 用于微纳机器人多级磁控递送研究的体外测试平台
用于微纳机器人多级磁控递送研究的体外测试平台

基于微纳机器人的靶向递送技术在疾病诊断治疗、精准药物递送、无创手术等生物医学领域具有广阔的应用前景。
然而,现有的微纳机器人递送策略面临导航距离有限和易被流体冲散等挑战。同时,微纳机器人的体外测试平台通常缺乏必要的微生理环境,而活体动物模型受限于成像分辨率,对微纳机器人进行实时成像和精确操控仍面临挑战。
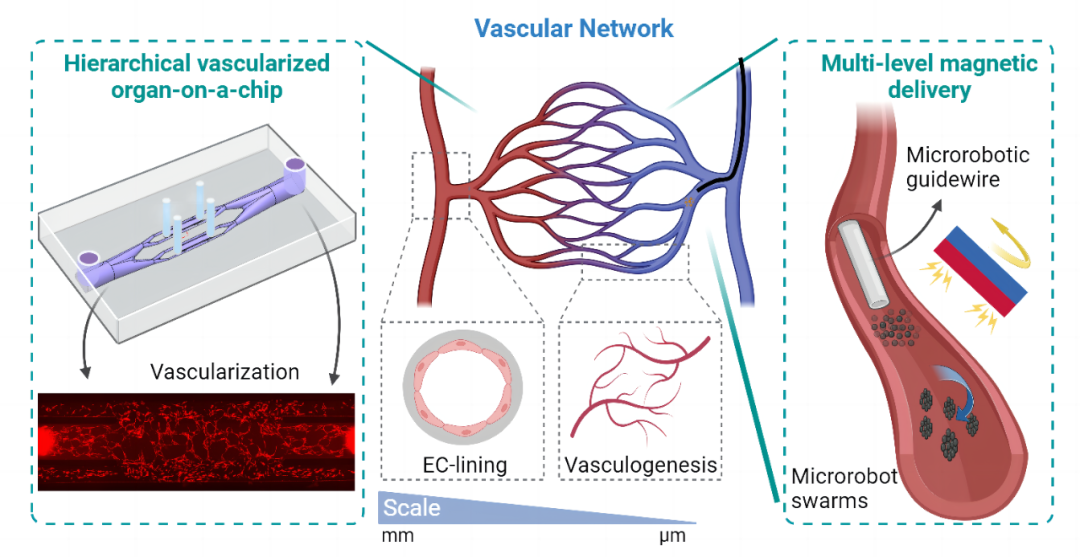
近日,上海交通大学王晓林团队提出了一种基于层级血管化器官芯片的微纳机器人多级磁控递送策略。首先,研究人员提出了一种层级血管化器官芯片设计,通过微纳3D打印技术制备出多尺度微流控器官芯片,进一步结合内皮细胞内衬和血管生成机制,构建出从微米到毫米尺度的层级血管网络,为微纳机器人的测试提供了一个兼备成像、控制和微生理环境的体外生物模型。
基于该模型平台,通过结合栓系磁致动导丝和无栓系游动微纳机器人,提出了一种多级磁控递送策略,有效克服微纳机器人个体运动能力有限及导丝机器人难以进入微小血管的挑战,在复杂动态生理环境下实现了稳定、高效及长距离的微纳机器人递送,有望推动微纳机器人在精准药物递送、智能感知与诊断、血栓消融等领域的应用。
 ?
?
该成果以“Multi-level magnetic microrobot delivery strategy within a hierarchical vascularized organ-on-a-chip”为题,发表在英国皇家化学会期刊Lab on a Chip上,并被央视《新闻直播间》播出的“科技推动力”栏目以“器官芯片模型:模拟人体器官研究药物递送”为题进行了相关报道。
论文信息:
https://doi.org/10.1039/D3LC00770G
审核编辑:刘清
-
机器人
+关注
关注
213文章
29835浏览量
213731 -
微流控芯片
+关注
关注
13文章
306浏览量
19421 -
3D打印
+关注
关注
27文章
3598浏览量
112981
原文标题:基于层级血管化器官芯片的体外测试平台,用于微纳机器人多级磁控递送研究
文章出处:【微信号:Micro-Fluidics,微信公众号:微流控】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
MT6701绝对式磁编码器优化机器人关节伺服控制
安泰高压放大器在微纳机器人研究中的应用介绍
轮式移动机器人电机驱动系统的研究与开发
纳芯微磁传感器技术推动人形机器人性能提升

【「# ROS 2智能机器人开发实践」阅读体验】机器人入门的引路书
从控制到感知,一文读懂纳芯微的人形机器人布局(下篇)

从控制到感知,一文读懂纳芯微的人形机器人布局(上篇)

pogopin磁吸连接器应用于机器人行业的优势分析
名单公布!【书籍评测活动NO.58】ROS 2智能机器人开发实践
【「具身智能机器人系统」阅读体验】+初品的体验
基于漩涡湍流辅助的微流控平台,可实现类精子结构的微型机器人一步成型

应用于人形手机器人超小型HarmonicDrive哈默纳科减速机






 工商网监
工商网监
评论