 提升人形机器人运动能力,需要把控运动关节哪些关键参数?
提升人形机器人运动能力,需要把控运动关节哪些关键参数?

人形机器人,也称为仿生人形机器人。一般认为是应当具有类人的外观、感知、决策、行为和交互能力,可以在生活、工作场景内如人类一般完成外界感知、自主运动、行为交互等一系列任务的机器人。
近年来,全球主要发达国家纷纷加强人形机器人的研发与产业布局。工信部发布的《人形机器人创新发展指导意见》中提到:人形机器人有望成为继计算机、智能手机、新能源汽车后的颠覆性产品,深刻变革人类生产生活方式,重塑全球产业格局。
据相关预测,中国人形机器人市场规模2026 年达到104.71 亿元,2029年达到750 亿元,到 2035年有望达到3000亿元规模。
相比传统工业机器人,人形机器人需要非常多的自由度,所用到的活动关节也大大增加。这些关节零部件的制造能力,也成了机器人运动能力提升的关键。
这些关节包括无刷直流伺服电机、空心杯电机、行星减速器、谐波减速器、滚珠丝杠等。总体而言,电机、减速器、丝杠则是人形机器人关键运动的关键组成部件。
因此,在生产制造中,如何控制这三大零部件的关键尺寸与参数,都尤为关键。
本期推文,小优博士结合优可测在协助企业进行关键零件把控经验来介绍一下。
/电机
在电机制造中,企业会关注电机磁性瓦片的尺寸,矽钢片尺寸,转子轴的尺寸。

电机磁性瓦片尺寸测量-闪测仪FM系列
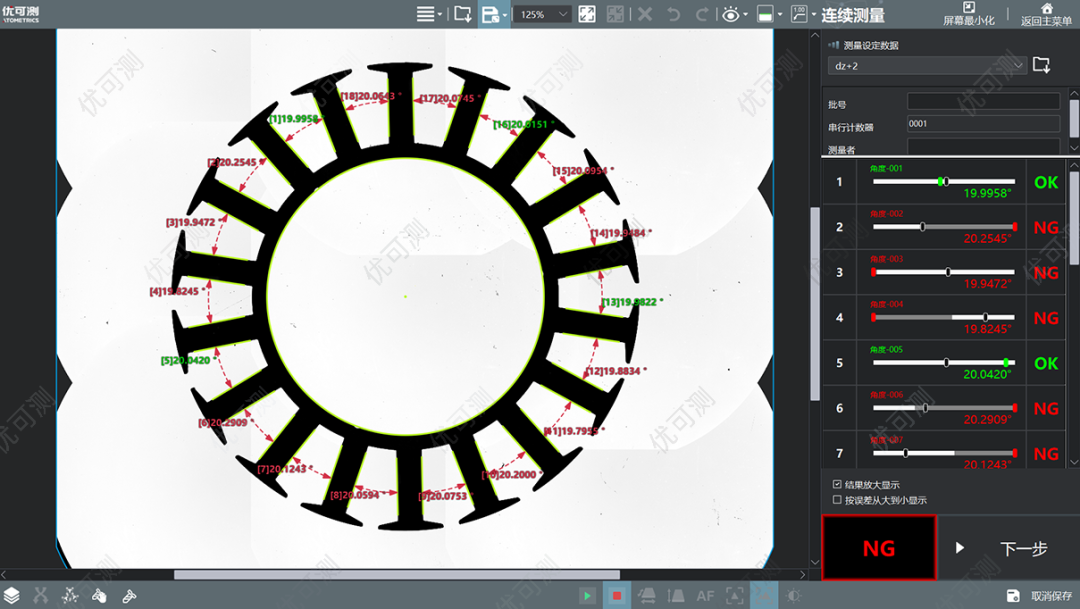
矽钢片尺寸测量-闪测仪FM系列
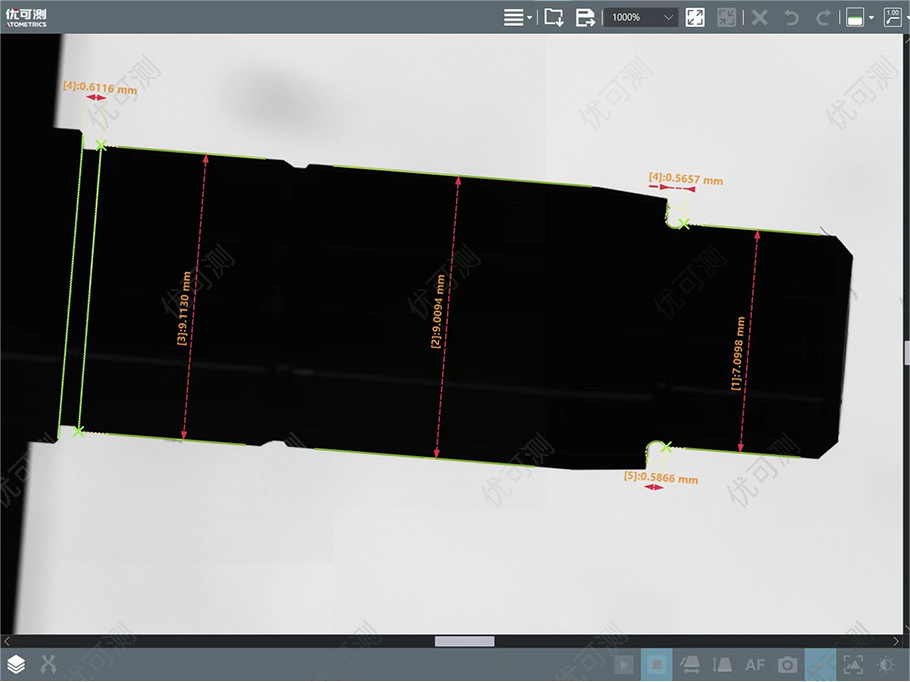
电机轴承尺寸测量-闪测仪FM系列
在有刷电机上,企业也会通过显微镜对碳刷进行失效性分析。
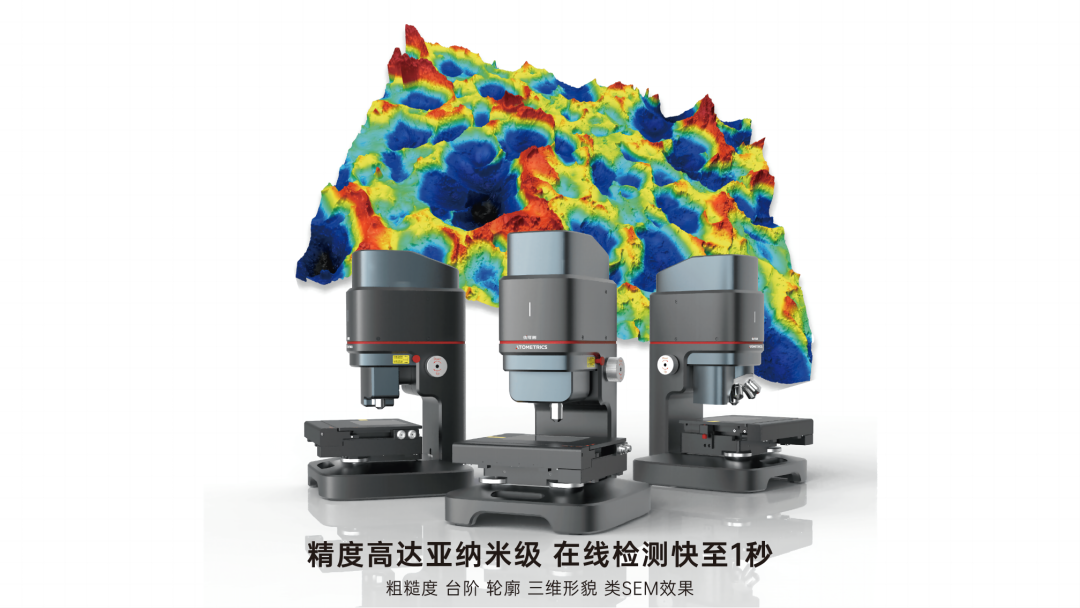
对于一些精密电机,企业甚至会选择白光干涉仪,对碳刷与换向器的接触面进行分析,控制两侧的粗糙度,从而降低磨损,减低噪音,提升碳刷的寿命。
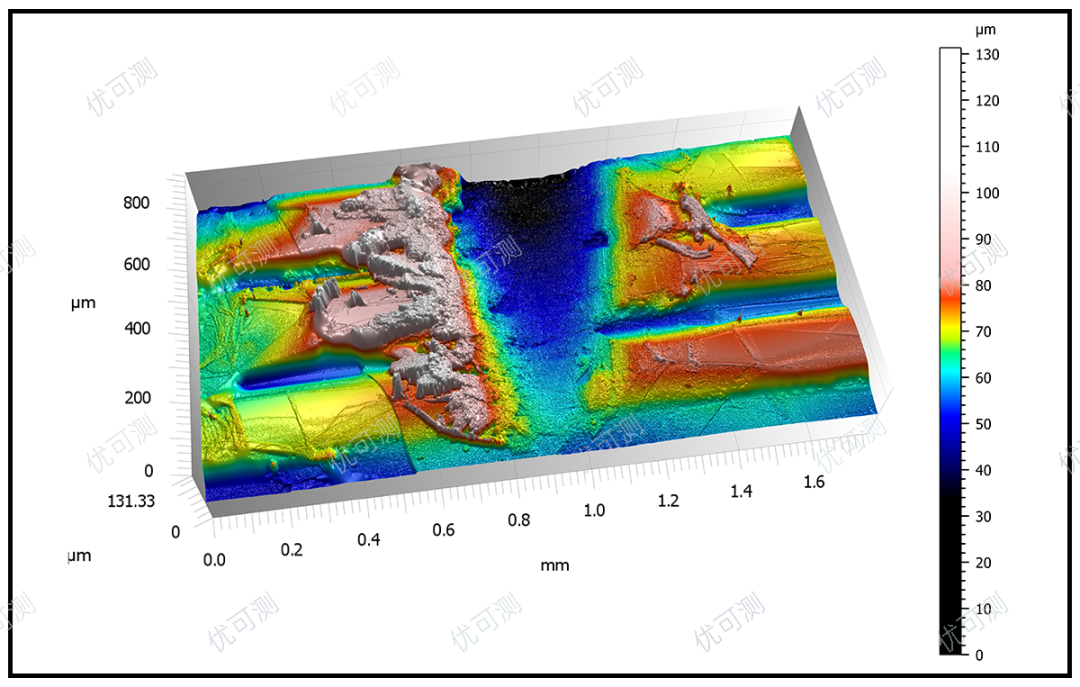
碳刷磨损体积-白光干涉仪AM系列
在交流电机制造中,企业同样会使用大倍率的显微镜,对定子线圈的绕线进行失效性分析、表面缺陷分析等。

电机线路焊锡失效性分析-超景深显微镜AH系列
灵巧手上会部署多个精密的空心杯电机,这些电机在制造中,厂家也会关注外壳、磁钢、霍尔传感器的尺寸,并会采购闪测仪这类的设备,对这些零部件的尺寸进行在线抽检,或者全检。
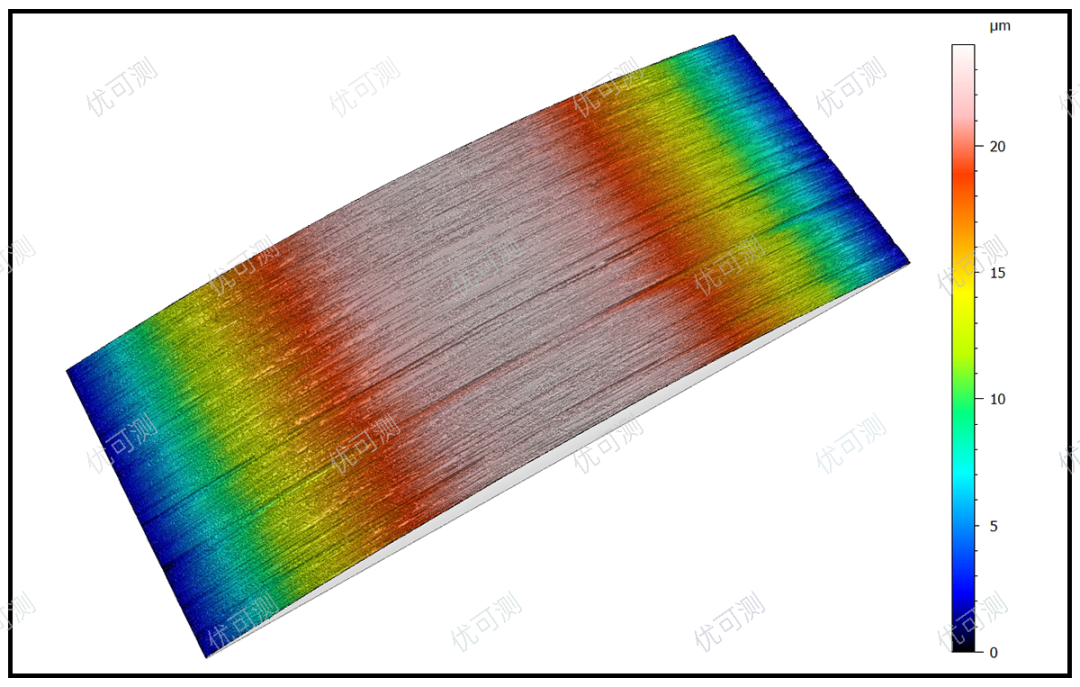
在伺服电机中,对电机转动角度控制的“磁栅编码器”,也是制造企业重点关注的对象。有些企业会采购白光干涉仪,对编码器的激光槽高度、表面粗糙度、磁高度进行把控。部分高精密的编码器,表面粗糙度管控甚至要达到纳米级。
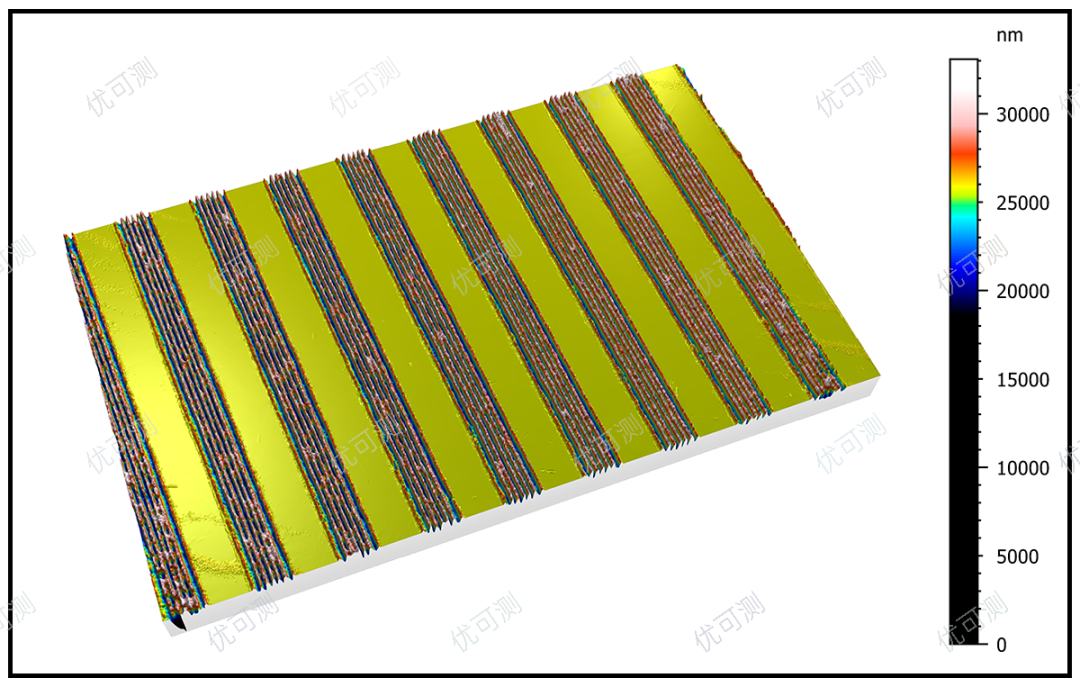
磁栅编码器微观形貌测量-白光干涉仪AM系列
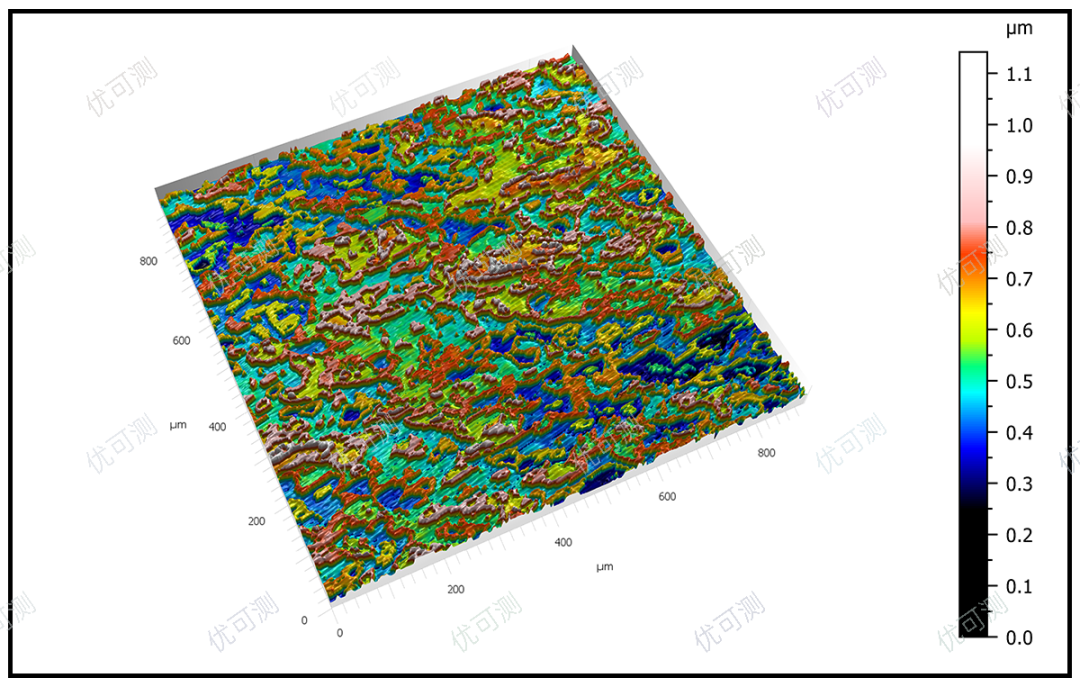
磁栅编码器粗糙度测量-白光干涉仪AM系列
在一些高速电机中,厂家也会关注轴的轴跳动,利用能检测微小跳动的光谱共焦传感器来进行测量。
/减速器
在减速器中,很多都配置了磁栅编码器或者光栅编码器。这些编码器的尺寸与表面粗糙度,同样需要进行管控。
在减速器与电机共同组成的运动关节模组中,一般会包含多个齿轮,如行星齿轮、减速器内齿轮等。为了减少齿轮啮合阻力,降低摩擦,提升运动关节寿命,厂家会对齿轮、轴、套尺寸;传动轴的轴跳动;齿轮啮合面粗糙度进行管控。在这些管控环节,白光干涉仪、闪测仪、线激光传感器、高倍率超景深显微镜都是比较常见的检测设备。
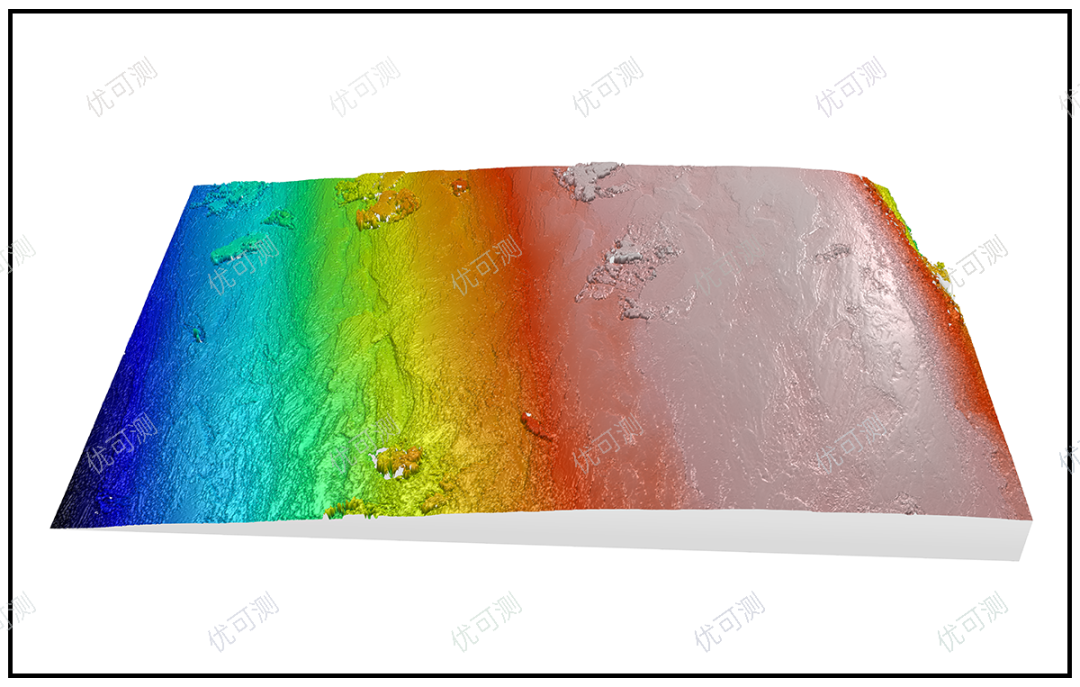
行星齿轮粗糙度测量-白光干涉仪AM系列
减速器齿轮磨损分析-白光干涉仪AM系列
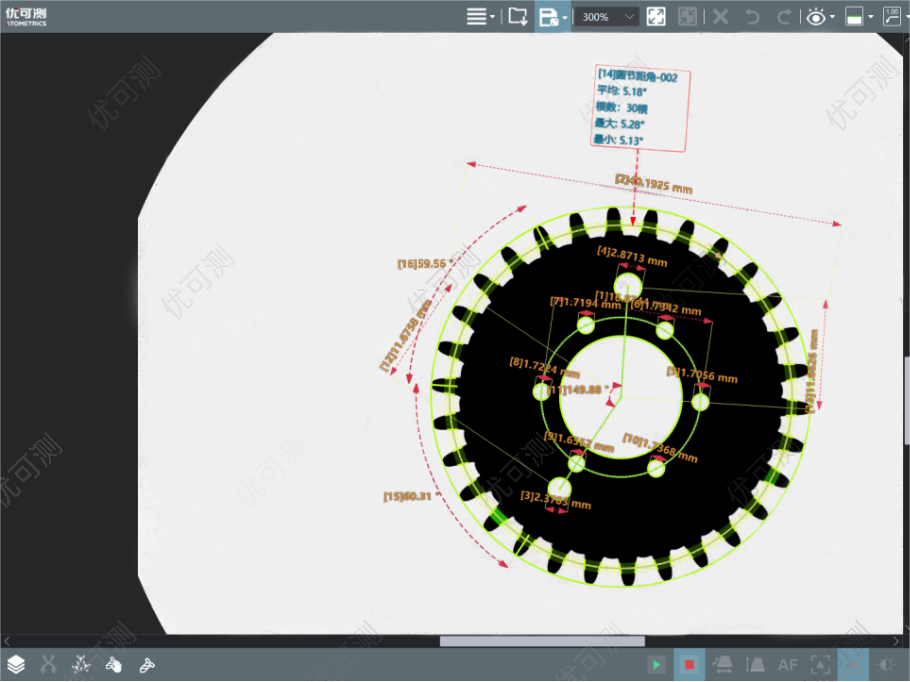
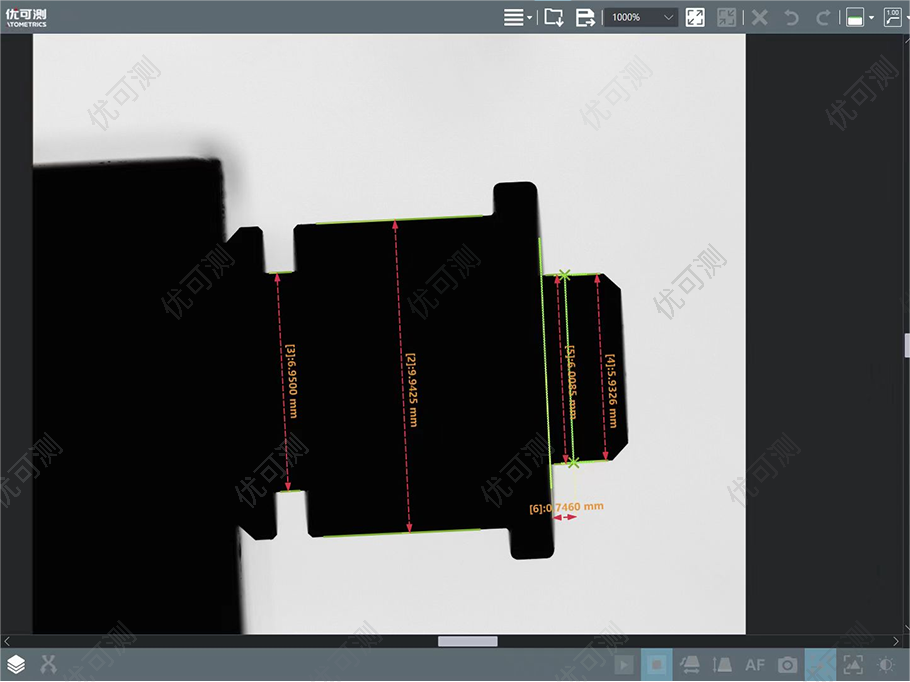
减速器齿轮测量-闪测仪FM系列
/丝杆
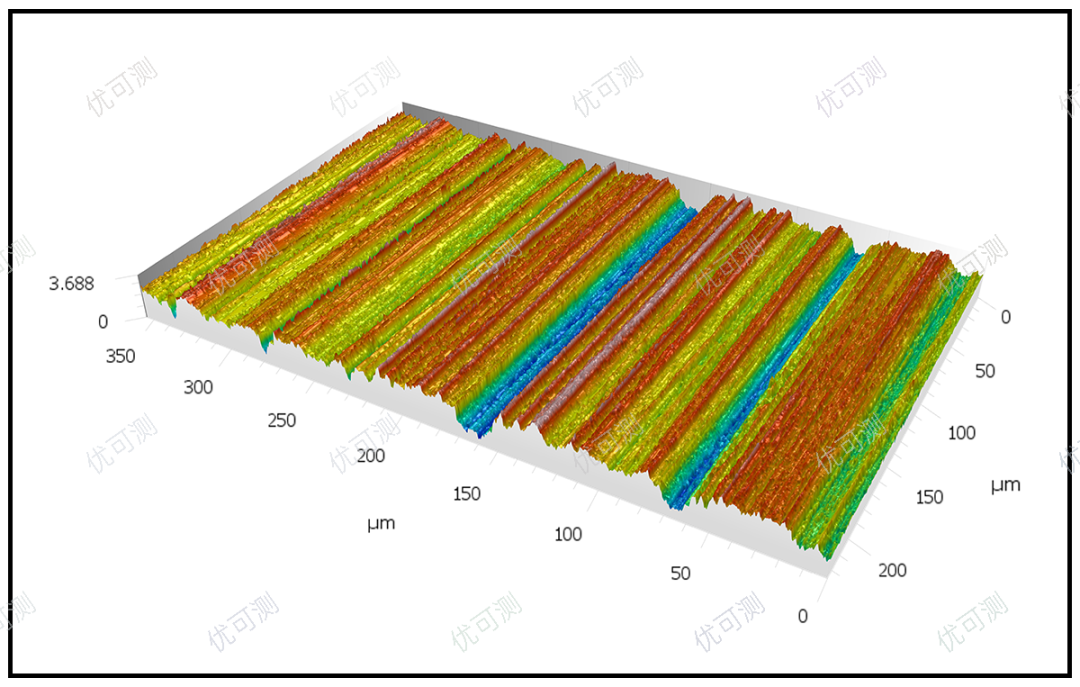
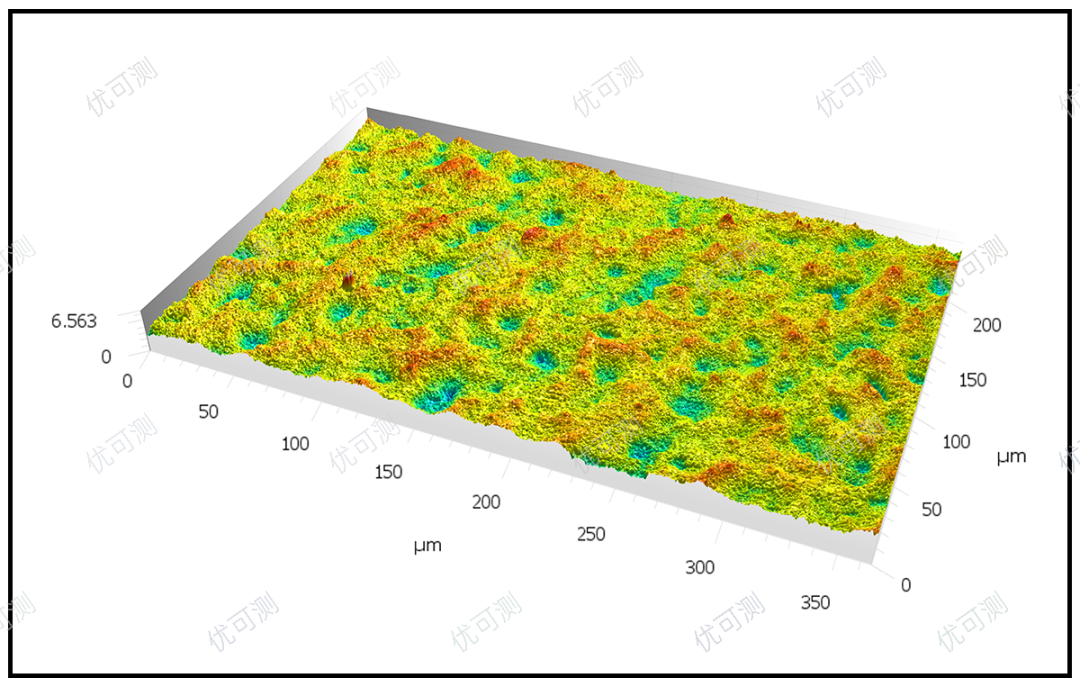
目前部分人形机器人的运动关节会采用到如滚珠丝杠的直线运动方案。如特斯拉的擎天柱机器人的手部就包含了12个行星滚珠丝杠结构,腿部包含了14个行星滚珠丝杠。行星滚珠丝杠结构要降低运动噪音,提升运动效率,需要精密磨床进行加工,同样也需要高精度白光干涉仪等测量设备,对轴、丝杠轴跳动,以及齿轮啮合面粗糙度进行精密管控。
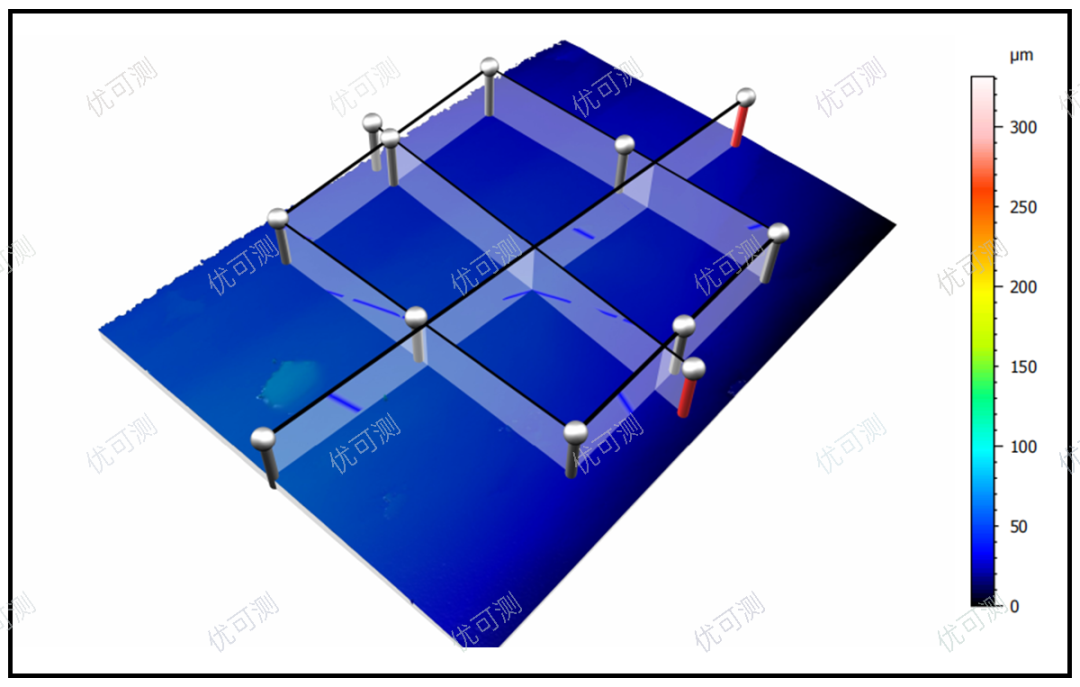
滚珠丝杠宽齿表面粗糙度测量-白光干涉仪AM系列
丝杆螺纹斜面形貌分析-白光干涉仪AM系列
白光干涉仪AM系列

一键影像测量仪FM系列

超景深显微镜AH系列
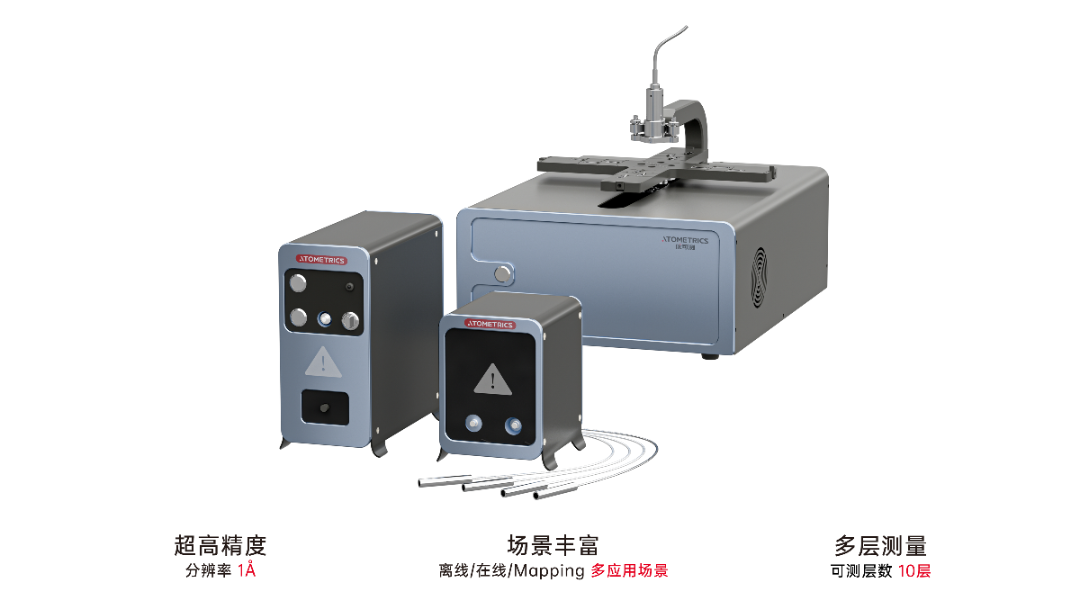
薄膜厚度测量仪AF系列
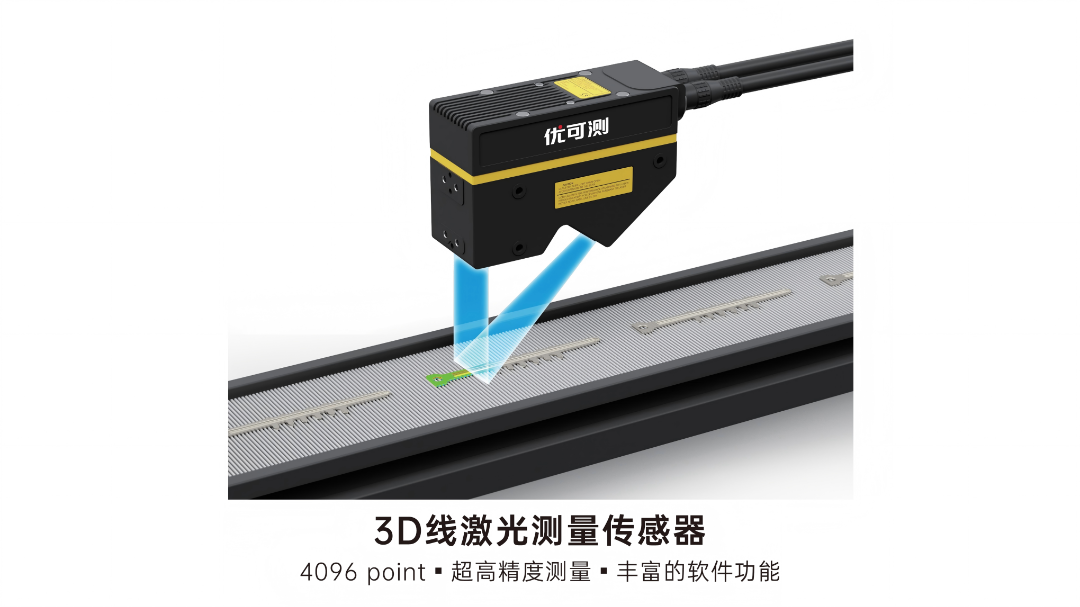
3D线激光传感器AR系列
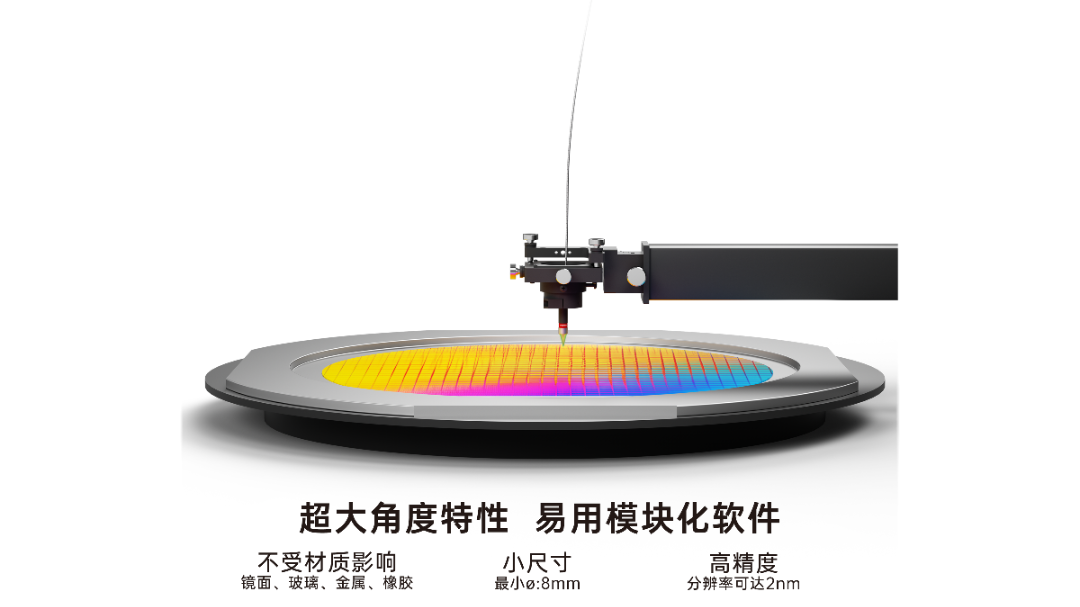
光谱共焦位移传感器AP系列
激光位移传感器SL系列
3D线光谱共焦传感器AS系列
晶圆厚度/TTV/翘曲自动测量设备APS系列

-
人形机器人
+关注
关注
7文章
750浏览量
17673 -
白光干涉仪
+关注
关注
0文章
180浏览量
2649
发布评论请先 登录

LabVIEW的六轴工业机器人运动控制系统
人形机器人设计中,哪些关键部位需要功率器件?典型电压/电流参数如何设计?
HCTL-2020 解码器及其在多关节机器人运动控制中的应用
推荐!蓝牙心率运动手环/MTK定位电话手表/人形街舞机器人开发文档资料
关于可穿戴型下肢助力机器人感知系统研究
高动态人形机器人“夸父”通过OpenHarmony 3.2 Release版本兼容性测评
为什么使用减速器代替电机转速来控制机器人关节运动?
中科本原推出面向人形机器人的关节电机解决方案





 工商网监
工商网监
评论