 子母式微纳米机器人系统,用于颅内跨尺度靶向给药
子母式微纳米机器人系统,用于颅内跨尺度靶向给药

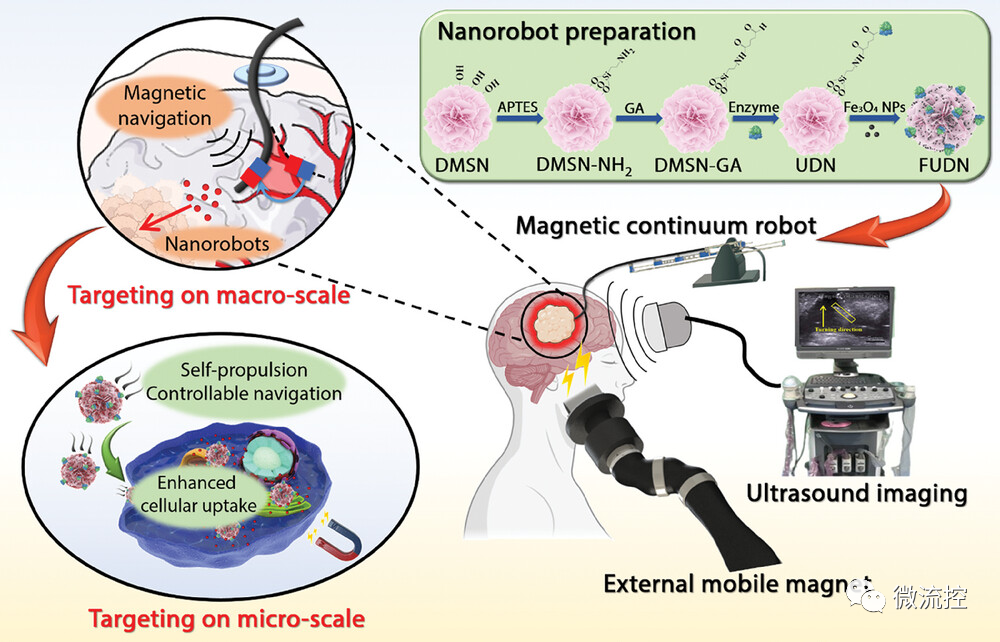
脑胶质瘤是严重危害人类健康的恶性肿瘤,患者中位生存期不到15个月。目前,临床采用的治疗手段包括手术治疗、放化疗和靶向治疗等。其中,靶向治疗面临着因血脑屏障的阻隔使得大部分药物分子不能够进入脑组织的难题。中国科学院沈阳自动化研究所与中国医科大学附属盛京医院合作,研制了一套子母式微纳米机器人系统,可经颅骨微创通道进入颅内,越过血脑屏障抵达胶质瘤部位,将药物精准递送到胶质瘤病灶。相关研究成果以“Dual-Responsive Nanorobot-Based Marsupial Robotic System for Intracranial Cross-Scale Targeting Drug Delivery”为题,发表在Advanced Materials期刊上。
子母式微纳米机器人系统工作原理
机器人系统由磁驱动连续体微型机器人、生物相容性微纳机器人以及外部驱动、成像设备构成。连续体微型机器人首先经过颅骨微创通道进入颅内,越过血脑屏障抵达胶质瘤部位,实现宏观尺度的一级靶向。进而,微纳米机器人经过连续体机器人内部通道到达胶质瘤病灶,并在外场驱动下向肿瘤内部运动及释放药物,实现微观尺度的二级靶向。
该团队分别在体外胶质瘤细胞微环境和离体猪脑组织内开展了试验。结果表明,微纳米机器人可远距离递送到指定病灶,释放药物杀死胶质瘤细胞。这验证了该研究所提出的子母式微纳米机器人跨尺度递送方法的可行性。
后续,该团队将在活体动物颅内开展微纳米机器人跨尺度递送药物的研究及治疗效果评测,并结合临床工作,进一步提升子母式微纳米机器人系统的性能,以期早日将该方法应用于临床,减轻患者的痛苦。
研究工作得到国家自然科学基金和中国科学院稳定支持基础研究青年团队计划的支持。
论文链接: https://doi.org/10.1002/adma.202306876
-
机器人
+关注
关注
213文章
29979浏览量
214684 -
微纳米
+关注
关注
0文章
21浏览量
7632
原文标题:子母式微纳米机器人系统,用于颅内跨尺度靶向给药
文章出处:【微信号:Micro-Fluidics,微信公众号:微流控】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
工业机器人的特点
经颅电刺激系列之交叉短脉冲刺激 ISP






 工商网监
工商网监
评论