 KUKA C4机器人:为宏启用或阻止内联窗体USER
KUKA C4机器人:为宏启用或阻止内联窗体USER

对于不同的宏类型,可以配置内联表单USER是否可用。默认情况下,USER在以下宏中可用:
?自定义宏
?宏观步骤(全部)
makrotrigger
?宏触发器
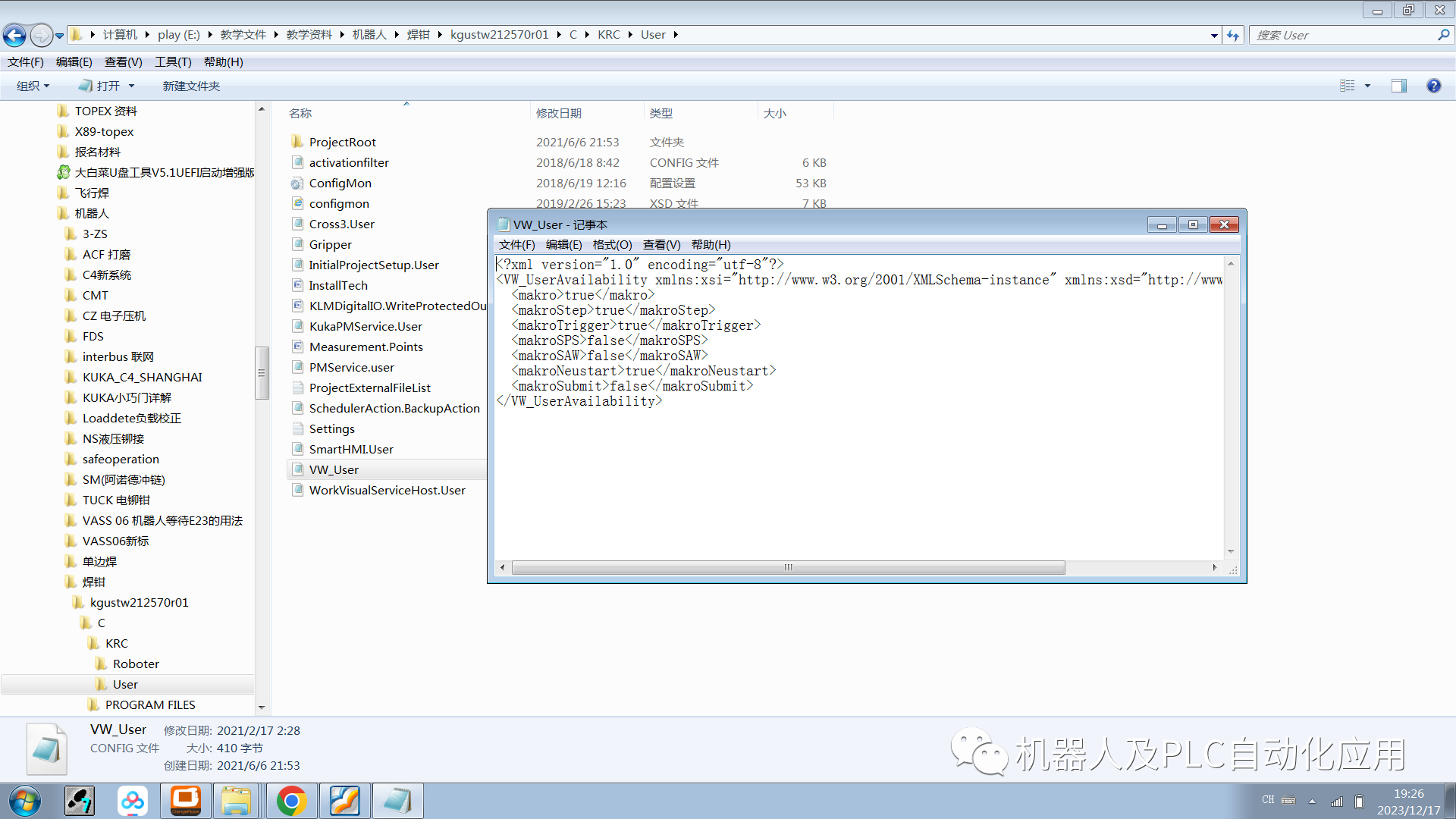
使用默认设置文件VW_User.config
1.在智能HMI上C:KRCUSER目录下的文件VW_USER。打开CONFIG。
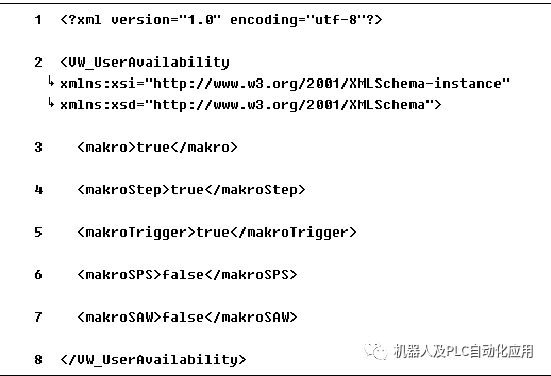
该文件包含每个宏类型的一行,类型名称和值为true或false。
2.要使内联表单USER在宏中可用,请将该值设置为true。
若要锁定宏中的内联窗体,请将值设置为false。
3.使用关闭图标关闭文件。对于是否应保存更改的安全问题,回答“是”。
审核编辑:刘清
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
触发器
+关注
关注
14文章
2042浏览量
62391 -
HMI
+关注
关注
9文章
656浏览量
50310 -
KUKA机器人
+关注
关注
4文章
144浏览量
9714
原文标题:KUKA C4机器人:为宏启用或阻止内联窗体USER
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
工业机器人的特点
的基础,也是三者的实现终端,智能制造装备产业包括高档数控机床、工业机器人、自动化成套生产线、精密仪器仪表、智能传感器、汽车自动化焊接线、柔性自动化生产线、智能农机、3D 打印机等领域。而智能制造装备中工业
发表于 07-26 11:22

盘点#机器人开发平台
地瓜机器人RDK X5开发套件地瓜机器人RDK X5开发套件产品介绍 旭日5芯片10TOPs算力-电子发烧友网机器人开发套件 Kria KR260机器人开发套件 Kria KR260-
发表于 05-13 15:02
详细介绍机场智能指路机器人的工作原理
免与行人发生碰撞,为旅客提供安全、舒适的引导服务。
智能交互系统
语音识别与理解 :智能指路机器人利用先进的语音识别技术,将旅客输入的语音信号转化为文字信息。然后,通过自然语言处理算法对文字进行分析
发表于 05-10 18:26
【「# ROS 2智能机器人开发实践」阅读体验】机器人入门的引路书
的非常好的,特别是一些流程图,很清晰的阐释了概念
很适合作为初学者入门的引路书
还能了解很多技术和框架,破除初学者的自负困境,让初学者知道功能是由很多开发者维护的,前人已经为各种产品搭建了完善的框架。避免陷入得一个人单打独斗的错觉
一直蠢蠢欲动ros2和
发表于 04-30 01:05
【「# ROS 2智能机器人开发实践」阅读体验】+内容初识
21讲为底”,详细讲述了ROS基础理论的内容,同时还官方文档提供了Python/C++双语代码,非常详细完整
机器人设计篇(4-6章)
官方是以OriginBot开源套件
发表于 04-27 11:24
库卡KUKA机器人常见故障维修
1、KUKA机器人伺服电机维修过热原因 ①电源电压过高; ②电源电压过低,电机在额定负载下运行,电流过大使线圈发热; ①修理和拆卸线圈时,热拆卸方法不正确,会烧坏铁芯; ①发动机过载或频繁启动
名单公布!【书籍评测活动NO.58】ROS 2智能机器人开发实践
资格!
从 PC 到智能手机,下一个更大的计算平台是什么?
最佳答案可能是 机器人 !
如果设想成真,则需要有人为机器人“造脑”,即打造适配的计算平台及操作系统。
就像以计算机为平台的计算机时代,和以
发表于 03-03 14:18
全国首个异构人形机器人训练场启用
全国首个异构人形机器人训练场在上海浦东的张江模力社区正式启用。这一具有里程碑意义的事件,为我国人形机器人产业的发展注入了强大动力。 该训练场由国家地方共建人形
【「具身智能机器人系统」阅读体验】2.具身智能机器人的基础模块
具身智能机器人的基础模块,这个是本书的第二部分内容,主要分为四个部分:机器人计算系统,自主机器人的感知系统,自主机器人的定位系统,自主机器人
发表于 01-04 19:22
开源项目!能够精确地行走、跳舞和执行复杂动作的机器人—Tillu
和方向的6轴陀螺仪
用于声音交互的蜂鸣器
以及为魅力加分的显示屏!
这款机器人不仅功能强大,更是一个创意平台。无论你是使用Python编程其动作,还是通过Mind+探索可视化编程,Tillu都是
发表于 01-02 17:24
【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型
,能够利用\"思维链\"的技术将复杂任务分解为多个子任务,以渐进的方式解决问题。这不仅提高了任务的成功率,也显著增强了系统的鲁棒性,使得机器人可以更高效地应对复杂环境和多样化需求
发表于 12-29 23:04





 工商网监
工商网监
评论