 KUKA»úĆ÷ČËĘÓľőץȡµÄą¤×÷ÔŔí
KUKA»úĆ÷ČËĘÓľőץȡµÄą¤×÷ÔŔí

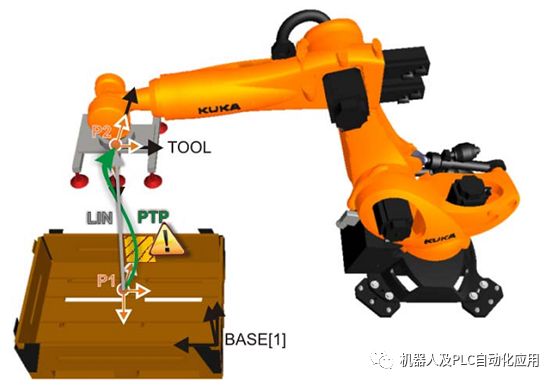
Ę×ĎČŇŞ˝¨Á˘»úĆ÷Č˵Ĺ켣,×÷ÎŞ»ů´ˇ»úĆ÷Č˱ŕłĚąěĽŁ.
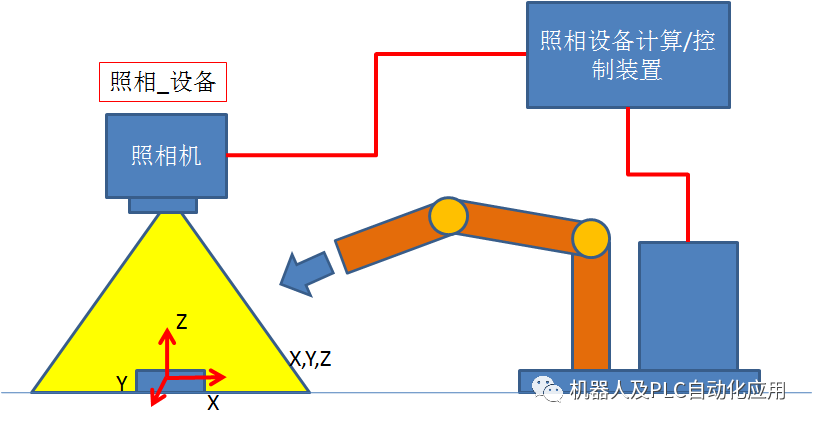
ĘÓľőץȡÖ÷ŇŞĘÇͨąý¸Ä±ä»úĆ÷Č˵ÄTOOL×ř±ęϵ»ňBASE×ř±ęϵŔ´ĘµĎÖµÄ.
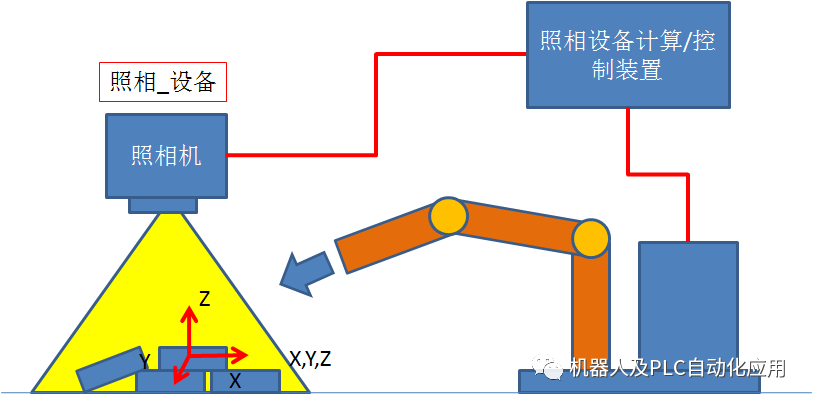
ÎďĚĺλÖõı仯Ö÷ŇŞĘÇËüλÖõÄX,Y,Z ·˝ĎňµÄ±ä»Ż.
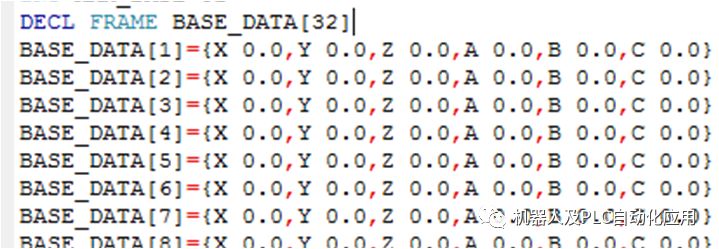
BASE×ř±ęϵ:żÉ¸ůľÝĐčŇŞ¶¨ŇĺÓĂ»§×ř±ęϵˇŁ µ±»úĆ÷ČËĹ䱸¶ŕ¸öą¤×÷̨ʱŁ¬ŃˇÔńÓĂ»§×ř±ęϵżÉĘą˛Ů×÷¸üÎŞĽňµĄ ˇŁÔÚÓĂ»§×ř±ęϵÖĐŁ¬ TCP µă˝«ŃŘÓĂ»§×Ô¶¨ŇĺµÄ×ř±ęÖá·˝ĎňÔ˶ŻˇŁ
ŇԸıäBASE ×ř±ęϵΪŔý:
KUKAC4 ĎÖÔÚżÉŇÔĘąÓĂ32¸öBASE ×ř±ęϵ
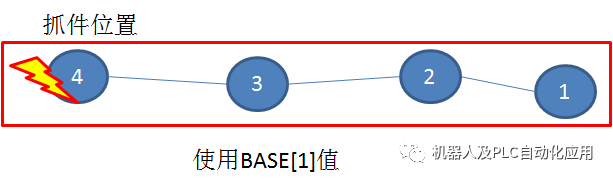
Ă»ÓĐĘąÓĂĘÓľő˛ąłĄą¦ÄÜʱ,Ö»ÓĂŇ»¸öBASE×ř±ęϵ.
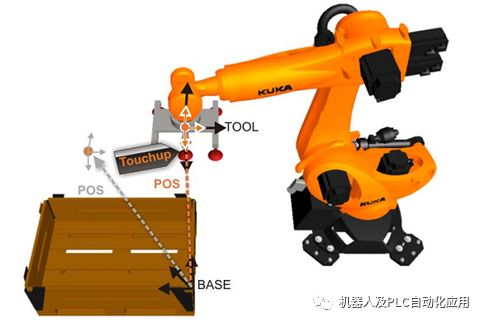
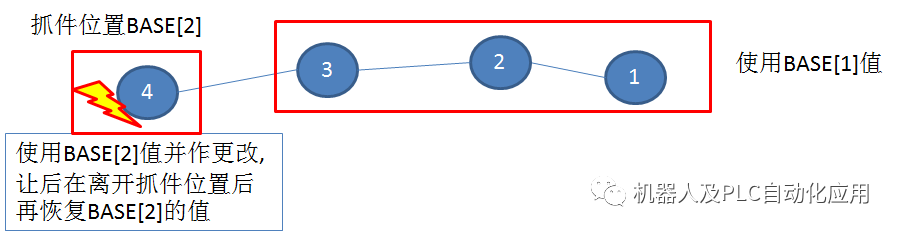
¸Ä±ä»úĆ÷ČËBASE×ř±ęϵֵ´Ó¶ř¸Ä±ä»úĆ÷ČËץĽţλÖĂ,ĘąÓöŕ¸ö×ř±ęϵ.
ÉóşË±ŕĽŁşĚŔč÷şě
ÉůĂ÷Łş±ľÎÄÄÚČÝĽ°ĹäÍĽÓÉČëפ×÷Őß׫д»ňŐßČëפşĎ×÷ÍřŐľĘÚȨתÔءŁÎÄŐ¹۵ă˝ö´ú±í×÷Őß±ľČËŁ¬˛»´ú±íµç×Ó·˘ÉŐÓŃÍřÁ˘łˇˇŁÎÄŐÂĽ°ĆäĹäÍĽ˝öą©ą¤łĚʦѧϰ֮ÓĂŁ¬ČçÓĐÄÚČÝÇÖȨ»ňŐßĆäËűÎĄąćÎĘĚ⣬ÇëÁŞĎµ±ľŐľ´¦ŔíˇŁ
ľŮ±¨Í¶Ëß
-
»úĆ÷ČË
+ąŘע
ąŘע
213ÎÄŐÂ
29829äŻŔŔÁż
213644 -
TCP
+ąŘע
ąŘע
8ÎÄŐÂ
1405äŻŔŔÁż
81296 -
KUKA
+ąŘע
ąŘע
3ÎÄŐÂ
218äŻŔŔÁż
17019
ÔÎıęĚ⣺KUKA »úĆ÷ČËĘÓľőץȡµÄą¤×÷ÔŔíĽ°Ethernet KRLČíĽţżŘÖĆ˝˛˝â
ÎÄŐÂłö´¦ŁşˇľÎ˘Đźţşgh_a8b121171b08Ł¬Î˘ĐĹą«Öںţş»úĆ÷ČËĽ°PLC×Ô¶Ż»ŻÓ¦Óáż»¶ÓĚíĽÓąŘעŁˇÎÄŐÂתÔŘÇëעĂ÷łö´¦ˇŁ
·˘˛ĽĆŔÂŰÇëĎČ µÇÂĽ
ĎŕąŘÍĆĽö
ČȵăÍĆĽö
»úĆ÷ČËĘÓľőˇŞˇŞ»úĆ÷Č˵ġ°ŃŰľ¦ˇ±
´óÁżµÄ±ŕłĚʱĽäŁ¬˝ř˛˝Éú˛úЧÂʺͼӹ¤ÖĘÁżˇŁ ÎŇąúĘÓľő»úĆ÷ČËÓ¦ÓĂÖ÷ŇŞÓĐŇÔĎÂÄżµÄŁşÓĂŇÔ´úĚćČËŔŕ´ÓĘÂÎŁĎŐˇ˘ÓĐş¦şÍ¶ńÁÓ»·ľłˇ˘ł¬ľ»»·ľłĎµĹ¤×÷Ł»°ŃČË´Ó°ąÔࡢ·±ÖصÄŔͶŻÖĐ˝â·ĹłöŔ´Ł»˝ř˛˝ŔͶŻÉú˛úÂĘŁ¬¸Ä
·˘±íÓÚ 01-23 15:02
KUKAÖŘĐÍ»úĆ÷ČË
Őâ¸öĘÇKUKAÖŘĐÍ»úĆ÷ČË´¦ŔíşÍ˛âÁż»ěÄýÍÁąěŐíµÄĘÓƵˇŁ´¦ŔíµĂĎŕµ±ľ«Ď¸ˇŁŐćĐÄÖµµĂ°®şĂ»úĆ÷ŐߺͰ®ąúŐßŃĐľżŃĐľżˇŁ
·˘±íÓÚ 02-03 15:18
ą¤Ňµ»úĆ÷Č˵Ť×÷ÔŔí
ĎÖÔÚąă·şÓ¦Óõ帽ӻúĆ÷Č˶ĽĘôÓÚµÚŇ»´úą¤Ňµ»úĆ÷ČËŁ¬ËüµÄ»ů±ľą¤×÷ÔŔíĘÇĘľ˝ĚÔŮĎÖˇŁĘľ˝ĚҲłĆµĽŇýŁ¬Ľ´ÓÉÓĂ»§µĽŇý»úĆ÷ČËŁ¬Ň»˛˝˛˝°´ĘµĽĘČÎÎń˛Ů×÷Ň»±éŁ¬»úĆ÷ČË
·˘±íÓÚ 12-15 10:25
KUKA»úĆ÷ČËÎĘĚâ˝â´đ
1 żŞ»ú×ř±ęϵÎŢЧ ĘŔ˝ç×ř±ęϵĘÇŇÔǹͷΪ»ůµăŁ¬ÔÚŐâÖÖ×ř±ęϵÖĐ»úĆ÷ČËËůÓеĶŻ×÷¶ĽĘÇ°´ŐŐŇÔǹͷΪ¶ĄµăŔ´ÍęłÉŇƶŻŁ¬XYZ·˝ĎňÇиîÇą·˝Ďň˛»¸Ä±äŁ¬Čçąű»úĆ÷ČËÔÚĘŔ˝ç×ř±ęϵÖĐŇƶŻŁ¬ÇąÍ·Ň˛Ëćןı䷽ĎňŁ¬ÄÇľÍĘÇÎŇĂÇÔÚ
·˘±íÓÚ 07-15 07:48
ˇľMYD-CZU3EGżŞ·˘°ĺĘÔÓĂÉęÇ롿»ůÓÚ»úĆ÷ĘÓľőµÄą¤Ňµ»úĆ÷ČËץȡą¤×÷Őľ
ĎîÄżĂűłĆŁş»ůÓÚ»úĆ÷ĘÓľőµÄą¤Ňµ»úĆ÷ČËץȡą¤×÷ŐľĘÔÓĂĽĆ»®ŁşÉęÇëŔíÓɱľČËĘÇĽÎĐËĽĽĘ¦Ń§Ôş˝ĚʦŁ¬Őă˝»úĆ÷ČË
·˘±íÓÚ 09-18 14:18
ˇľČđо΢RK1808ĽĆËă°ôĘÔÓĂÉęÇ롿»ůÓÚ»úĆ÷ĘÓľőµÄą¤Ňµ»úĆ÷ČËץȡą¤×÷Őľ
ĎîÄżĂűłĆŁş»ůÓÚ»úĆ÷ĘÓľőµÄą¤Ňµ»úĆ÷ČËץȡą¤×÷ŐľĘÔÓĂĽĆ»®ŁşÉęÇëŔíÓÉ ±ľČËĘÇĽÎĐËĽĽĘ¦Ń§Ôş˝ĚʦŁ¬Őă˝»úĆ÷ČË
·˘±íÓÚ 09-18 19:24
ą¤Ňµ»úĆ÷ČËÓëĘÓľőʵѵƽ̨˝éÉÜ
ˇ˘×ĄČˇˇ˘×°Ĺ䡢ČëżâµČѵÁ·Ł¬2ˇ˘ą¤Ňµ»úĆ÷ČËÓëĘÓľőʵѵƽ̨°üş¬Áů×ÔÓɶȹ¤Ňµ»úĆ÷Čˡ˘ÖÇÄÜĘÓľőĽě˛âϵͳˇ˘PLCżŘÖĆϵ
·˘±íÓÚ 07-01 06:38
»úĆ÷ČË°áÔËÂë¶âą¤×÷Őľ˝éÉÜ
ZNRGZ-4»úĆ÷ČË°áÔËÂë¶âą¤×÷վһˇ˘˛úĆ·¸ĹĘöZNRGZ-4»úĆ÷ČË°áÔËÂë¶âą¤×÷ŐľŇÔą¤Ňµ»úĆ÷ČËÓë»úĆ÷
·˘±íÓÚ 07-01 08:20
KUKA»úĆ÷ČËËĹ·ţÇý¶ŻÄŁżéάĐŢ
KUKAżâż¨C4»úĆ÷ČËÇý¶ŻĆ÷ąĘŐϱ¨ľŻÎ¬Đ޿⿨»úĆ÷ČËάĐŢÄÚČÝ°üŔ¨żâż¨»úĆ÷ČËĘľ˝ĚĆ÷άĐŢŁ¬KUKAËĹ·ţÇý¶ŻÄŁżéάĐŢŁ¬żâż¨
·˘±íÓÚ 09-17 07:09
KUKA»úĆ÷ČËĘÓľőץȡµÄą¤×÷ÔŔí˝˛˝â
BASE×ř±ęϵ: żÉ¸ůľÝĐčŇŞ¶¨ŇĺÓĂ»§×ř±ęϵˇŁ µ±»úĆ÷ČËĹ䱸¶ŕ¸öą¤×÷̨ʱŁ¬ŃˇÔńÓĂ»§×ř±ęϵżÉĘą˛Ů×÷¸üÎŞĽňµĄ ˇŁÔÚÓĂ»§×ř±ęϵÖĐŁ¬ TCP µă˝«ŃŘÓĂ»§×Ô¶¨ŇĺµÄ×ř±ęÖá·˝ĎňÔ˶ŻˇŁ
KUKA»úĆ÷ČËĘÓľőץȡµÄą¤×÷ÔŔíĽ°Ethernet KRLČíĽţżŘÖĆ˝˛˝â
BASE×ř±ęϵ: żÉ¸ůľÝĐčŇŞ¶¨ŇĺÓĂ»§×ř±ęϵˇŁ µ±»úĆ÷ČËĹ䱸¶ŕ¸öą¤×÷̨ʱŁ¬ŃˇÔńÓĂ»§×ř±ęϵżÉĘą˛Ů×÷¸üÎŞĽňµĄ ˇŁÔÚÓĂ»§×ř±ęϵÖĐŁ¬ TCP µă˝«ŃŘÓĂ»§×Ô¶¨ŇĺµÄ×ř±ęÖá·˝ĎňÔ˶ŻˇŁ
KUKA»úĆ÷ČËĘÓľőץȡµÄą¤×÷ÔŔí
BASE×ř±ęϵ: żÉ¸ůľÝĐčŇŞ¶¨ŇĺÓĂ»§×ř±ęϵˇŁ µ±»úĆ÷ČËĹ䱸¶ŕ¸öą¤×÷̨ʱŁ¬ŃˇÔńÓĂ»§×ř±ęϵżÉĘą˛Ů×÷¸üÎŞĽňµĄ ˇŁÔÚÓĂ»§×ř±ęϵÖĐŁ¬ TCP µă˝«ŃŘÓĂ»§×Ô¶¨ŇĺµÄ×ř±ęÖá·˝ĎňÔ˶ŻˇŁ
·˘±íÓÚ 09-16 15:35
?925´ÎÔĶÁ
dz̸»úĆ÷ČËĘÓľőץȡµÄÄżµÄ
»úĆ÷ČËĘÓľőץȡµÄÄżµÄĘÇĘąÓĂŇ»¸ö»úеĘÖÄŁĐÍ(°üŔ¨¶ţÖ¸»ň¶ŕÖ¸ĽĐצŁ¬ÎüĹ̵Č)Ł¬ŇÔRGB»ňRGBDĎŕ»ú˛ÉĽŻµÄłˇľ°ÍĽĎńÎŞĘäČëĽĆËăłöŇ»¸ö×îÓŵÄץȡλ×ËŁ¬Ęą»úеĘÖÔÚ¸Ăλ×ËĎÂżÉŇÔÎȶ¨µŘ
·˘±íÓÚ 03-30 10:19
?919´ÎÔĶÁ
»ůÓÚĘÓľőµÄ»úĆ÷ČËץȡϵͳÉčĽĆ
ץȡ×ۺϷ˝·¨ĘÇ»úĆ÷ČËץȡÎĘĚâµÄşËĐÄŁ¬±ľÎÄ´ÓץȡĽě˛âˇ˘ĘÓľőËĹ·ţşÍ¶ŻĚ¬×ĄČˇµČ˝Ç¶Č˝řĐĐĚÖÂŰŁ¬ĚáłöÁ˶ŕÖÖ

»ůÓÚĘÓľőµÄ×ÔÖ÷µĽş˝ŇƶŻ×ĄČˇ»úĆ÷Č˴·˝°¸
ľąýŇÔÉ϶ÔŇƶŻ×ĄČˇ»úĆ÷ČËϵͳĎęϸµÄĆĘÎöŁ¬ÎŇĂÇżÉŇÔÖŞµŔŇƶŻ×ĄČˇ»úĆ÷ČËϵͳ˛˘˛»ĘÇĽňµĄµÄˇ°¶ŃÁϡ±Ł¬¶řĘÇŇÔŇƶŻµ×Ĺ̵ÄÖÇÄÜ·ľ¶ąć»®ˇ˘ĘÓľőʶ±đˇ˘ŇƶŻµ×ĹĚ
·˘±íÓÚ 12-19 15:09
?1092´ÎÔĶÁ





 ą¤ÉĚÍřĽŕ
ą¤ÉĚÍřĽŕ
ĆŔÂŰ