 从控制到感知,一文读懂纳芯微的人形机器人布局(上篇)
从控制到感知,一文读懂纳芯微的人形机器人布局(上篇)

电子发烧友网报道(文 / 吴子鹏)人形机器人的控制链和感知链,构成了其实现智能化操作与环境交互的核心技术体系。凭借控制链与感知链的深度协同,人形机器人正逐步攻克非结构化环境下的多任务执行难题,成为工业、服务、医疗等领域的关键生产力工具。
在电子发烧友网《人形机器人的电机控制和传感器》专题中,我们特邀纳芯微技术市场经理高峰、陈旭骅两位技术专家。他们分享了纳芯微公司在人形机器人控制链和感知链方面的布局与具体实践,以及这两大领域的后续发展趋势。本文为上篇,主要聚焦高峰关于纳芯微在人形机器人控制链方面的布局阐述。
 ?
?
纳芯微技术市场经理高峰
高峰指出,人形机器人的控制链路与传统工业控制存在显著差异。以电机驱动为例,首先人形机器人需具备多自由度,每个关节可能配备多个电机,像肩部、肘部等部位,需要更为复杂的协同控制算法,极大地提升了系统复杂度。而传统电机,如传送带电机,往往只需控制单一自由度,仅需控制速度即可。
其次是动态平衡和实时调整。人形机器人在行走或跑步时,必须保持平衡。传统电机,如风扇电机,设定转速后通常无需频繁调整。但人形机器人则需要依据传感器数据实时调整力矩和位置,例如借助 IMU 反馈来调整姿态,防止摔倒。这就需要更快的响应时间以及更复杂的控制算法,如模型预测控制。
第三是柔顺控制和安全性。鉴于人形机器人需与人类互动,安全性至关重要。传统电机,如机床电机,可能追求高刚性以实现精准定位。但人形机器人则需要检测外部力,例如在碰撞时减小力矩或停止运行,采用力控或阻抗控制,确保与人接触时的安全。
第四是高精度和高动态响应。人形机器人动作复杂多样,如快速挥手或精细抓取,这要求电机能够快速响应(如毫秒级调整),具备更高的带宽和更低的延迟,同时还要处理多轴同步问题。传统电机,如洗衣机电机,对响应速度要求并不高,只需稳定转动即可。
第五是能源效率和热管理。人形机器人通常依靠电池供电,因此需要高效利用能源。而许多传统电机直接连接电源,对能耗要求并不严苛。所以人形电机会优化控制算法以降低能耗,同时还要处理散热问题,因为紧凑的结构可能导致热量积聚,影响性能和寿命。
第六是环境适应性和鲁棒性。人形机器人需要在不同地形工作,如上下楼梯、不平地面等,这就要求电机能够适应变化。传统电机一般在固定环境运行,如工厂流水线。所以人形机器人需要更强的鲁棒性,以应对地面打滑、负载变化等情况,可能需要采用自适应控制算法。?
第七是集成感知与反馈。人形机器人依赖多种传感器,如力觉、视觉、IMU 等,电机控制需要实时整合这些数据。而传统电机可能仅使用编码器反馈。所以人形系统需要更复杂的传感器融合,比如利用视觉调整步态,或通过力反馈调整抓取力度。
第八是体积和重量限制。人形机器人关节空间有限,电机需要具备高功率密度,如无框电机或定制驱动器。而传统电机一般体积较大,无需考虑紧凑设计。
基于以上对人形机器人电机控制要点的总结,我们可以看到这些都需要结合更高级的控制算法和硬件设计,来应对复杂任务和交互需求。纳芯微持续深耕高阶算法和高集成度产品,致力于解决人形机器人电机控制方面的高要求。
高集成的关节驱动?
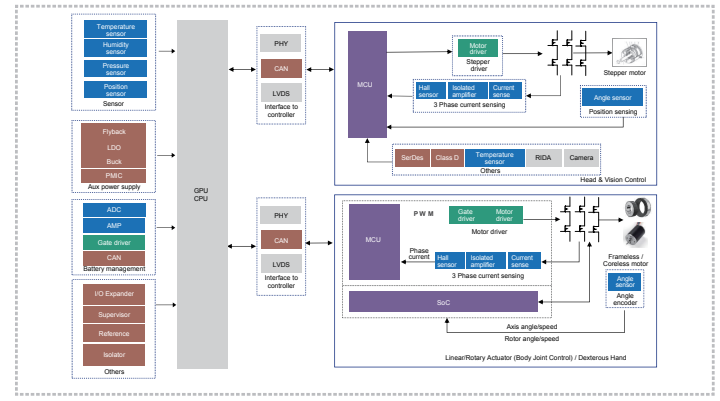
在关节驱动领域,目前无框力矩电机和空心杯电机是主要的电机类型。从原理上讲,它们仍属于永磁电机,因此其驱动架构框图与永磁电机一致,为三相逆变电路。控制驱动板主要包含 MCU、预驱芯片(栅极驱动)、驱动MOSFET/IGBT、相电流检测、母线电压检测和编码器等。
受限于关节电机或灵活手的空间限制,整机厂或方案商通常倾向于选择集成度更高的电机驱动 SoC和更小封装的编码器来实现电机控制,例如集成高压 LDO、通信接口(一般为 CAN 或者 485 通信接口)、MCU 控制内核和预驱电路的高集成度 SoC。对于空心杯电机而言,其部署空间更小,通常尺寸在 φ8mm - φ13mm。未来,高集成度的电机驱动 SoC可能会进一步整合磁编码器,从而实现单芯片解决方案。
纳芯微目前已量产集成预驱的 NSUC1602 芯片和全集成 NSUC1610 芯片,为关节电机或灵活手带来高集成的创新体验。其中,纳芯微 NSUC1602 内核采用 ARM Cortex - M3,内部集成 3 相 BLDC 预驱动器,能够支持包括 FOC 矢量控制或无感六步换相控制等复杂电机算法。该芯片适用于汽车冷却风扇、电子水泵等领域,可支持最高 1.5kW 的电机驱动。该集成芯片可直接应用于具身智能关节模组中线性 / 旋转执行器的无边框电机驱动,其高集成度的芯片设计,特别针对关节电机对空间要求极高的特点,优化了设计空间。
纳芯微在 2023 年初推出的 NSUC1610 则是一款全集成 SoC产品,内核同样为 ARM Cortex - M3,集成预驱、Lin收发器、LDO、MOS 管阵列、DAC 以及双路温度传感器。目前已在各类车用小电机执行器,如各种阀类、空调出风口以及座椅通风功能上实现量产应用。对于空心杯电机驱动控制而言,NSUC1610 的高集成度可搭配磁编码器MT6701 提供一种极简的解决方案。在编码器方面,MT6701 和 MT6826S 分别提供了 QFN3*3 及 QFN4*4 两种小型化封装方案,分别提供 12 位绝对角度控制以及 15 位绝对角度控制方案,能够满足绝大部分空心杯电机的应用需求。
高效的运动控制
在运动控制方面,纳芯微推出的 NSD262x、NSD1224等栅极驱动器,在电机驱动控制中发挥着关键作用,能够精确控制人形机器人的关节电机,确保机器人能够高效、稳定地完成各种动作。这些芯片具备高功率密度、低噪声、高精度等特性,能够为电机提供稳定的驱动信号,实现对电机转速、扭矩的精确控制,保障电机高效稳定运行,从而实现机器人各种复杂动作的流畅执行。
同时,头部与视觉控制部分由 MCU 主导,利用 PWM 信号控制电机驱动和电机运转。然后通过 Hall 传感器的电流感知能力,结合角度传感器、位置传感器等,实现头部动作的精确控制与视觉信息采集的稳定支持。纳芯微在这方面也拥有丰富的方案可供选择。
高可靠的电源和通信
针对人形机器人的电源管理,纳芯微的电源管理产品包括 LDO(NSR31/33/35xxx)、Flyback(NSR284x, NSR28C4x)、Buck(NSR10Axx, NSR104xx, NSR106xx, NSR114xx, NSR1103x)等多种电源管理芯片。这些芯片能够精确监测电池的电量、电压和电流等参数,实现对电池的高效充电和放电管理,延长电池的使用寿命和续航能力。同时,能为机器人各部件提供适配的稳定电源,满足不同模块的电压需求,保障系统正常运行。
在通信领域,纳芯微的 RS485(NSI83086, NSI83085, NCA3176, NSIP83086)和 CAN(NCA1051A, NCA1042B, NSIP1042, NSI1050, NSI1042)用于机器人内部各部件间的通信连接;NSI82xx 系列隔离器则保障通信的稳定性与抗干扰性,其 I/O Expander 用于扩展输入输出接口;电压监控元件 NSR7808 进行电压监控与系统保护;NSREF30/31xx 系列电压基准源提供参考电压,确保系统稳定可靠运行,并为其他元件提供基准支持。
完备的工具链支持?
纳芯微不仅为人形机器人开发提供丰富的芯片解决方案,并提供完备的设计资源支持,包括:?
嵌入式算法库:纳芯微提供基于 ARM Cortex - M3 的 FOC(磁场定向控制)和无感六步换相算法固件,支持客户快速实现电机参数整定与动态响应优化。例如,NSUC1602 芯片内置的三相预驱电路可适配高达 1500W 的电机功率,满足人形机器人关节高扭矩需求。
热管理与可靠性验证工具:结合有限元分析(FEA)模型,纳芯微为客户提供热仿真工具支持,预测电机驱动芯片在极端温度下的性能衰减,并内置 AEC - Q100 Grade 0 级诊断保护功能,确保在 - 40℃ - 150℃环境下稳定运行等。
行业定制化解决方案:纳芯微拥有完整的电机控制解决 IP,包含 PMU,接口 CAN/LIN/485,基于 Cortex - M3 的 MCU 内核,驱动类,传感器类以及电机控制算法研究团队。可以针对人形机器人手部精准控制(如 NSUC1610 + MT6701 用于灵活手空心杯电机控制的解决方案)或者关节电机复杂算法实现提供定制化解决方案,助力客户实现电机算法和优化系统方案。
关节驱动:集成预驱 SoC(NSUC1602/1610)搭配微型磁编码器(MT6701/6826S),实现无框电机 / 空心杯电机的紧凑设计;?
运动控制:栅极驱动器提供稳定可靠的驱动信号,实现对电机转速、扭矩的精确控制;
基础支撑:电源管理芯片组(LDO/Buck/Flyback)保障能源效率,RS485/CAN 通信方案确保信号稳定。
?
此外,纳芯微还提供了完备的开发工具链支持,使人形机器人方案开发更加高效。?
在电子发烧友网《人形机器人的电机控制和传感器》专题中,我们特邀纳芯微技术市场经理高峰、陈旭骅两位技术专家。他们分享了纳芯微公司在人形机器人控制链和感知链方面的布局与具体实践,以及这两大领域的后续发展趋势。本文为上篇,主要聚焦高峰关于纳芯微在人形机器人控制链方面的布局阐述。
?纳芯微技术市场经理高峰
人形机器人在控制方面的特殊要求
控制和驱动系统是人形机器人实现拟人化运动与智能交互的核心技术载体。其拥有一套完整的控制链,涵盖 “大脑” 类人控制、信息传输、关节驱动、运动控制,以及配套的电源管理。高峰指出,人形机器人的控制链路与传统工业控制存在显著差异。以电机驱动为例,首先人形机器人需具备多自由度,每个关节可能配备多个电机,像肩部、肘部等部位,需要更为复杂的协同控制算法,极大地提升了系统复杂度。而传统电机,如传送带电机,往往只需控制单一自由度,仅需控制速度即可。
其次是动态平衡和实时调整。人形机器人在行走或跑步时,必须保持平衡。传统电机,如风扇电机,设定转速后通常无需频繁调整。但人形机器人则需要依据传感器数据实时调整力矩和位置,例如借助 IMU 反馈来调整姿态,防止摔倒。这就需要更快的响应时间以及更复杂的控制算法,如模型预测控制。
第三是柔顺控制和安全性。鉴于人形机器人需与人类互动,安全性至关重要。传统电机,如机床电机,可能追求高刚性以实现精准定位。但人形机器人则需要检测外部力,例如在碰撞时减小力矩或停止运行,采用力控或阻抗控制,确保与人接触时的安全。
第四是高精度和高动态响应。人形机器人动作复杂多样,如快速挥手或精细抓取,这要求电机能够快速响应(如毫秒级调整),具备更高的带宽和更低的延迟,同时还要处理多轴同步问题。传统电机,如洗衣机电机,对响应速度要求并不高,只需稳定转动即可。
第五是能源效率和热管理。人形机器人通常依靠电池供电,因此需要高效利用能源。而许多传统电机直接连接电源,对能耗要求并不严苛。所以人形电机会优化控制算法以降低能耗,同时还要处理散热问题,因为紧凑的结构可能导致热量积聚,影响性能和寿命。
第六是环境适应性和鲁棒性。人形机器人需要在不同地形工作,如上下楼梯、不平地面等,这就要求电机能够适应变化。传统电机一般在固定环境运行,如工厂流水线。所以人形机器人需要更强的鲁棒性,以应对地面打滑、负载变化等情况,可能需要采用自适应控制算法。?
第七是集成感知与反馈。人形机器人依赖多种传感器,如力觉、视觉、IMU 等,电机控制需要实时整合这些数据。而传统电机可能仅使用编码器反馈。所以人形系统需要更复杂的传感器融合,比如利用视觉调整步态,或通过力反馈调整抓取力度。
第八是体积和重量限制。人形机器人关节空间有限,电机需要具备高功率密度,如无框电机或定制驱动器。而传统电机一般体积较大,无需考虑紧凑设计。
基于以上对人形机器人电机控制要点的总结,我们可以看到这些都需要结合更高级的控制算法和硬件设计,来应对复杂任务和交互需求。纳芯微持续深耕高阶算法和高集成度产品,致力于解决人形机器人电机控制方面的高要求。
纳芯微丰富的运动控制方案
芯片作为人形机器人控制系统的核心硬件,通过多层级技术架构,实现对机器人运动、感知、决策的全方位支撑。接下来,我们一同了解纳芯微针对人形机器人控制系统需求推出的芯片方案及配套设计资源。高集成的关节驱动?
在关节驱动领域,目前无框力矩电机和空心杯电机是主要的电机类型。从原理上讲,它们仍属于永磁电机,因此其驱动架构框图与永磁电机一致,为三相逆变电路。控制驱动板主要包含 MCU、预驱芯片(栅极驱动)、驱动MOSFET/IGBT、相电流检测、母线电压检测和编码器等。
受限于关节电机或灵活手的空间限制,整机厂或方案商通常倾向于选择集成度更高的电机驱动 SoC和更小封装的编码器来实现电机控制,例如集成高压 LDO、通信接口(一般为 CAN 或者 485 通信接口)、MCU 控制内核和预驱电路的高集成度 SoC。对于空心杯电机而言,其部署空间更小,通常尺寸在 φ8mm - φ13mm。未来,高集成度的电机驱动 SoC可能会进一步整合磁编码器,从而实现单芯片解决方案。
纳芯微目前已量产集成预驱的 NSUC1602 芯片和全集成 NSUC1610 芯片,为关节电机或灵活手带来高集成的创新体验。其中,纳芯微 NSUC1602 内核采用 ARM Cortex - M3,内部集成 3 相 BLDC 预驱动器,能够支持包括 FOC 矢量控制或无感六步换相控制等复杂电机算法。该芯片适用于汽车冷却风扇、电子水泵等领域,可支持最高 1.5kW 的电机驱动。该集成芯片可直接应用于具身智能关节模组中线性 / 旋转执行器的无边框电机驱动,其高集成度的芯片设计,特别针对关节电机对空间要求极高的特点,优化了设计空间。
纳芯微在 2023 年初推出的 NSUC1610 则是一款全集成 SoC产品,内核同样为 ARM Cortex - M3,集成预驱、Lin收发器、LDO、MOS 管阵列、DAC 以及双路温度传感器。目前已在各类车用小电机执行器,如各种阀类、空调出风口以及座椅通风功能上实现量产应用。对于空心杯电机驱动控制而言,NSUC1610 的高集成度可搭配磁编码器MT6701 提供一种极简的解决方案。在编码器方面,MT6701 和 MT6826S 分别提供了 QFN3*3 及 QFN4*4 两种小型化封装方案,分别提供 12 位绝对角度控制以及 15 位绝对角度控制方案,能够满足绝大部分空心杯电机的应用需求。
高效的运动控制
在运动控制方面,纳芯微推出的 NSD262x、NSD1224等栅极驱动器,在电机驱动控制中发挥着关键作用,能够精确控制人形机器人的关节电机,确保机器人能够高效、稳定地完成各种动作。这些芯片具备高功率密度、低噪声、高精度等特性,能够为电机提供稳定的驱动信号,实现对电机转速、扭矩的精确控制,保障电机高效稳定运行,从而实现机器人各种复杂动作的流畅执行。
同时,头部与视觉控制部分由 MCU 主导,利用 PWM 信号控制电机驱动和电机运转。然后通过 Hall 传感器的电流感知能力,结合角度传感器、位置传感器等,实现头部动作的精确控制与视觉信息采集的稳定支持。纳芯微在这方面也拥有丰富的方案可供选择。
高可靠的电源和通信
针对人形机器人的电源管理,纳芯微的电源管理产品包括 LDO(NSR31/33/35xxx)、Flyback(NSR284x, NSR28C4x)、Buck(NSR10Axx, NSR104xx, NSR106xx, NSR114xx, NSR1103x)等多种电源管理芯片。这些芯片能够精确监测电池的电量、电压和电流等参数,实现对电池的高效充电和放电管理,延长电池的使用寿命和续航能力。同时,能为机器人各部件提供适配的稳定电源,满足不同模块的电压需求,保障系统正常运行。
在通信领域,纳芯微的 RS485(NSI83086, NSI83085, NCA3176, NSIP83086)和 CAN(NCA1051A, NCA1042B, NSIP1042, NSI1050, NSI1042)用于机器人内部各部件间的通信连接;NSI82xx 系列隔离器则保障通信的稳定性与抗干扰性,其 I/O Expander 用于扩展输入输出接口;电压监控元件 NSR7808 进行电压监控与系统保护;NSREF30/31xx 系列电压基准源提供参考电压,确保系统稳定可靠运行,并为其他元件提供基准支持。
完备的工具链支持?
纳芯微不仅为人形机器人开发提供丰富的芯片解决方案,并提供完备的设计资源支持,包括:?
嵌入式算法库:纳芯微提供基于 ARM Cortex - M3 的 FOC(磁场定向控制)和无感六步换相算法固件,支持客户快速实现电机参数整定与动态响应优化。例如,NSUC1602 芯片内置的三相预驱电路可适配高达 1500W 的电机功率,满足人形机器人关节高扭矩需求。
热管理与可靠性验证工具:结合有限元分析(FEA)模型,纳芯微为客户提供热仿真工具支持,预测电机驱动芯片在极端温度下的性能衰减,并内置 AEC - Q100 Grade 0 级诊断保护功能,确保在 - 40℃ - 150℃环境下稳定运行等。
行业定制化解决方案:纳芯微拥有完整的电机控制解决 IP,包含 PMU,接口 CAN/LIN/485,基于 Cortex - M3 的 MCU 内核,驱动类,传感器类以及电机控制算法研究团队。可以针对人形机器人手部精准控制(如 NSUC1610 + MT6701 用于灵活手空心杯电机控制的解决方案)或者关节电机复杂算法实现提供定制化解决方案,助力客户实现电机算法和优化系统方案。
小结?
针对人形机器人多自由度、高动态响应需求,纳芯微推出全链路控制解决方案:?关节驱动:集成预驱 SoC(NSUC1602/1610)搭配微型磁编码器(MT6701/6826S),实现无框电机 / 空心杯电机的紧凑设计;?
运动控制:栅极驱动器提供稳定可靠的驱动信号,实现对电机转速、扭矩的精确控制;
基础支撑:电源管理芯片组(LDO/Buck/Flyback)保障能源效率,RS485/CAN 通信方案确保信号稳定。
?
此外,纳芯微还提供了完备的开发工具链支持,使人形机器人方案开发更加高效。?
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
mcu
+关注
关注
146文章
18027浏览量
368991 -
机器人
+关注
关注
213文章
29829浏览量
213542 -
纳芯微
+关注
关注
2文章
327浏览量
15198
发布评论请先 登录
相关推荐
热点推荐
人形机器人感知革命!创新形态机器视觉传感器涌现
能力归运动能力,人形机器人目前主要还是需要预设固定程序运行,离真正要实现具身智能还很远。要实现具身智能,还需要AI、算力、感知的配合。最近速腾聚创、锐思智芯分别推出了创新形态的

人形机器人“造车”,车企扎堆布局!
电子发烧友网报道(文/黄晶晶)12月26日,广汽集团正式发布自主研发的第三代具身智能人形机器人——GoMate。在业界引发新一轮人形

AI驱动的人形机器人,成为激光雷达产业的下一个爆发点
电子发烧友网报道(文/梁浩斌)过去两年,激光雷达跟随ADAS在电动汽车上大放异彩。作为视觉感知基础上的进阶感知硬件,激光雷达在机器人领域的应用,也开始随着


人形机器人火爆背后,先楫半导体解构运动控制芯片进化密码
。近年来,全球人形机器人产业规模持续扩大,预计未来十年将继续保持高速增长的趋势。 作为国产高性能RISC-V内核MCU芯片设计企业,先楫半导体的产品涵盖微控制器芯片及其解决方案,已贯通从
发表于 05-07 16:40
?3470次阅读

从单芯片方案到多类型传感,ADI赋能人形机器人创新
” 的关键时期,预计 2025 年至 2027 年为行业发展的窗口期,2027 年之后将迎来真正的爆发。《人形机器人产业研究报告》预测,到 2035 年,中国人形

让人形机器人像人一样去感知,这家国产芯片公司选择从信号链入手
能力。 ? 在电子发烧友网《人形机器人的电机控制和传感器》专题中,芯海科技模拟信号链产品线总经理李晓在接受电子发烧友网采访时指出,人形

一文读懂德州仪器的人形机器人电机驱动和传感布局
电子发烧友网报道(文/吴子鹏)随着 AI 大模型、电机驱动和多模态传感等核心技术不断取得突破,人形机器人正处于技术突破与规模量产的临界点,展现出巨大的发展潜力。《人形

从控制到感知,一文读懂纳芯微的人形机器人布局(下篇)
领域的关键生产力要素。 ? 在电子发烧友网《人形机器人的电机控制和传感器》专题中,我们特邀纳芯微

通关人形机器人控制链,这家国产RISC-V芯片公司做到了
电子发烧友网报道(文/吴子鹏)近来,人形机器人产业爆火,引发广泛关注。从系统构成来看,人形机器人

基于IMX219和IWR6843ISK的人形机器人毫米波雷达感应和传感器融合
从科幻走入现实,人形机器人正经历一场静默而深刻的技术革命:更高效的能源控制、更精准的运动算法、更高速的通信架构、更智能的环境

伺服电动缸在人形机器人中的应用
集成高精密减速器、高性能电机、丝杆机构、传感器以及伺服控制系统,伺服电动缸在保证更小体积的基础上实现了驱控一体化,从而满足了人形机器人复杂场景的应用需求。四、提升性能与可靠性德迈传动伺
发表于 02-06 09:04
人形机器人感知变化的未来
电子皮肤作为一种新型的仿生柔性触觉传感系统,在人形机器人的感知过程中扮演着至关重要的角色。尽管国内部分厂商已经开始布局柔性触觉传感器的生产,






 工商网监
工商网监
评论