 通信新思路:EtherCAT转Profinet网关在自主研发机器人中的技术实践与优化
通信新思路:EtherCAT转Profinet网关在自主研发机器人中的技术实践与优化


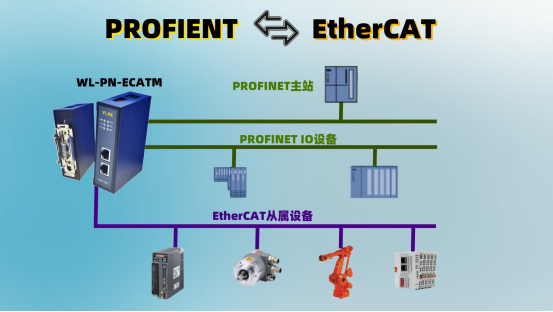
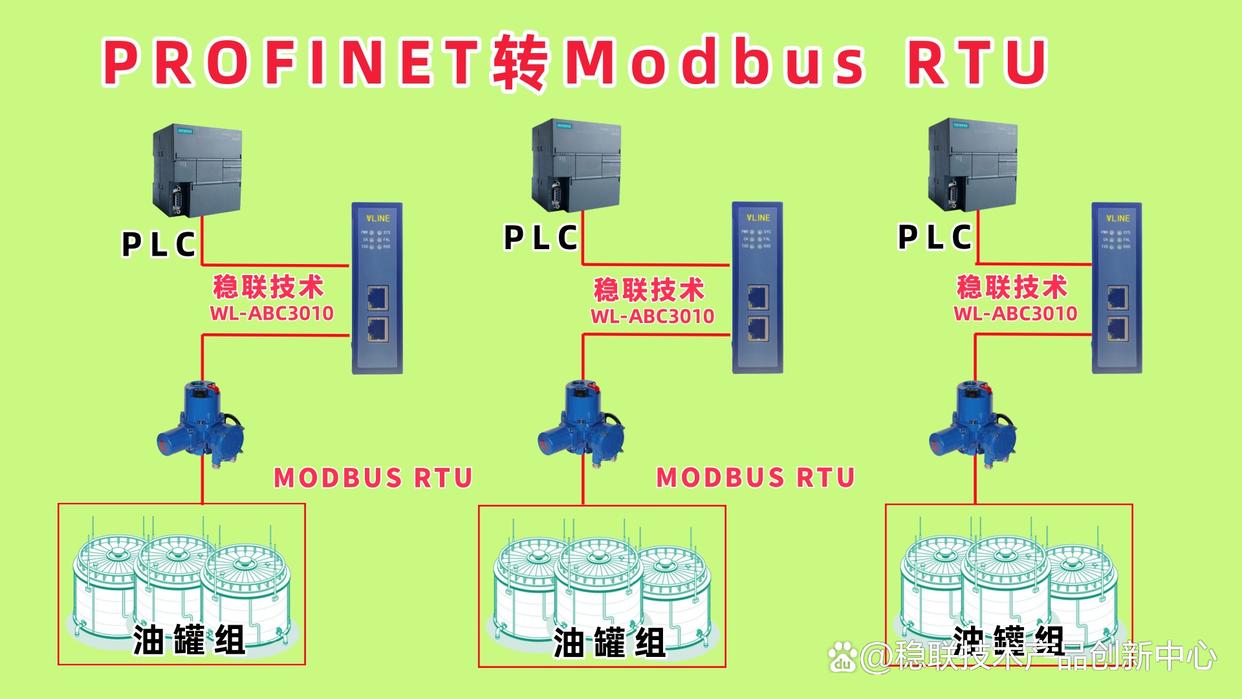
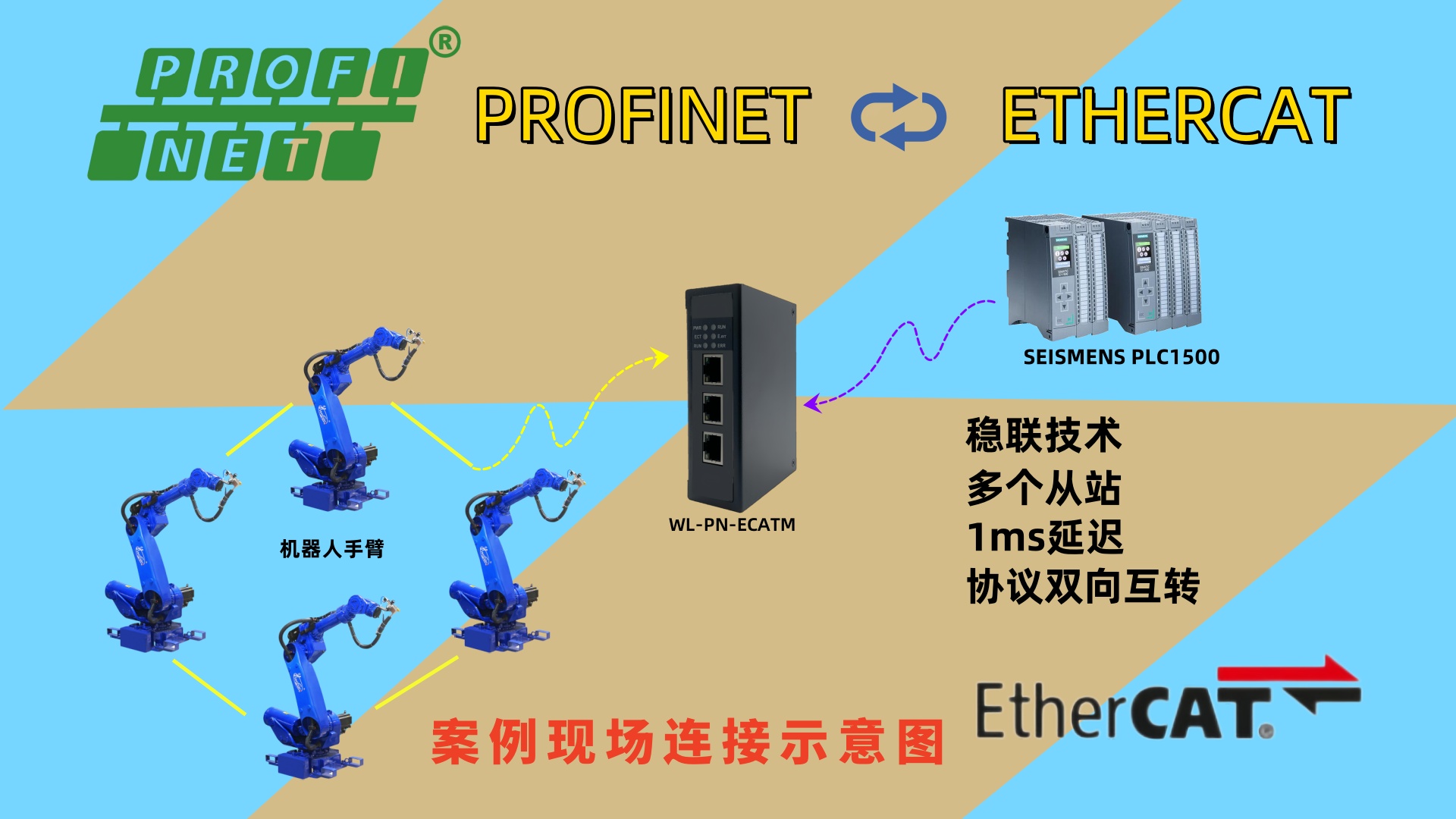
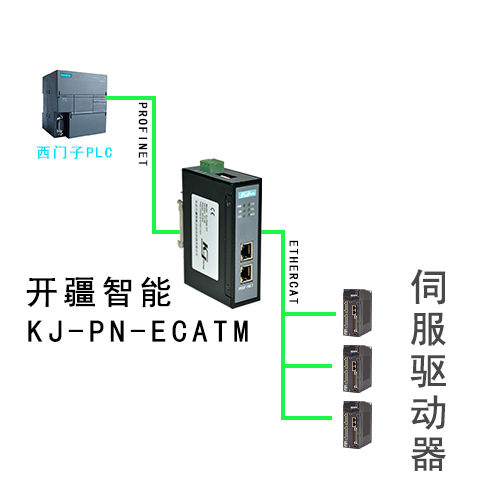
在近期的自动化项目实施中,我们遇到了客户自主研发机器人主站与西门子PLC之间的通信挑战。由于客户机器人采用EtherCAT主站协议,而西门子PLC则采用Profinet通信协议,二者协议不同,无法直接通信。为解决这一问题,我们采用了稳联技术Profinet从站转EtherCAT从站网关WL-PNS-ECAT进行通信转换。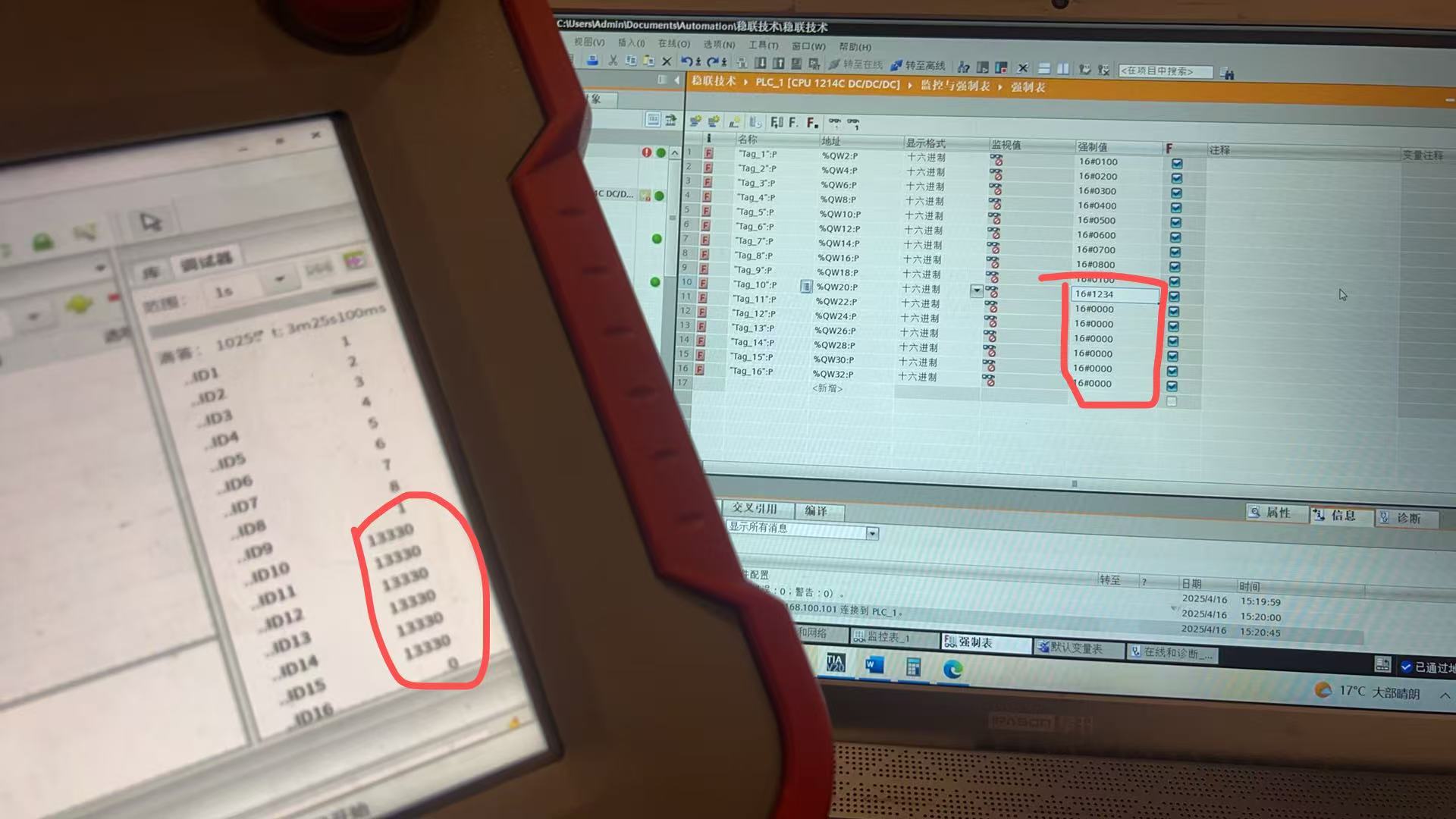
在现场调试过程中,我们发现市面标准网关设备的通用固件无法与客户自研机器人主站完全兼容,具体表现为数据映射异常、实时性不足以及周期性通信中断等问题。为此,我们深入分析了客户机器人主站的通信协议特性,重新设计了EtherCAT从站端的通信映射表,并对网关固件进行了二次开发和优化,确保网关能够准确地解析并实时传输数据。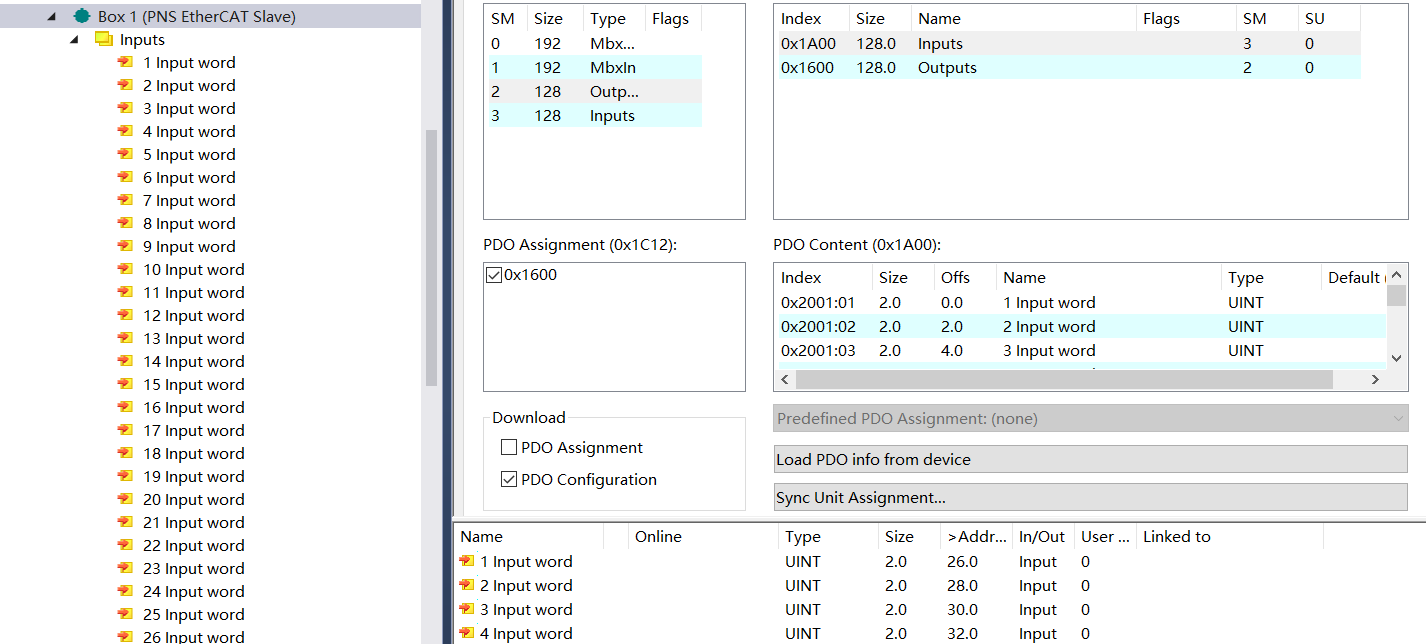
经过固件调整和现场反复调测,我们成功实现了机器人主站与PLC之间的稳定实时通信。工业相机识别的OK/NG状态及位置数据能够实时准确地传输至机器人端,机器人顺利完成高速追踪、精准抓取和剔除动作。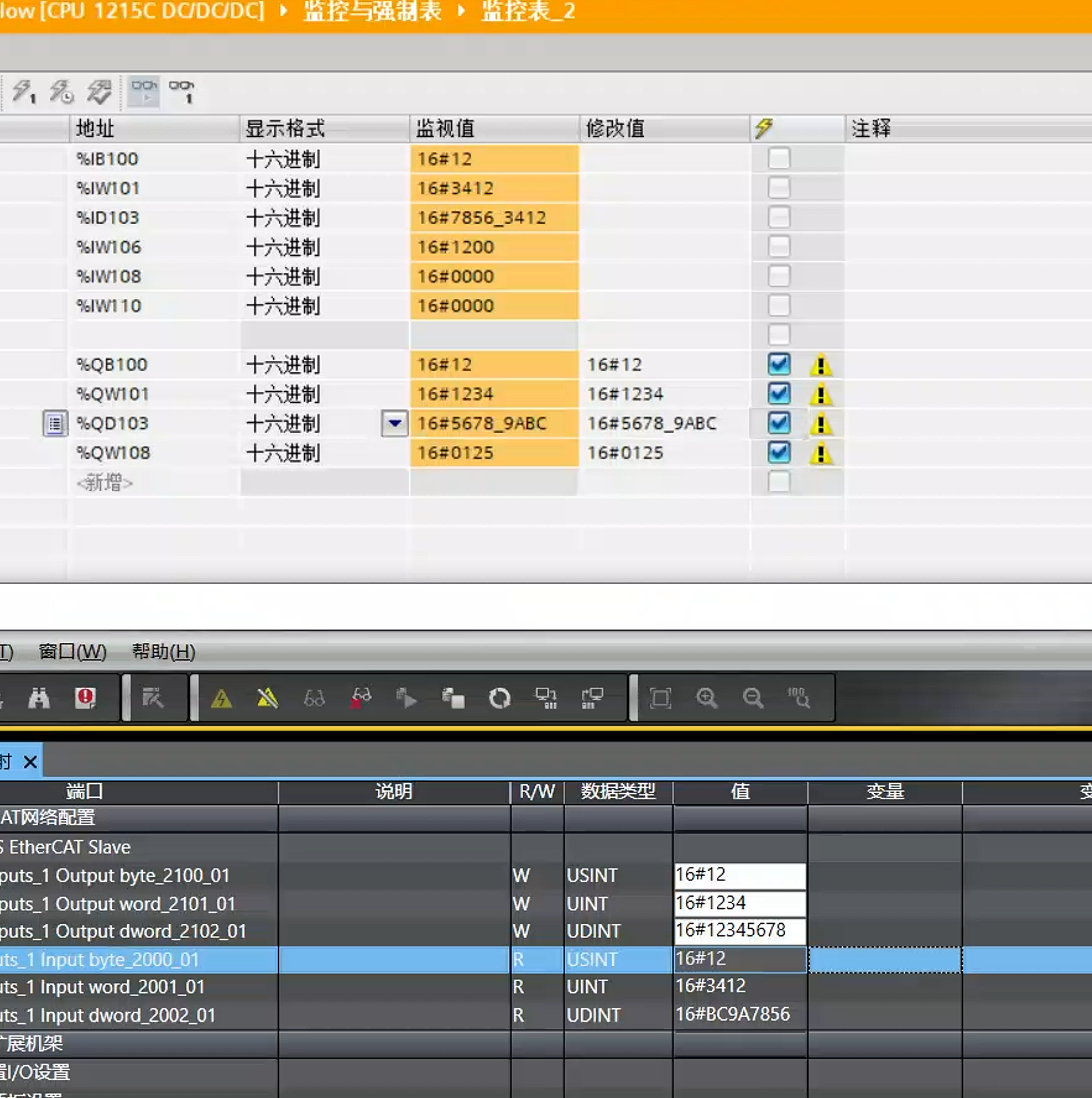
本次经验表明,面对非标准化自主研发设备的通信集成,深入理解协议本质并适当定制开发是关键。通过技术攻关,我们不仅解决了客户的实际问题,也为国产自主研发机器人设备的兼容性与应用推广积累了宝贵经验。
审核编辑 黄宇
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
213文章
29829浏览量
213594 -
Profinet
+关注
关注
6文章
1733浏览量
25792 -
ethercat
+关注
关注
19文章
1145浏览量
40203 -
协议网关
+关注
关注
0文章
342浏览量
3977
发布评论请先 登录
相关推荐
热点推荐
PROFINET转EtherCAT网关的基础原理应用
IO站点可能采用不同的协议。 PROFINET转EtherCAT网关工作原理 于PROFINET端,网关
跨协议探秘:profinet转ethernet ip网关搞定川崎机器人与PLC通信
在工业自动化场景中,不同品牌的设备往往采用不同的通信协议,例如西门子PLC通常使用 PROFINET ,而川崎机器人则可能采用 Ethernet/IP 。要让它们实现数据交互,通常需要借助

当机器人遇上“语言障碍”:CCLINKIE转Profinet的“破冰外挂”来啦\\!
已成为核心竞争力。CCLINKIE转Profinet网关的价值,不仅是解决“语言不通”的表层问题,更是通过协议互联释放设备潜能——正如某主机厂技术总监所言:“在智能制造时代,能让10年
发表于 06-04 14:31

Modbus TCP 转 Profinet 网关核心技术揭秘:通信效率与能耗监测的双重优化
在工业自动化和能耗监测领域,不同通讯协议之间的转换一直是技术应用的关键环节。今天,我们将探讨小疆智控Modbus TCP转Profinet网关在这一过程中的作用以及其在能耗监测中

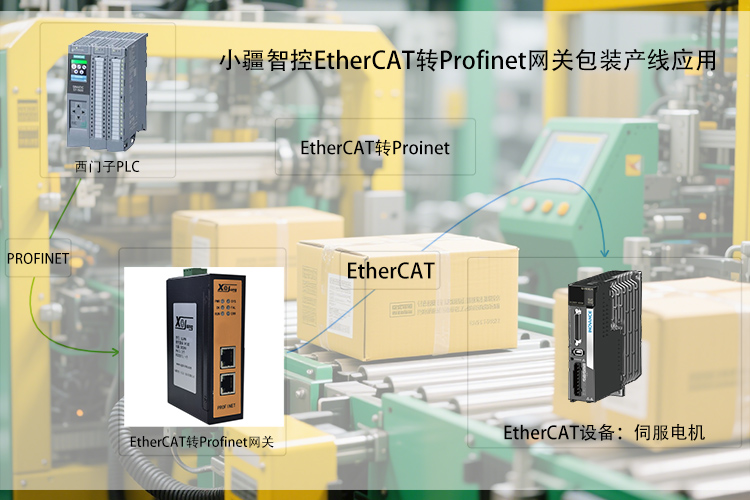
EtherCAT转Profinet网关,包装产线的“语言翻译器”
EtherCAT转Profinet网关在包装行业中的现场应用:在现代包装行业,自动化与智能化已成为提升生产效率、保证产品质量的关键。小疆智控Ethe

EtherCAT转Profinet网关,包装产线的“语言翻译器”
EtherCAT转Profinet网关在包装行业中的现场应用:在现代包装行业,自动化与智能化已成为提升生产效率、保证产品质量的关键。小疆智控Ethe
智能交响:EtherCAT转Profinet网关开启汽车自动化通信新纪元
和EtherCAT通信协议。为实现不同协议设备之间的快速精准通讯,通常需要使用Profinet转EtherCAT
工业中Profinet转EtherCAT协议通信:高效节能的秘诀
通过利用Profinet转EtherCAT网关,这些机器人可以实现精准同步,从而避免了因等待或重复操作而造成的能源浪费。同时,

ModbusTCP转CCLINKIE在机器人中的革命性应用!
开疆智能CCLINKIE转ModbusTCP网关在机器人产品中的应用,不仅解决了不同通信协议之间的兼容问题,还促进了机器人

解锁工业通信新境界:Profinet 协议转 EtherCAT 协议工业网关
与适用场景。然而,由于不同设备可能采用不同协议,通信壁垒常常阻碍着工业系统的集成与优化。这时候,明达自主研发推出了一款支持Profinet

开疆智能Profinet转EthernetIP从网关连接ABB机器人做EtherNet主配置案例
开疆智能Profinet转Ethernet/IP从网关连接ABB机器人做EtherNet主站配置案设置机器人的Ethernet参数
profinet转Ethernet网关在工业现场如何应用
通过配置Profinet转Ethernet网关,成功实现了Profinet设备与Ethernet设备之间的高效通信。在配置过程中,需要仔细核
profinet转ethercat连接伺服在工业现场的配置案例
在工业通信领域,Profinet 转 EtherCAT 网关的应用为实现不同工业网络之间的通信提





 工商网监
工商网监
评论