 如何精准分析人形机器人运动数据?
如何精准分析人形机器人运动数据?

全球“机器换人”进程加速,人形机器人有望成为AI下一个重要落地应用场景;EtherCAT-Analyzer具备分析人形机器人所有关节和电池与主站的通讯信息,快速掌握节点网络状态!
前言
随着人形机器人行业的发展及《中国制造2025》的全面实施,传统的脉冲模式控制很大程度上制约了机器人的性能,相反,高速工业现场总线EtherCAT利用以太网协议完成工业自动化控制,满足了工业控制工程中通信稳定、大数据量,低延时性的要求,成为机器人主力发展的总线解决方案,且其易于与现场其它设备组网,为实现自动化流水线及建立智能工厂提供了基础。
人形机器人关节作为EtherCAT从站,通过主站控制器轻松完成通信控制。但是,主从通讯过程中经常出现的通讯丢帧、延迟和断开连接等多种问题,严重影响工程师们对于机器人的调试与控制,此时迫切需要专业的分析设备快速定位问题点,“对症下药”,解决问题。
致远电子EtherCAT分析仪EtherCAT-Analyzer应运而生,其具有网络帧统计(流量、转发延时、错误帧、周期抖动)、网络帧时间分析、网络帧内容分析、GPIO事件分析以及帧数据存储等功能,可快速分析评估人形机器人网络状态,给与“良药”快速解决问题。
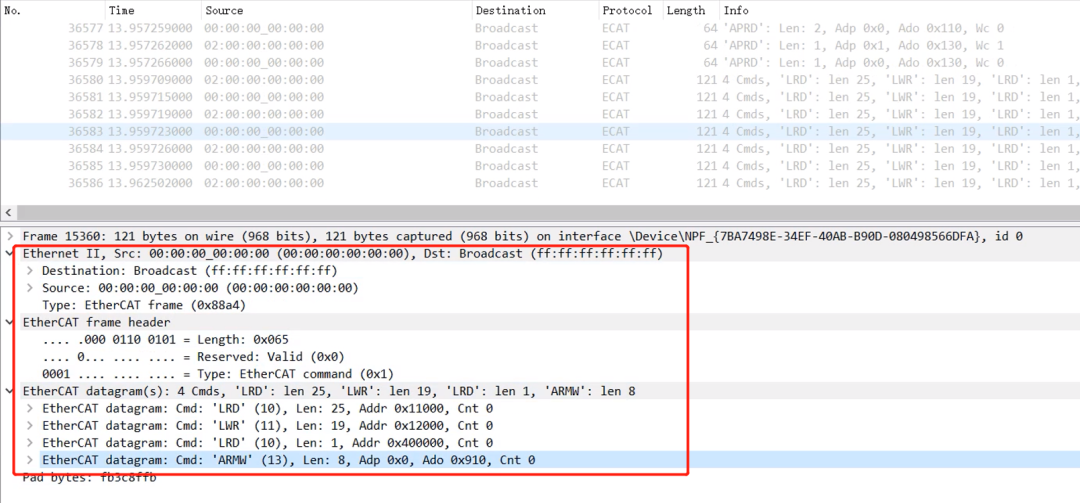
wireshark解析协议
定位主从通讯问题
上位机连接上EtherCAT分析仪,软件映射虚拟网卡,轻松查看主从初始化交互信息,获取从站配置参数,掌握各厂家协议差异,解决适配难题;还可通过实时拓扑,判断是否为“设备丢帧”、“设备不处理数据”、“设备断开连接”等问题。
解析协议
定位主从通讯问题
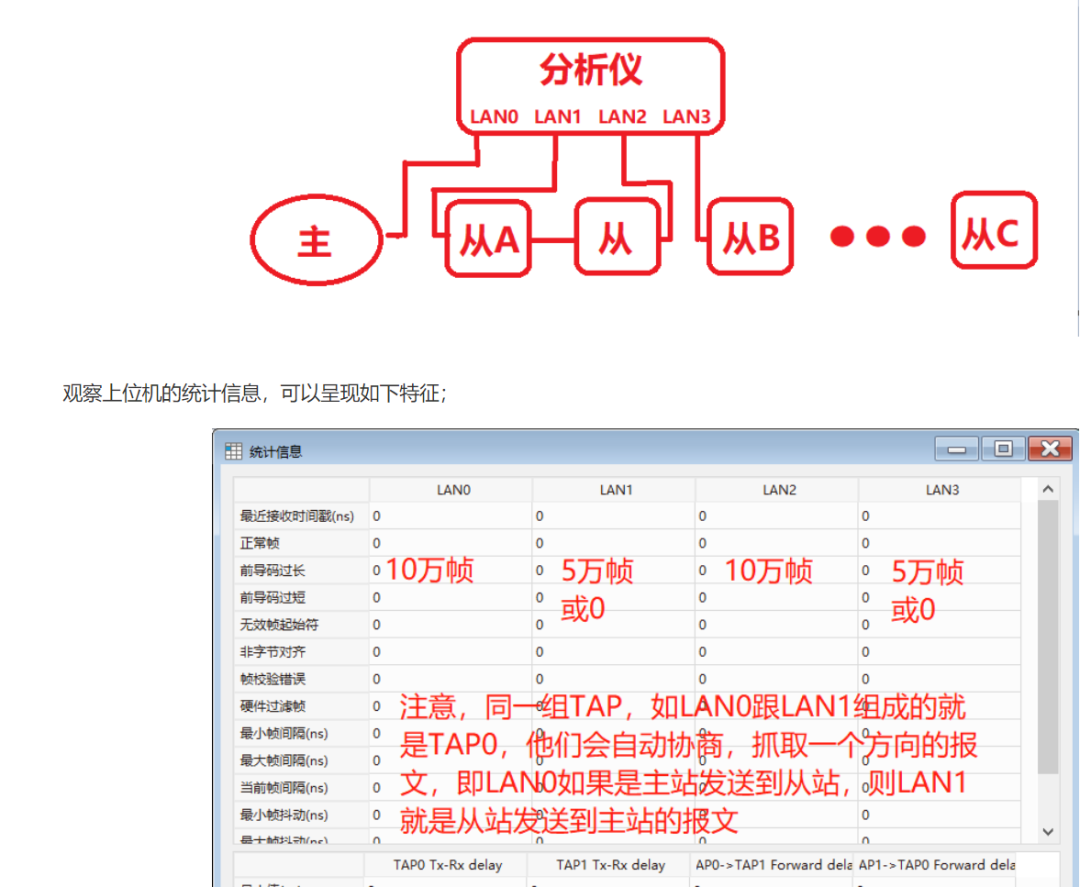
全面统计
便于诊断
上位机连接上EtherCAT分析仪,支持查看四个端口的正常帧、错误帧、帧间隔、帧抖动、转发延时、网络延时等统计信息。
支持GPIO事件捕获
满足网络同步分析需求
设备支持GPIO事件监控、抓取从站DC中断信号,从而调整合适的偏移时间。
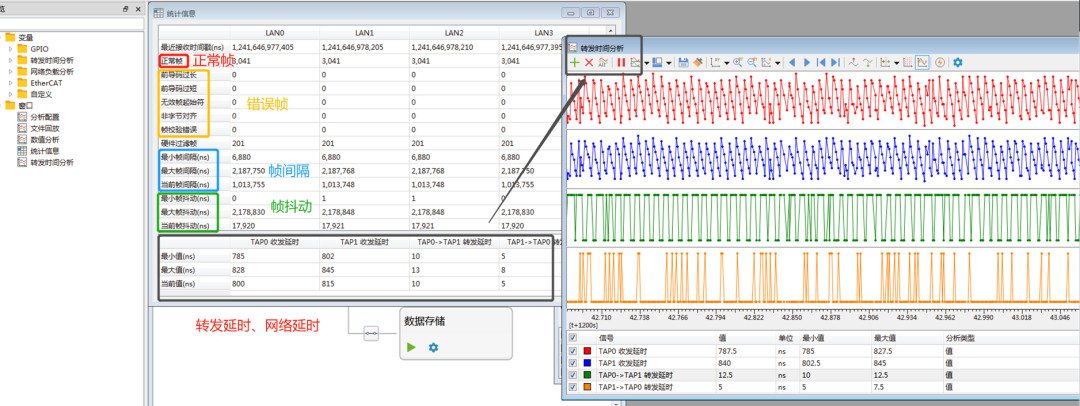
<1ns的转发延迟
精准评估主站周期
EtherCAT分析仪支持四个端口的帧转发时间分析,在多节点的EtherCAT网络中,不影响实际通信,精准分析主站实际PDO周期与抖动。
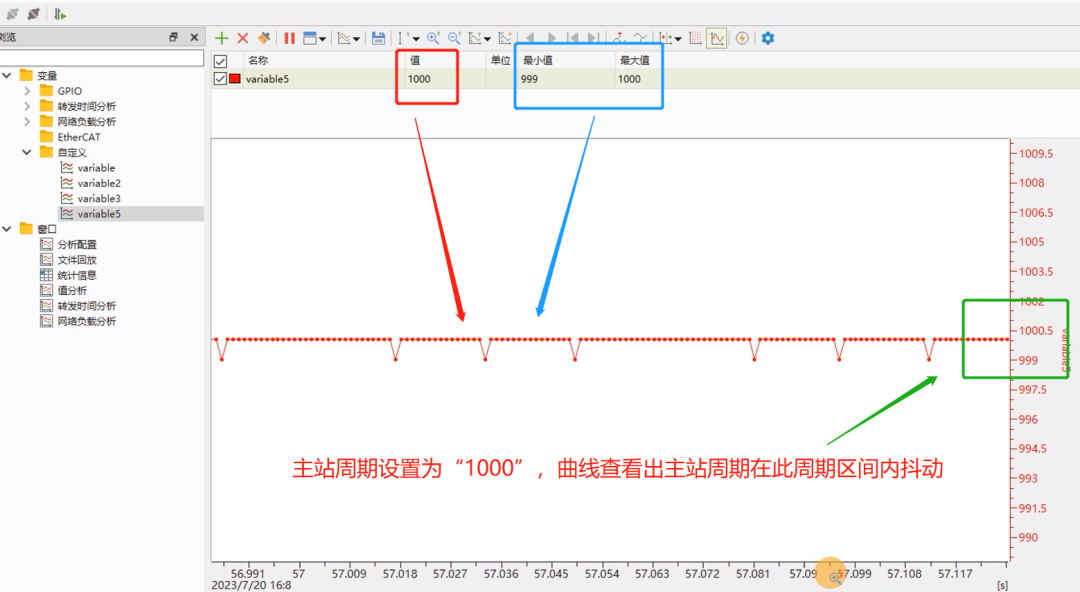
分析PDO周期
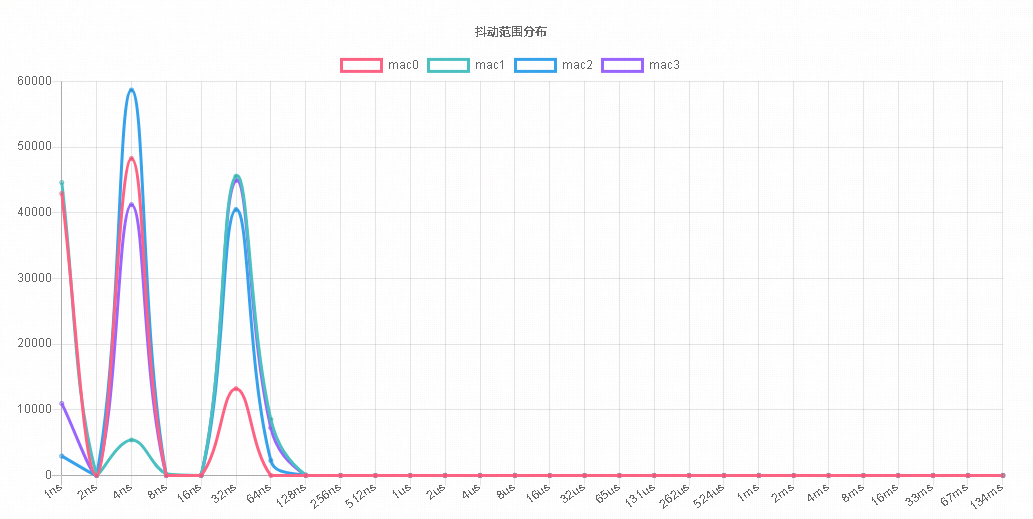
抖动分析
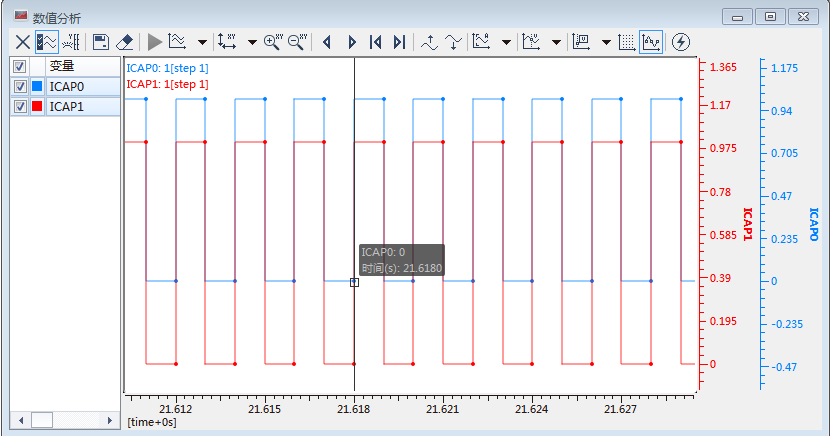
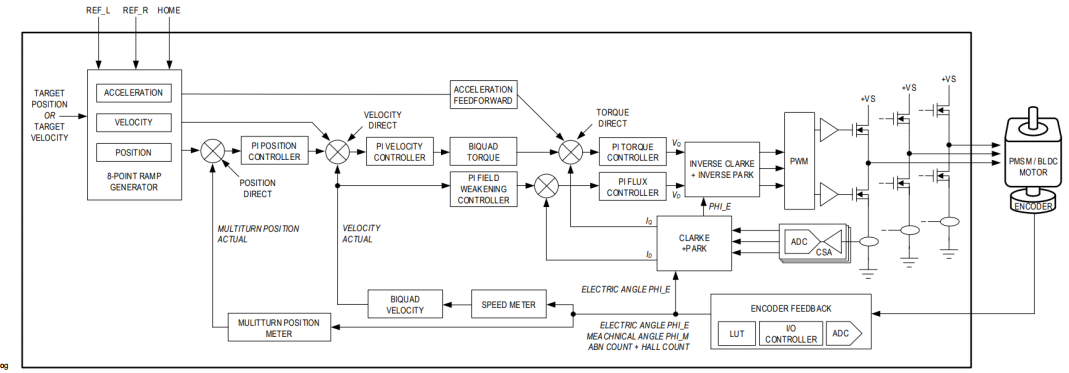
直观的数值曲线
轻松判断从站执行效率
EtherCAT分析仪支持帧内数值曲线分析,支持按帧偏移和任意扩展协议解析数值,人形机器人各关节电机和算法的跟随曲线分析,找到机械或算法性能瓶颈。
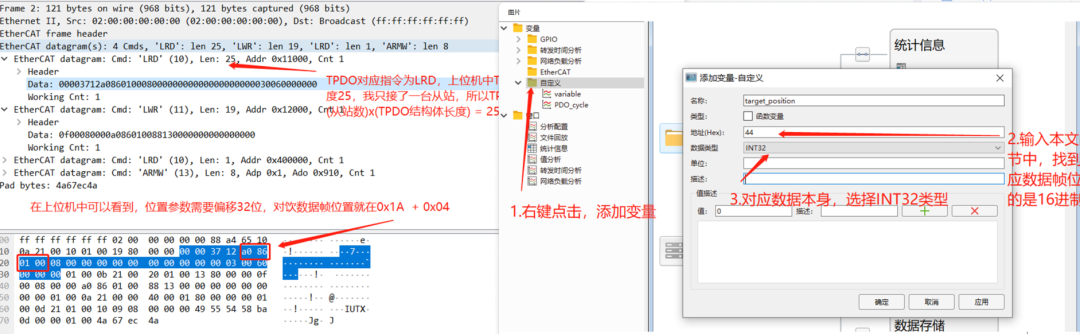
Wireshark确认PDO,上位机添加变量
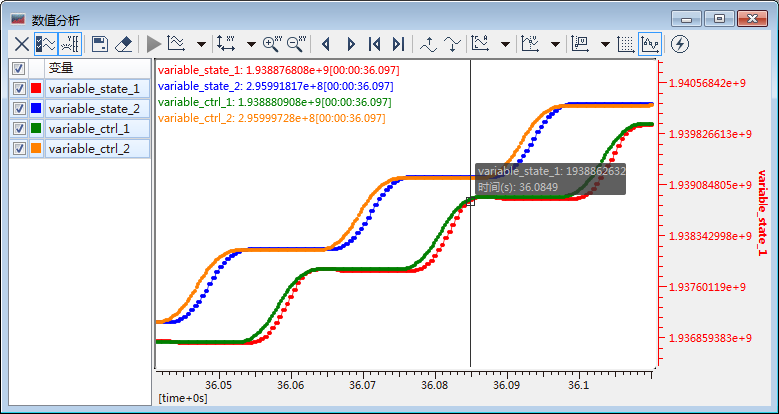
上位机显示曲线
(主从站输出曲线贴合度越高,从站执行效率越高)
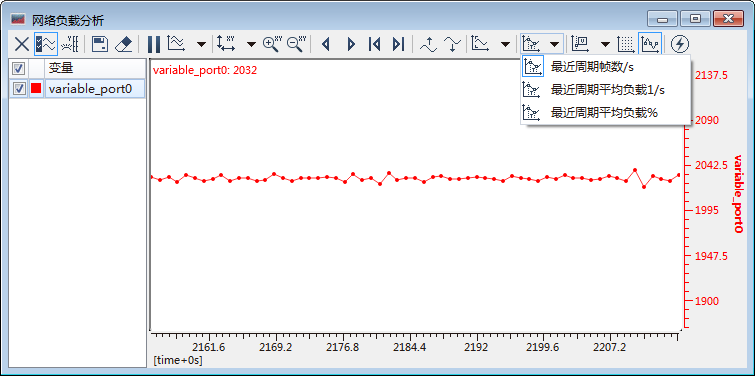
网络负载监测
实时掌握节点帧流量
EtherCAT分析仪支持对指定数据源进行网络负载分析,同时支持设置过滤,可针对某个PDO进行帧流量分析。
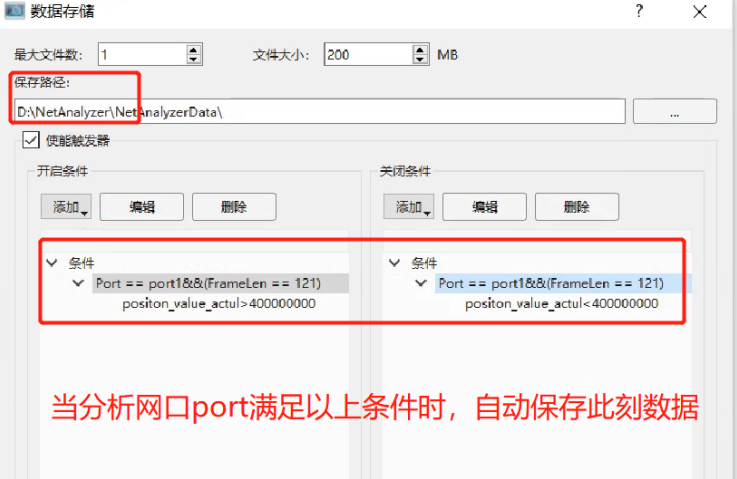
触发保存
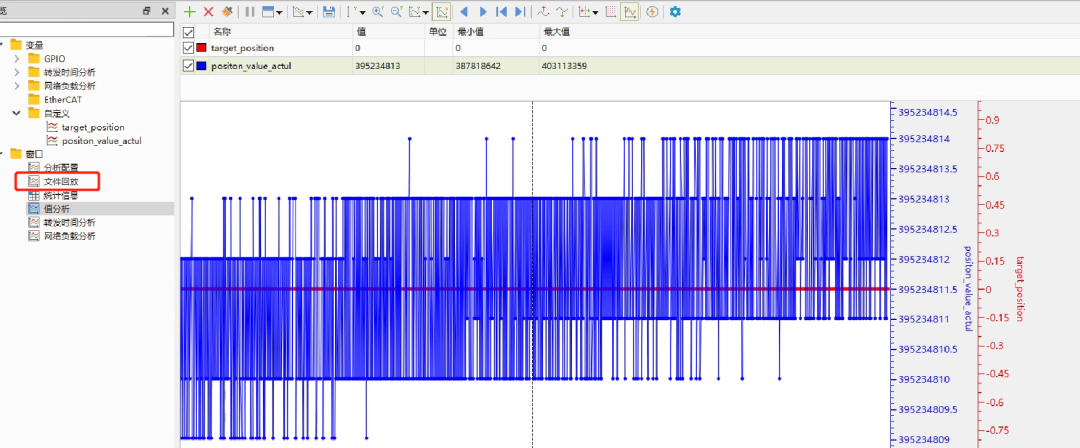
数据回放
上位机配置触发条件,达到相应条件时候,上位机自动保存相关数据至相关路径;过后支持将保存的数据通过上位机重新回放分析。
触发保存
数据回放
搭配ZWS物联网云平台
快速实现系统智能化升级
基于致远电子自主研发的ZWS物联网云平台,可以帮您的系统实现智能化升级,支持远程固件升级、日志文件快速召回、业务数据监控、组态可视化呈现、海量数据分析等功能。
-
机器人
+关注
关注
213文章
29829浏览量
213636 -
以太网
+关注
关注
41文章
5706浏览量
176473 -
数据
+关注
关注
8文章
7261浏览量
92232 -
总线
+关注
关注
10文章
2962浏览量
89907
发布评论请先 登录
提升人形机器人运动能力,需要把控运动关节哪些关键参数?

纳芯微磁传感器技术推动人形机器人性能提升

ADI如何重塑人形机器人运动核心
NVIDIA 通过云端至机器人计算平台驱动人形机器人技术,赋能物理 AI

破解数据与泛化难题,通用人形机器人研发全面提速

借助OpenUSD与合成数据推动人形机器人发展
EtherCAT科普系列(4):EtherCAT技术在人形机器人灵巧手领域应用

基于IMX219和IWR6843ISK的人形机器人毫米波雷达感应和传感器融合

GaN FET在人形机器人中的应用






 工商网监
工商网监
评论