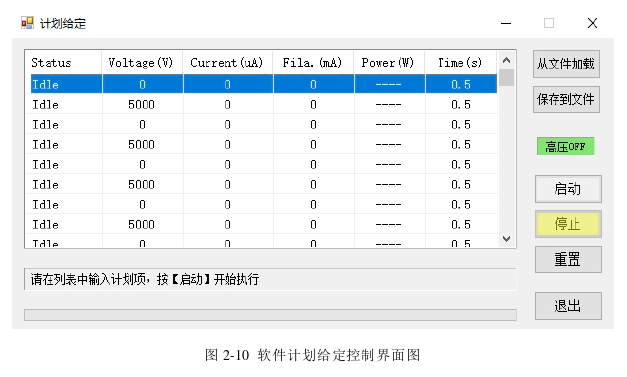
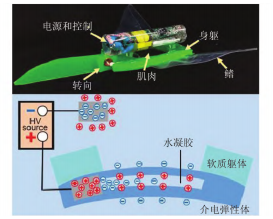
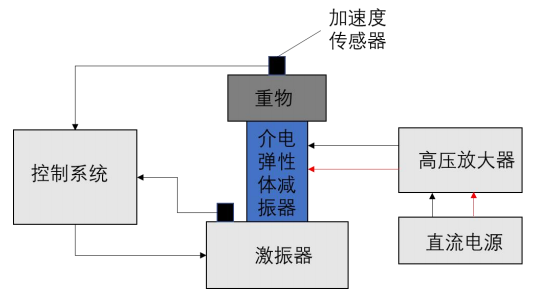
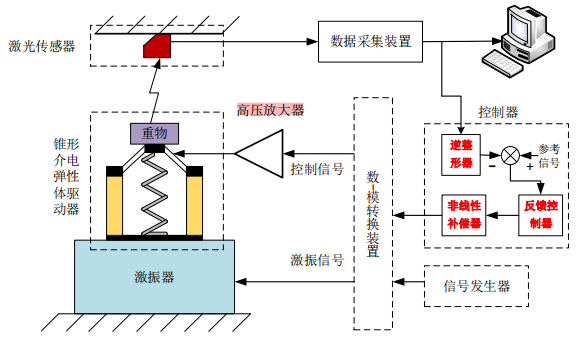
实验结果:根据介电弹性体驱动器的驱动原理可知(随着柔性电极两端电压的增大,相反电荷会在电极表面聚集,当聚集到一定程度时两极表面形成的静电力会相互吸引并挤压中间的弹性体薄膜。由于弹性体体积不变的特性,这种压力会使弹性体薄膜厚度减少且向四周扩张,进而将电能转化为机械能并产生形变效果),介电弹性体产生驱动应变与输出电源的电压值(V)有关,而与电压信号本身的方向无关,所以,即使不是交流电压驱动也能使介电弹性体驱动器产生周期应变,然而受到串口通讯速度的限制,该设备的最高频率仅为10HZ,电压输出范围:0~5kV。
高压放大器推荐:ATA-7050
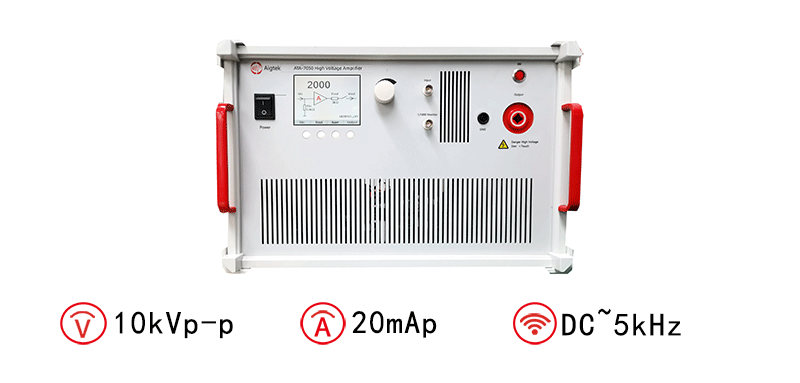
图:ATA-7050高压放大器指标参数
本文实验素材由西安安泰电子整理发布,西安安泰电子科技有限公司(Aigtek)是国内专业从事测量仪器研发、生产和销售的高科技企业。公司致力于功率放大器、功率信号源、功率放大模块、计量校准产品等产品为核心的相关行业测试解决方案的研究,为用户提供具有竞争力的测试方案,Aigtek已经成为在业界拥有广泛产品线,且具有相当规模的仪器设备供应商,样机都支持免费试用。
-
测试
+关注
关注
8文章
5740浏览量
129168 -
机器人
+关注
关注
213文章
29835浏览量
213730 -
高压放大器
+关注
关注
4文章
663浏览量
14913
发布评论请先 登录
高压放大器基于介电弹性体最小能量结构设计应用

Aigtek:介电弹性体高压放大器在软体机器人研究中的应用

安泰ATA-7000系列高压放大器在介电弹性体驱动实验中的应用
安泰高压放大器在锥形介电弹性体隔振性能验证中的应用
高压放大器驱动介电弹性体可以做哪些实验






 工商网监
工商网监
评论