 用于黑暗中视觉自我运动估计的新型主动照明框架
用于黑暗中视觉自我运动估计的新型主动照明框架

本文提出一种新型主动照明框架,通过动态控制可移动光源主动照亮高纹理区域,显著提升VO与VSLAM算法在极端光照条件下的性能。在真实机器人平台上进行的实验表明,相比传统固定照明方法,本文方法可将姿态估计误差最高降低75%。
? 文章:
Active Illumination for Visual Ego-Motion Estimation in the Dark
? 作者:
Francesco Crocetti, Alberto Dionigi, Raffaele Brilli, Gabriele Costante, Paolo Valigi
? 论文链接:
https://arxiv.org/abs/2502.13708
? 编译:
INDEMIND
01 本文核心内容
基于视觉的位姿估计是实现移动机器人定位最广泛采用的策略之一。过去几十年间,多种高效的VO(视觉里程计)和VSLAM方法不断涌现,而近期视觉-惯性融合技术的出现更是展现了卓越性能。
VO和VSLAM解决方案的有效性依赖于提鲁棒且高区分性视觉特征的能力。这些特征可以是稀疏的、密集的,甚至是基于学习的。大多数前沿研究假设视觉估计系统的运行条件接近理想状态,即场景纹理丰富且光照条件适宜。然而,即使特征提取与跟踪模块的性能轻微下降,也可能导致整个估计流程的失败。尽管如此,许多应用(如灾害救援或地下勘探)要求机器人平台在远非理想的环境中运行。尤其是低光照或完全黑暗的环境,对基于视觉的系统而言是最具挑战性的场景,因为此类环境几乎完全无法提取有效的视觉线索。
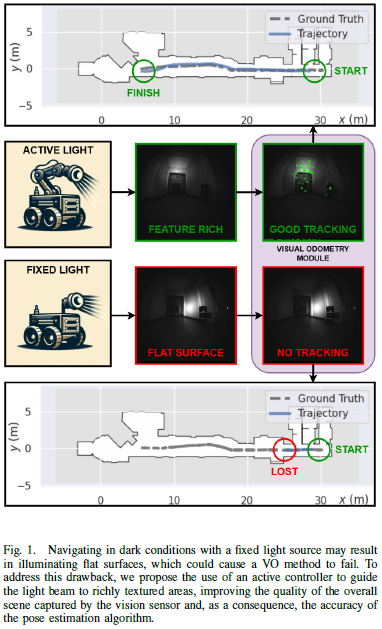
一种直接的解决方案是为机器人配备强力广角光源以照亮相机捕获的整个场景。然而,这种方法存在两个显著缺陷:(i)能效低下,电池能量被浪费在照亮无纹理区域(如平坦表面);(ii)在大规模环境中,由于光线过度散射,光源功率可能不足以充分照亮整个场景。反之,采用固定式窄光束光源虽然能效更高,并可有效照亮场景的远距离部分以提升可见性,但由于大部分区域仍处于未照明状态,特征跟踪极易丢失。
受上述挑战的启发,本文提出了一种创新方法以推动技术前沿。如图1所示,我们为机器人配备搭载在机械臂上的窄光束光源,并开发了一种新方法用于识别场景中预期包含最显著特征信息的区域。这使得我们能够定义控制机械臂的设定点,动态调整光束方向。相机图像以预定义频率持续采样,并通过基于深度学习的增强网络进行处理,生成增强图像流。随后,系统分析这些图像以确定目标区域,进而驱动搭载LED聚光末端执行器的机械臂调整光束聚焦位置。
据我们所知,这是首个通过机械臂实现主动光束自适应调整以支持基于视觉的位姿估计的方法。
02 主要贡献
动态特征区域识别:设计低光环境下图像高特征密度区域动态检测方法;
主动光源控制:提出信息驱动策略控制可移动光源聚焦环境纹理丰富区域;
实验验证:构建搭载可控光源的机器人平台,通过真实场景实验证明本方法显著优于现有技术。
03 方法架构
在本研究中,我们考虑完全黑暗环境下的场景,以及配备带有定向机械臂安装光源的移动机器人。所提出的主动照明方法的目标是为机器人平台提供合适的光束方向控制策略,以通过VO或VSLAM算法获得最佳的机器人位姿估计。
为此,我们设计了一种新型的低光条件下视觉定位框架。该框架利用图像增强生成对抗网络(GAN)来识别高特征密度区域,并结合一种新型主动照明策略和机械臂控制器对这些区域进行照明。
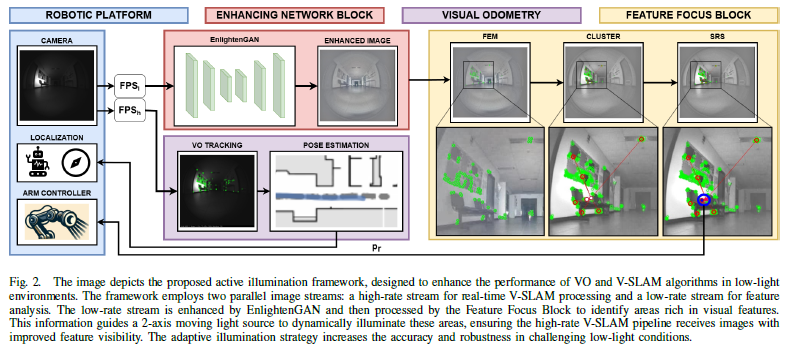
图2所示的开发框架围绕一个核心要素——双轴移动光源展开。该组件赋予机器人动态调节环境光照的能力。该主动照明系统是一款闭环控制装置,能够在暗环境中实现光束的动态调控。在VSLAM算法持续追踪特征点与描述符以进行位姿估计的同时,图像流输入至低帧率重采样器,该设备输出保持原始分辨率但帧率降低的图像。该重采样器作为并行于位姿估计流程的复合处理管道的入口,其处理链路由两大核心模块构成:"增强网络模块(ENB)"与"特征聚焦模块(FFB)",专门负责生成双轴光束设备的控制参考信号。
04 结果
实验活动的结果总结于表I。第一个重要发现是,在几乎所有场景和定义的指标下,主动光源方法AL-VO均优于固定光源方法FL-VO。具体而言,在走廊环境等挑战性场景中,FL-VO持续失败且无法完成轨迹。如图4所示,这是由于FL-VO在导航过程中意外照射平坦表面,导致VO算法因纹理信息不足而失效。相反,得益于主动光源策略,AL-VO能够将光束重新定向至富含角点、边缘和物体的区域,从而完整跟踪所有轨迹 。
。
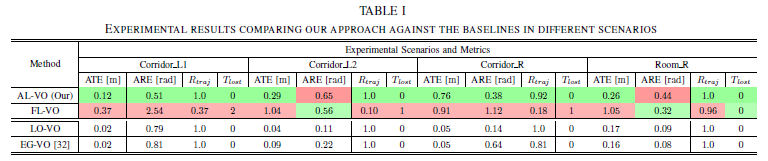
作为参考,我们还纳入了VO算法在最佳光照条件(LO-VO)和低光条件下结合EnlightenGAN增强(EG-VO)的性能指标。与预期一致,LO-VO和EG-VO取得了最佳整体表现。值得注意的是,EG-VO在黑暗条件下表现出色,结果与LO-VO(日光条件)非常接近。但需指出,尽管EnlightenGAN提供了卓越的图像增强能力,其较高的计算复杂度限制了EG-VO在资源受限机器人平台上的部署。因此,在此类场景中,AL-VO是低光VO的更优选择。
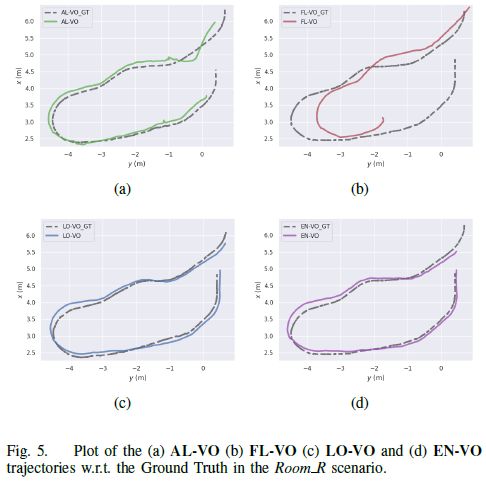
最后,如图5的定性结果所示,所有方法在房间R场景中均能生成合理轨迹。然而,FL-VO在某一弯道区域显著偏离真实轨迹(GT),而AL-VO能够保持与GT轨迹的高度对齐,且得分接近LO-VO和EG-VO。
05 总结
在本研究中,我们提出了一种新型主动照明框架,旨在使VO和VSLAM算法能够在黑暗环境中正常运行。具体而言,我们开发了一种创新性的主动式方法,通过识别并优先照亮图像中特征点最密集的区域。大量真实环境实验验证了该方法的有效性,并凸显了其实际应用潜力。未来的工作将通过在目标选择指标中引入额外参数,将机器人未来运动轨迹纳入考量,从而进一步提升系统性能。
-
机器人
+关注
关注
213文章
29829浏览量
213544 -
照明
+关注
关注
11文章
1571浏览量
132435 -
光源
+关注
关注
3文章
751浏览量
70220 -
VSLAM
+关注
关注
0文章
26浏览量
4549
原文标题:误差降低75%!首个面向黑暗环境下视觉自运动估计的主动照明技术!
文章出处:【微信号:gh_c87a2bc99401,微信公众号:INDEMIND】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
嵌入式主动视觉系统如何实现?
基于DSP的嵌入式通用主动视觉系统该怎么设计?
惠州机器视觉光源常见的几种照明方式
英特尔推出黑暗中快速成像的系统,效果不错

游戏中视觉风格的历史和现状
美科学家研制新型相机可黑暗中拍3D照片
计算机视觉方向简介之视觉惯性里程计


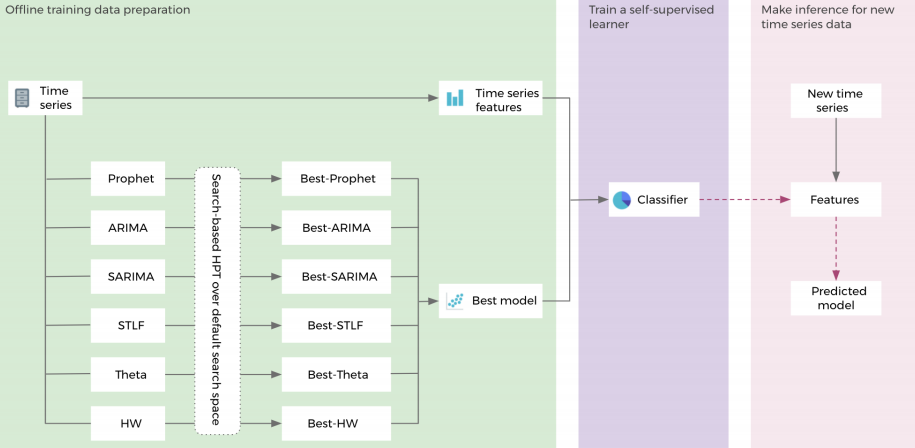
华裔女博士提出:Facebook提出用于超参数调整的自我监督学习框架






 工商网监
工商网监
评论