 自动驾驶中常提的RTK是个啥?
自动驾驶中常提的RTK是个啥?

[首发于智驾最前沿微信公众号]在谈及自动驾驶关键技术时,经常会听到一个技术,那就是RTK,很多人看到RTK后一定会想,这到底是个啥技术?为啥这个技术很少在发布会上看到,但对于自动驾驶来说却非常关键?今天智驾最前沿就和大家聊聊什么是RTK。
先说一说RTK是个啥。RTK(Real Time Kinematic,实时动态定位)是一种基于差分载波相位观测的高精度卫星定位技术。简单理解就是,通过一台固定不动、坐标已知的基准站持续接收来自全球导航卫星系统(GNSS)的信号,实时计算出误差改正量,并将这些改正信息发送给流动站(rover)。流动站结合自身接收到的卫星载波相位和伪距数据,对定位结果进行校正,从而实现厘米级甚至亚厘米级的实时定位。这一定位精度水平,使得RTK在自动驾驶、无人机测绘、工程建设等对高精度定位要求极高的领域中发挥着不可替代的作用。

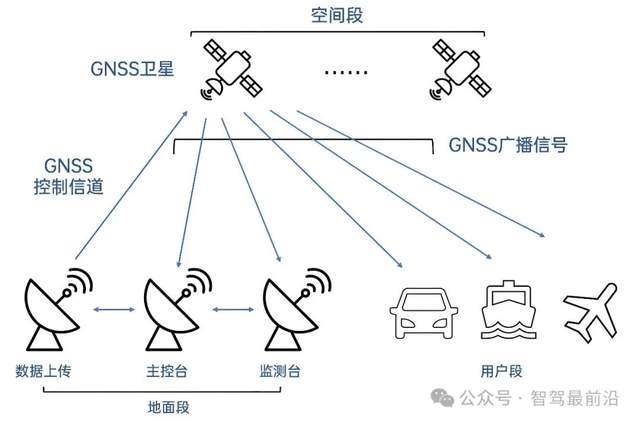
要理解RTK的优势与原理,首先需要知道GNSS单点定位的基本流程。GNSS卫星通过不断广播卫星轨道和精确时间信息,接收机测量信号传播时间以获得与卫星之间的伪距,通过同时观测多颗卫星并进行多边定位,就能计算出用户的三维坐标。这样测出来的信号在传播过程中会受到电离层折射、中性层延迟、卫星钟差、轨道误差以及接收机本身的硬件偏差等因素影响,使得单点定位的精度通常只能达到米级。对于自动驾驶车辆而言,这样的误差范围远不能满足车道级或车辆间距控制的需求。
传统差分定位(DGPS)利用一台基准站测算自身伪距观测与已知真实坐标之间的偏差,将偏差值作为改正量实时传送给流动站,从而将定位精度提高到米级以内。尽管DGPS能显著提升定位精度,但要追求厘米级的定位效果,必须依赖更高精度的载波相位观测。GNSS信号的载波频率极高,其波长通常在十几到二十多厘米之间。RTK技术正是利用这段极短波长进行测量,通过对基准站和流动站的载波相位观测值进行双差处理,能够消除绝大多数公共误差项,仅剩下微米级别的随机误差,最终实现厘米级甚至亚厘米级的定位精度。
在实际系统中,实现RTK定位必须解决三个关键技术难题。第一个是载波相位双差观测的实施。双差处理涉及到先对基准站和流动站分别进行单差,以消除卫星钟差和接收机钟差,再在基准站—流动站之间进行二次差分,以剔除大气误差和轨道误差。这样一来,观测值中的主要系统误差被大幅度抑制,只剩下可以认为是白噪声的随机误差分量。第二个是整数模糊度解算问题。载波相位观测只能提供相位连续变化量,而每次接收时载波的整周数(模糊度)并不直接可知。RTK系统需采用诸如LAMBDA(Least-squares AMBiguity Decorrelation Adjustment)等算法,通过多遍观测和统计方法,在极短的时间内求解出整数模糊度,并将其固定,从而保证相位测量的完整性与精度。第三个是实时通信链路的设计。由于差分改正信息对实时性要求极高,一般需要保持端到端时延低于100毫秒,才能避免定位精度随延迟而迅速退化。因此,基准站与流动站之间通常通过4G/5G网络、专用无线电链路或局域网等多种方式构建低延迟、可靠性高的通信通道。
在自动驾驶系统中,RTK常与惯性测量单元(IMU)以及其他传感器如激光雷达、视觉里程计、车轮里程计等深度融合,形成一个鲁棒的多传感器融合定位方案。基于卡尔曼滤波或其扩展形式的融合算法,可在GNSS信号短暂丢失或多路径效应严重时,利用IMU提供的高频加速度和角速度数据进行短时预测,保证定位的连续性与稳定性。当RTK恢复可用后,融合算法又能及时修正长期漂移,为车辆提供既具高精度又具高可靠性的位姿信息。通过这种互补式设计,自动驾驶车辆能够在高速公路、城市道路、隧道及复杂交叉口等多种场景下,始终保持对自身位置和航向的精准把握。
对于自动驾驶平台的设计与部署而言,RTK系统的选型与安装也有许多细节需要关注。基准站的安装位置应尽量选择开阔无遮挡之处,以最大限度减少天线信号的遮挡与多路径反射;基准站的坐标要通过长时间静态观测或高精度测量方式获得,确保其已知位置的精度优于一厘米;流动站天线通常安装在车辆车顶中央位置,以获得更广阔的天空视野,同时要考虑防水、防震及电磁兼容等车规级要求。此外,基准站与流动站之间的通信链路需要经过带宽、时延、丢包率等多项指标测试,以保证改正信息在任何工况下都能稳定、及时地传达到流动站。
随着网络化RTK服务(NRTK)的兴起,用户无需自行建设基准站,也能通过互联网接入已有的基准站网络,获得高精度差分改正服务。NRTK服务商通常在云端集中管理数十至数百个分布在不同地点的基准站,利用虚拟参考站(VRS)、主从差分(MAC)等网状差分技术,生成覆盖更大区域且更高精度的改正数据流。用户只需在流动站中配置相应的网络参数,便可实现即插即用式的厘米级定位,大大降低了系统部署与维护成本。这一模式在无人驾驶车辆大规模商业化部署过程中,正逐渐成为主流选择。
尽管RTK技术在精度与实时性方面具有显著优势,但其在特定环境下的仍旧有很多问题。高楼林立的城市峡谷中,卫星信号的多路径反射会导致相位观测值出现剧烈波动,甚至出现失锁现象;在隧道、地下车库、密林等遮挡严重的场所,GNSS信号强度下降,RTK无法工作;当基准站与流动站之间的距离(基线长度)过长时,双差观测中无法完全消除的空间相关误差也会影响定位精度。针对这些问题,行业也提出了多种补偿策略,如结合视觉SLAM(Simultaneous Localizationand Mapping)技术,在复杂场景下利用摄像头构建局部地图并辅助定位;采用多基准站网RTK,提高基准网的密度与覆盖;引入PPP-RTK(Precis ePoint Positioning RTK),将精密单点定位技术与RTK相结合,以进一步提升长基线环境下的定位性能。
在很多L4/L5自动驾驶示范项目中,RTK已广泛应用于高速编队行驶、城市复杂路口通行、精准泊车等各类关键场景。在高速公路编队场景下,车辆通过RTK保持厘米级的车间距和横向偏差,使得列队行驶更加平顺与节能;在城市复杂交叉口场景中,RTK与高清地图结合,能够精准匹配车辆当前位姿与道路要素,提高交叉口放行效率与安全性;在精细化泊车场景中,RTK为车辆提供厘米级的泊车位置参考,再辅以视觉与超声波传感器,实现毫厘之差的泊入。
随着5G通信商用、边缘计算节点的建设以及AI算法在定位滤波中的应用不断深入,RTK在自动驾驶中的角色将更加多元。路侧单元(RSU)可以作为本地基准站并承担改正数据分发,将高精度定位服务下沉到城市级基础设施;车端集成的多频多星座高灵敏天线与FPGA/GPU处理模块能够在信号复杂的环境中保持快速解算和高可用性;基于深度学习的异常观测检测与自适应滤波技术,可在多路径与遮挡条件下智能识别并剔除异常数据,进一步提高定位稳健性。
总而言之,RTK并非单一技术,而是一套从载波相位观测、双差处理、模糊度解算、实时通信,到多传感器融合的一体化高精度定位解决方案。它通过将GNSS系统的系统误差压缩到毫米级,并结合低延迟网络传输,为自动驾驶车辆提供了必不可少的厘米级绝对定位能力。随着网络化服务、边缘计算与AI技术的不断发展,RTK将在精度、可用性和易用性方面持续革新,为无人驾驶汽车的安全、高效与智能化发展注入强大动力。
审核编辑 黄宇
-
RTK
+关注
关注
8文章
161浏览量
38297 -
自动驾驶
+关注
关注
790文章
14393浏览量
171423
发布评论请先 登录
自动驾驶中常提的硬件在环是个啥?
自动驾驶中常提的“先验数据”是个啥?主要用在哪些方面?
自动驾驶中常提的惯性导航系统是个啥?可以不用吗?

自动驾驶中常提的“时序”是个啥?有啥作用?
自动驾驶中常提的高精度地图是个啥?有何审查要求?

自动驾驶中常提的世界模型是个啥?

自动驾驶中常提的HMI是个啥?
自动驾驶中常提的“点云”是个啥?

自动驾驶行业常提的高阶智驾是个啥?

自动驾驶中常提的“NOA”是个啥?

自动驾驶大模型中常提的Token是个啥?对自动驾驶有何影响?
自动驾驶行业中的Tier1与Tier2是个啥?有何区别?
自动驾驶中常提的鲁棒性是个啥?

自动驾驶中常提的SLAM到底是个啥?

自动驾驶中一直说的BEV+Transformer到底是个啥?






 工商网监
工商网监
评论