 一步到位,Moku数字PID控制器实现系统实时调节与验证
一步到位,Moku数字PID控制器实现系统实时调节与验证

PID控制被广泛应用于实验控制和工业自动化系统中,但在实际调试中,传统的PID控制器往往需要大量计算与经验积累,调节过程既繁琐又耗时。而通过使用Moku:Pro的数字PID控制器,您可以根据增益曲线图以实时动态地方式进行参数调节,并使用内置的示波器即时观察响应信号。以更加直观、实时的方式实现系统调节。比起传统反馈系统,这使得通过实际观察来调节控制器更加容易,并且无需用户进行大量的计算。
我们有一篇非常详细的关于频域控制的讲解手册,如果您感兴趣,欢迎联系昊量光电。
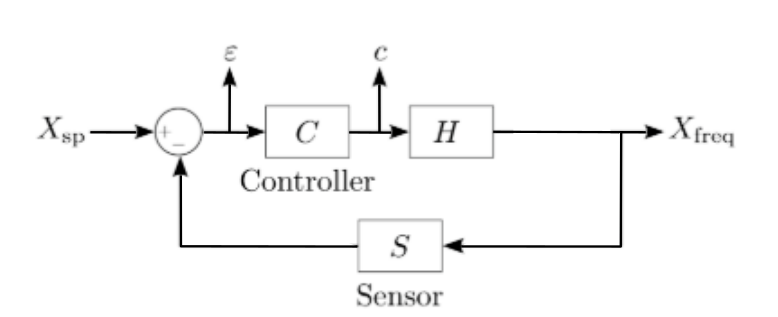
图1:典型反馈系统框图
如图1所示是一个典型的反馈控制系统框图。其中Xsp表示输入设定点,C表示控制器,H表示受控系统,Xfreq表示系统的输出频率。在我们的反馈回路中,S表示用于测量系统输出的传感器。通过将此输出与期望的设定点进行比较,控制器可以补偿系统输出的变化。 这里,设定点与系统输出之间的差值就是误差信号ε。如果传感器输出与设定点一致,则误差信号为零。如果输出大于期望设定点,则误差为负值,控制器根据此时的误差值来降低输出进行调控。
调节反馈控制系统的方法多种多样。在本例中,我们将通过Moku:Pro的#多仪器并行模式,你可以轻松将PID控制器与数字滤波器、示波器和波形发生器集成,构建一个完整的控制与测试平台,演示如何实时调节数字PID控制器。首先,输入一个单位阶跃信号,观察系统的单位阶跃响应信号,并在观察的同时调整P、I和D参数,以达到想要的调控效果。为了模拟被控系统,我们使用Moku:Pro配置“多仪器并行“模式(图2),部署数字滤波器并配置为100 Hz截止频率的二阶低通滤波器(图3)。最后,使用示波器内置的波形发生器产生方波信号作为阶跃输入信号(图4)。
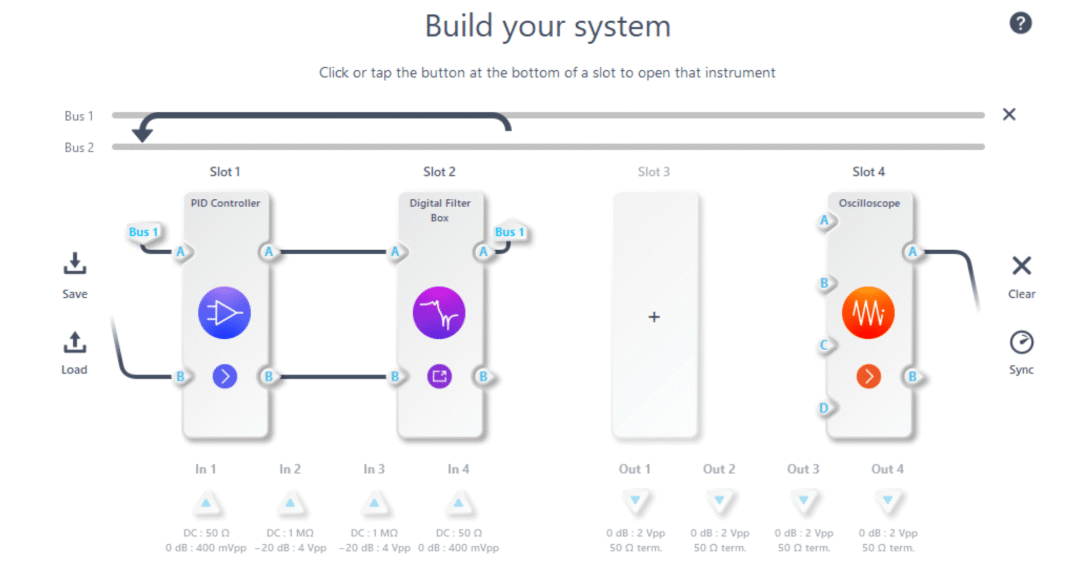
图2:在多仪器并行模式下部署数字滤波器替代反馈控制回路里的受控系统
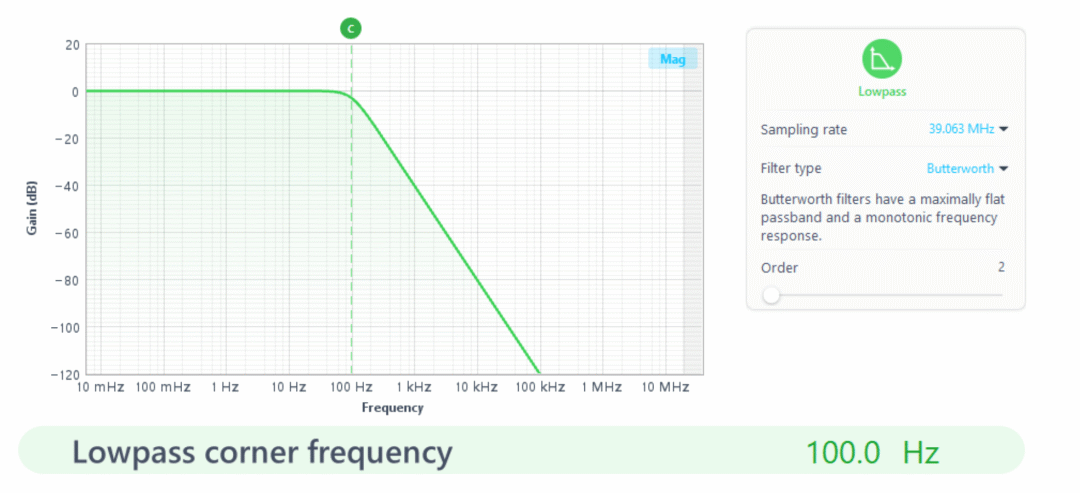 图3:数字滤波器盒低通滤波器配置
图3:数字滤波器盒低通滤波器配置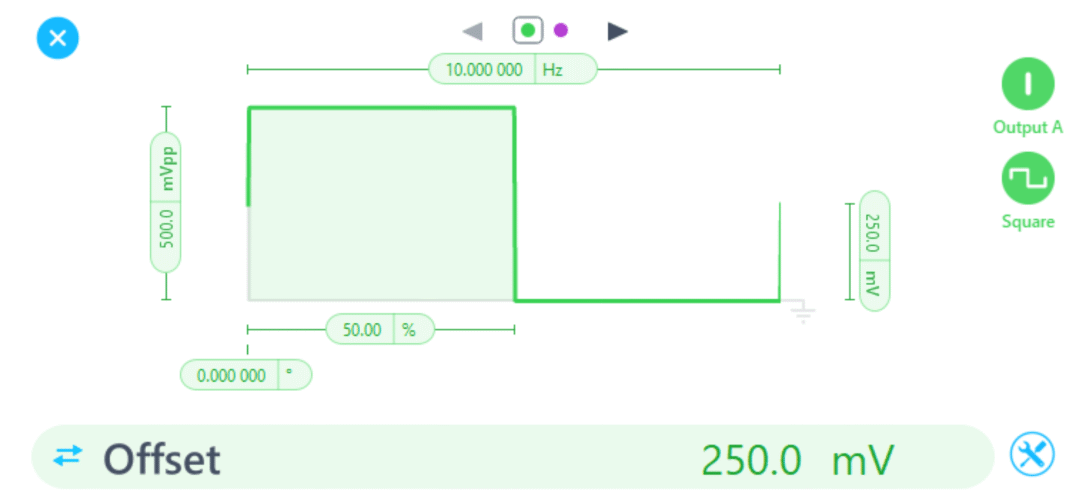 图 4: 使用内置的波形发生器产生阶跃信号
图 4: 使用内置的波形发生器产生阶跃信号
连接实验系统
1. 如图1所示,Moku:Pro的PID控制器作为反馈控制回路里的控制器与受控系统相连。
2. 确保输入信号(即传感器输出信号与设定点Xsp信号之间的差值)和输出的控制信号(即图1中控制器的输出)配置正确连接。将传感器反馈信号连接到Moku:Pro的输入1端口。将Moku:Pro的输出1端口连接到您的受控系统,H的调节输入口。此调节输入信号可以用于压控振荡器(VCO)、激光调制输入或电机控制器的调控。 3. 如图5所示,通过单击用于调节的控制器单元模块来打开增益视图,同时单击在Moku:Pro PID控制器内位于输入和输出侧的信号监测点来激活内置的示波器功能。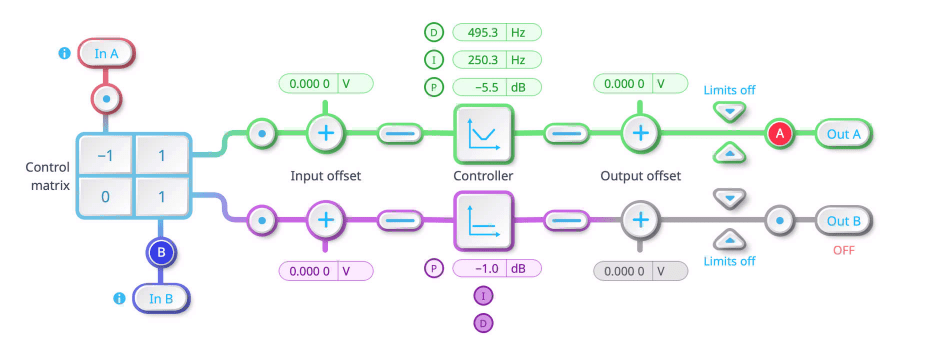
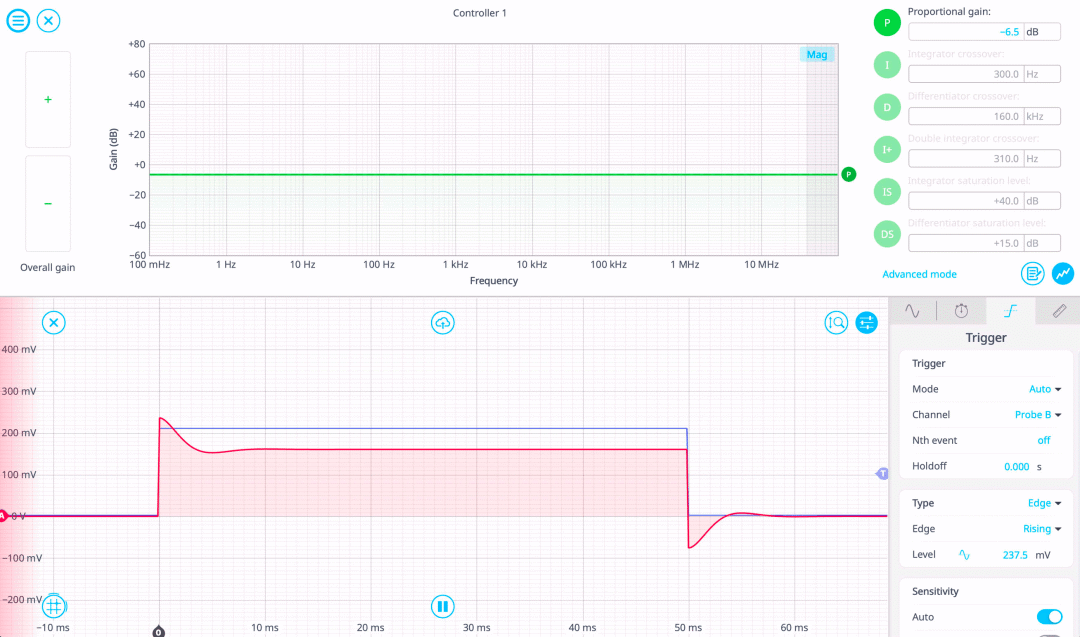
图5:上面是Moku PID控制器的信号处理框图,下面是内置的示波器显示界面
使用Moku:Pro内置的PID控制器时,你可以在图形化界面中拖动增益曲线图来直接调节比例(P)、积分(I)、微分(D)参数,并通过示波器实时观察输出响应。相比传统方法,这种可视化交互式调试方式省去了大量推导与反复试错。
第一步
|比例参数(P)
图6:关闭I参数和D参数,单独增加P参数
1. 开始时,我们关闭 I参数和D参数。
2. 通过拖动视图右侧小图标来调节 P参数,直至系统响应开始变快。3. 在示波器上观察输出信号,如果系统输出发生剧烈振荡,慢慢往回调节 P参数。
第二步
|积分参数(I)消除稳态误差
1. 如图7所示,逐步增加I参数可消除稳态误差。
图7: P参数减小后,微调I参数
2.通过示波器观察是否过冲— I参数过大会造成系统过度振荡。如图8所示,增大I参数到300 Hz,我们会发现系统振荡十分明显。
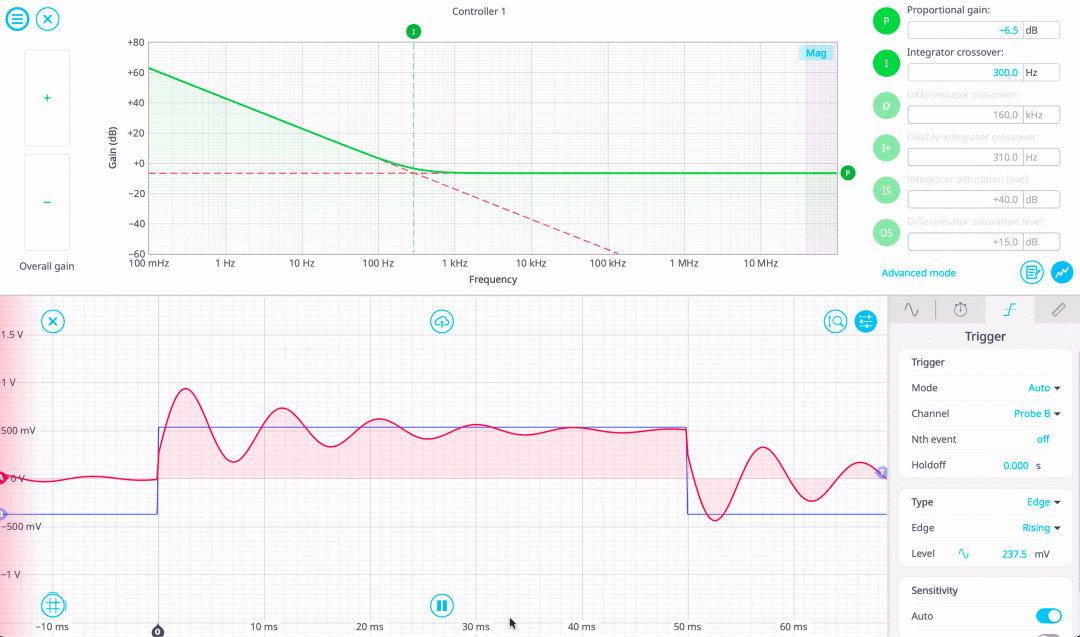
图8:系统振荡随着I参数增大而增大。
3.如果系统振荡增大,可以考虑略微减小P参数。
第三步
|微分参数(D)提升调控稳定度
1. 如图 9所示,设定D参数,缓慢增加来减少过冲,并抑制振荡。
图9:设定好P参数和I参数后,设定D参数到100 Hz
2.这里注意— D参数不佳会因为高频信号被放大造成系统噪声变大。我们可以激活微分饱和参数来限制高频增益。
3.最后,一边调节P、I和D参数,一边观察示波器上的信号,最终获得最佳的调控效果。
我们可以采用微调方式加上在示波器上实时观察阶跃响应来进一步精确调节。通过使用示波器内置的测量功能,我们也能同时对上升时间、过冲、下冲等进行监测,然后可以按需将这些检测信息记录到一个文件内。这些测量轨迹可以导出并转换成.MAT类型的文件,然后在MATLAB中被用作后续分析处理。我们也可以按需设置PID控制器输出侧的限压器来保护下一级受控单元,滤波器,或者调整采样率来提高稳定度。如果要实现级联控制器,我们可以使用Moku:Pro的多仪器并行模式。
联系昊量光电获取《Moku PID控制器调参方法快速指南》,您还可以结合经典调节技巧如:
Ziegler-Nichols方法:快速获取临界增益与振荡周期,进行初步参数设置
响应导向法:先调P,再加I,最后加D,优化过冲与稳态误差
频域调节法:通过系统增益与相位裕度调节提高鲁棒性
通过Moku将多个功能模块整合在一个平台,我们提供了一种全新、直观的方式来调节闭环控制系统。无需额外的硬件成本即可让传统复杂的控制器调节流程变得直观、高效、精确。实验室教学也变得简单,学生可通过GUI观察系统响应,直观理解反馈控制原理。
-
控制器
+关注
关注
114文章
17251浏览量
185410 -
PID
+关注
关注
37文章
1484浏览量
88576 -
工业自动化
+关注
关注
17文章
2795浏览量
68513
发布评论请先 登录
数字一体机 是一步到位的选择?
小米宣布:智能门锁Pro的slogan是“前锁未见,一步到位”
Moku:Go PID控制器实验案例
工业级可拆卸智能安全帽,让企业数字化现场作业升级一步到位!








 工商网监
工商网监
评论