 自动驾驶汽车如何正确进行道路识别?
自动驾驶汽车如何正确进行道路识别?

[首发于智驾最前沿微信公众号]自动驾驶汽车在行驶过程中必须准确识别道路环境,以便做出安全有效的决策,不同于人类开车,可以思考,自动驾驶汽车对于道路的识别需要更多的技术辅助。对于自动驾驶汽车来说,道路识别不仅仅是简单地判断车辆是否在车道中心行驶,更涉及到对车道线、交通标志、道路边缘以及其他道路要素的综合感知与理解。

传感器硬件
传感器硬件是自动驾驶道路识别的基础,当前主流的传感器包括摄像头、激光雷达(LiDAR)、毫米波雷达,以及惯性测量单元(IMU)和高精度全球导航卫星系统(GNSS)。摄像头可以获取高分辨率的光学图像,用于车道线、交通标志和交通信号灯的视觉识别;激光雷达则能够获取环境的三维点云数据,描绘出周围物体和道路表面的精确几何形态;毫米波雷达擅长在恶劣天气或灰尘、雨雪等视觉被遮挡的条件下检测前方障碍物和道路边缘;IMU和GNSS则为车辆提供精确的姿态与绝对位置。

各类传感器各有优势,但也都有自身局限,摄像头容易受强光照影响而产生眩光,激光雷达在大雨或大雾天气中点云质量会下降,毫米波雷达的角度分辨率相对较低。为了克服各自弱点,实现对道路环境的全面感知,自动驾驶系统通常采用多传感器融合的方式,将不同类型的传感数据在时间和空间上进行对齐和融合。融合的第一步是传感器的空间标定,包括摄像头内外参、LiDAR与车辆坐标系之间的外参、毫米波雷达与其他传感器之间的对齐关系等。只有在精确标定的前提下,才能保证各传感器采集的数据在同一坐标系下无缝拼接,从而为后续感知算法提供可靠的基础。

感知算法
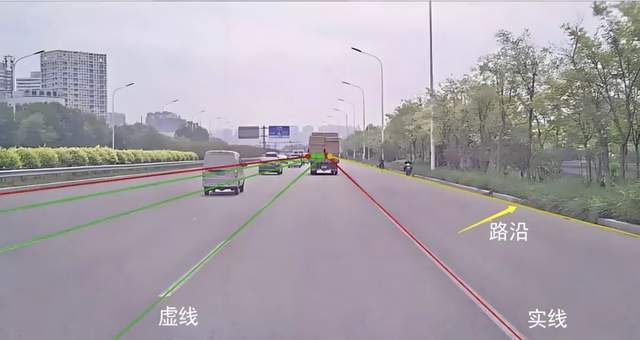
感知算法是道路识别的核心内容。以摄像头为例,常见的道路识别子任务包括车道线检测、语义分割与实例分割、交通标志与交通信号灯识别。车道线检测往往需要对图像进行预处理,如去畸变、色彩空间转换、边缘检测等,然后基于深度学习的卷积神经网络(Convolutional Neural Network,CNN)进行特征提取与端到端预测。典型的方法包括使用全卷积网络(FCN)进行车道语义分割,将图像中属于车道线的像素区域分割出来,再结合图像投影至鸟瞰视角(IPM,Inverse Perspective Mapping)技术,对分割结果进行几何校正,以便获取车道线在车辆坐标系下的真实位置。另有基于霍夫变换或曲线拟合的方法,通过对边缘信息进行霍夫直线或霍夫曲线检测,提取车道线位置,但这种方法对图像质量依赖较强,常在光照不佳时出现误检或漏检。相比之下,基于深度学习的端到端车道检测模型(如SCNN、ENet-Lane等)能够更好地兼顾复杂场景下的泛化能力,但对大量标注数据和训练资源要求较高。
对于道路表面及障碍物的三维感知,激光雷达是最重要的传感器。激光雷达在旋转或固态扫描方式下对周围空间进行快速采样,得到一系列三维点云。点云数据经过滤波、下采样与聚类等预处理后,可以利用基于图卷积网络(GCN)、PointNet等深度学习框架进行语义分割,将点云中的道路、路缘、车辆、行人、树木等类别区分开来。在道路识别的过程中,首先需要对点云进行地面分割,将驾驶可通行区域与非通行区域区分。可以通过地面分割算法(如基于高程阈值的RANSAC拟合)、基于深度学习的地面检测模型(如PointNet系列)等方式,将道路地面点与其他点分离。接着,对剩余点云进行障碍物检测和聚类,将障碍物点分为不同的实例对象,便于后续跟踪与路径规划。为了提取道路边缘信息,可以结合车辆前方区域的点云数据,通过提取点云中地面与突出物体分界处的跳变点,在局部范围内拟合道路边缘曲线。对于复杂城市场景,还需要对道路交叉口、转弯斜坡等特征进行判别,对点云中投影到鸟瞰视角下的点密度分布进行聚类与曲线拟合,以便提取多条车道之间的几何关系。
毫米波雷达尽管点云分辨率低,但对于动态障碍物检测具有天然优势。毫米波雷达通过发送电磁波并测量其回波信号的多普勒频移与延时,可以直接计算出目标物体的距离、角度和速度向量。因此,在高速行驶或高速公路场景下,毫米波雷达能够在远距离(通常在150米以上)可靠地探测到车辆、摩托车等移动目标,为道路识别提供早期预警。毫米波雷达输出的点云往往与激光雷达的点云进行融合,在混合模型中权衡精度与实时性。在车辆即将进入弯道或遇到前方紧急制动时,毫米波雷达的快速预警可以提前触发紧急制动决策,而激光雷达负责地图级别的精细化建模与周围环境轮廓提取。为了实现跨传感器的数据融合,常见做法是采用卡尔曼滤波或扩展卡尔曼滤波(EKF)、无迹卡尔曼滤波(UKF)等方法对多源信息进行状态估计,通过状态空间模型将摄像头与激光雷达的检测结果不断校正,得到更稳定可信的道路信息。

高清地图与精准定位
在感知算法之外,高清地图(HD Map)与精准定位是确保道路识别准确性的关键环节。高清地图一般包含车道线中心线、分割线、道路曲率、坡度、交叉口入口、交通标志、交通信号灯位置等高精度地理信息,并且这些信息往往精确到厘米级。自动驾驶系统在感知到周围环境要素后,还需要将实时感知数据与高清地图进行匹配,以校正车辆当前所在车道、弯道半径、道路拓扑结构等信息。定位技术通常采用视觉里程计(VO)、激光雷达里程计(LOAM)、惯性导航系统(INS)与GNSS相结合的方案。具体而言,车辆搭载的IMU可以提供高频率的加速度与角速度数据,将其与GNSS输出的绝对位置结合,通过紧耦合或松耦合姿态解算,获得初步的车辆定位。与此同时,摄像头或激光雷达对周围环境进行扫描,提取匹配特征点(如建筑物角点、道路标志、车道线),并与预先构建的HD Map进行匹配定位(例如使用基于光学特征的视觉定位算法,或基于点云配准的ICP算法),进一步修正GNSS/INS定位误差,使得车辆在地图坐标系下的横向和纵向误差控制在10厘米以内。只有定位达到足够精度,系统才能正确判断车辆所在车道与道路几何形态,从而为后续路径规划与决策提供可靠依据。

模型训练与验证
针对道路语义识别的深度学习模型,需要进行大量高质量数据的采集与标注,并在多样化场景中不断迭代训练,以提高模型在复杂天气、光照变化以及道路破损等极端情况下的鲁棒性。
在数据采集端,除了白天、晴天环境外,还需覆盖夜间、雨天、雾天、积雪等多种工况,这样训练出的模型才能在真实道路中准确分辨车道线、路面纹理与标志。数据标注环节通常需要专业标注团队,针对车道线标注多种样式(实线、虚线、双黄线等),同时对交通标志进行精细分类(限速、禁行、通过、指示等)。为了进一步增强模型的泛化能力,研究人员还会使用数据增强技术,例如图像旋转、平移、色彩扰动、随机遮挡等;对于点云数据,则可进行随机下采样、点云噪声注入和局部几何变形等操作。训练阶段多采用交叉熵损失或Dice损失等多任务损失函数,对语义分割与实例分割任务进行联合优化。此外,考虑到自动驾驶系统在部署阶段的实时性需求,模型必须经过轻量化剪枝(Pruning)、量化(Quantization)和知识蒸馏(Knowledge Distillation),将原始大型网络压缩到能够在车载计算单元(如NVIDIA DRIVE、Mobileye EyeQ、Tesla Dojo等)实时运行的尺寸,同时保证推理速度能够满足10毫秒以内的实时识别要求。
在算法模型训练与验证之外,系统级的测试与验证同样重要。自动驾驶道路识别系统必须经过仿真测试和实车测试的双重考验。仿真平台一般使用CarSim、PreScan、LGSVL等仿真软件构建虚拟路网,包括高速公路、市区道路、乡村道路、隧道以及各种交叉口等。仿真能够覆盖常规场景与极端工况,例如突发性障碍物、大风沙、暴雨、大雪等场景,通过大量实验验证算法对车道偏离、路面污损等情况的适应性。仿真测试得到的数据与实际道路数据一起用于模型评估,从而评估感知算法在不同环境下的性能指标:召回率(Recall)、精确率(Precision)、IoU(Intersection over Union)等。如果仿真结果未达到指标阈值,需要对模型进行迭代改进并重新验证。实车测试则将车辆部署到封闭测试场地或实际道路中,观察系统在复杂交通流、行人交叉、动态阴影、路边停靠车辆等真实场景下的表现。测试过程中需严格执行测试用例,记录系统在不同场景下的感知准确性、延迟、失真、误报率等关键指标。只有在仿真与实车测试均通过之后,系统才能进入预量产或量产阶段。

系统冗余与健康监测
确保道路识别信息的准确性还需要冗余与健康监测机制。冗余设计的核心思想是让系统在单一传感器或算法失效时,依然能够维持对道路环境的基本感知。具体做法包括多套摄像头组成环视系统,分别负责前向、侧向和后向的图像采集;双激光雷达配置互为备用,若某一路径的激光雷达出现故障,另一组雷达仍能提供关键的点云信息;毫米波雷达与摄像头的融合在于,摄像头负责细粒度的线型识别,毫米波雷达负责距离与速度预估,这种多传感器互补在雨雪雾等视觉受限场合格外重要。算法层面则会设计多路感知算法并行运行,例如独立的视觉车道检测网络与基于点云的车道线拟合算法并行,双方各自得出车道边缘结果后再进行一致性校验。若算法A与算法B的车道预测在横向偏差小于一定阈值,则以加权平均的方式输出;若出现较大分歧,则触发监测报警,提示系统处于不可靠状态,并进入安全降级策略(如减速、保持车道行驶或报警人工接管)。
传感器与算法的在线健康监测也同样重要。以摄像头为例,系统会实时监测摄像头图像的亮度直方图分布,对饱和度、对比度和锐度进行统计分析;若发现图像过暗或过曝、对比度极度偏低,则判定摄像头可能被遮挡或故障,触发重新标定或系统报警。激光雷达则会根据激光反射强度分布与点云密度进行健康判断,若发现某一区域点云突然锐减或存在大量孤立点,可能意味着激光雷达镜面被遮挡或出现偏差,需要及时校正。毫米波雷达的信号质量则通过回波信噪比(SNR)与相位噪声等指标进行在线监测,一旦检测到异常噪声或信号丢失,也会触发系统提示。算法层面,可以通过对比模型输出与历史轨迹数据进行一致性检验,例如历史车道边界曲线应具有一定连续性,当检测结果出现突变时,说明模型在当前场景下可能失效,此时系统也会选择临时降级或人工接管。

实时计算与持续迭代
在确保识别准确性的同时,还需要关注实时性和计算性能。自动驾驶系统通常采用高性能嵌入式平台,如NVIDIA DRIVE AGX Xavier、NVIDIA Orin、Mobileye EyeQ5、Qualcomm Snapdragon Ride等。这些平台集成了GPU、DSP、FPGA等异构计算单元,能够同时满足深度学习推理、点云处理与路径规划等多个计算密集型任务的并行需求。为了保证实时性,感知算法需要采用流水线架构,图像捕获后先由前端预处理(去畸变、色彩校正),随后进入神经网络加速单元进行特征提取与分类,最后再与激光雷达点云数据进行融合与后处理。各模块之间的输入输出数据通过共享内存或高速总线交换,尽量减少数据复制与总线延迟。另外,在算法设计过程中,也要注意模型推理延迟与内存占用之间的权衡,通过结构化剪枝、权重量化以及模型压缩等手段,将模型体积缩减到几十兆字节以内,以便在嵌入式设备上运行时能够维持10–20毫秒的推理时延。这种实时性要求不仅是对识别准确性的补充,也直接关系到行驶安全:如果算法延迟过高,就无法及时响应环境变化,容易导致感知失真与控制滞后。
自动驾驶道路识别系统的持续迭代与生命周期管理也非常关键。在自动驾驶系统上线初期,车辆会在有限的地图区域和预定义路段进行封闭验证,一段时间后逐步扩大测试范围,进入半开放道路测试。测试期间,系统会不断采集真实行驶数据,将路上出现的新类型场景(如新型施工路段、临时交通标志、非机动车临时停放等)加入到数据集中,再次进行离线训练与迭代升级。OTA(Over-The-Air)升级机制确保每辆车在新增功能或优化模型发布后,可以在较短时间内完成软件更新。此外,自动驾驶系统提供商还会建立冗余决策监控平台,持续收集车辆端的感知日志、算法推理日志和传感器原始数据,一旦检测到道路识别出现大规模误判或异常情况,就会立即触发安全警示与召回策略。为了避免OTA升级引发意外风险,每次升级会先在少量试点车辆中进行灰度推送,观察系统在实际道路上的稳定性与可靠性指标,确认没有重大问题后才会向全量车辆推送更新。

最后的话
自动驾驶汽车进行道路识别是一个集传感器硬件、感知算法、数据融合、高清地图与精准定位、模型训练与验证、系统冗余与健康监测,以及实时计算与持续迭代于一体的复杂系统工程。传感器提供原始数据,并通过精确标定与对齐,为算法处理打下基础;计算机视觉和深度学习算法在二维图像和三维点云中提取道路车道、标志标线和障碍物等信息;多传感器融合与高清地图匹配进一步提升识别的空间精度;在线健康监测、冗余设计和系统级验证则确保道路识别在异常场景下保持稳定可靠;高性能嵌入式平台与流水线式计算架构保证实时性;而持续的仿真测试、实车试验与OTA升级,构建了一个动态闭环的迭代机制,使得道路识别能力能够不断进化。通过这一系列技术手段的有机结合,自动驾驶系统才能在千变万化的道路环境中准确识别车道与周围要素,为最终实现安全、高效的自动驾驶奠定坚实基础。
-
道路识别
+关注
关注
0文章
4浏览量
6681 -
感知系统
+关注
关注
1文章
80浏览量
16235 -
自动驾驶
+关注
关注
790文章
14363浏览量
171115 -
汽车
+关注
关注
15文章
3882浏览量
39663
发布评论请先 登录
自动驾驶汽车是如何准确定位的?

卡车、矿车的自动驾驶和乘用车的自动驾驶在技术要求上有何不同?

自动驾驶安全基石:ODD
《汽车驾驶自动化分级》会更适合中国自动驾驶发展吗?

百度最新消息:萝卜快跑在港自动驾驶测试区再扩大 百度智能云持续领跑中国大模型


NVIDIA Halos自动驾驶汽车安全系统发布
理想汽车推出全新自动驾驶架构
自动驾驶的未来 - 了解如何无缝、可靠地完成驾驶

MEMS技术在自动驾驶汽车中的应用
基于改进ResNet50网络的自动驾驶场景天气识别算法







 工商网监
工商网监
评论