 KUKA机器人视觉抓取的工作原理讲解
KUKA机器人视觉抓取的工作原理讲解

首先要建立机器人的轨迹,作为基础机器人编程轨迹.
视觉抓取主要是通过改变机器人的TOOL坐标系或BASE坐标系来实现的.
物体位置的变化主要是它位置的X,Y,Z 方向的变化.
BASE坐标系:可根据需要定义用户坐标系。 当机器人配备多个工作台时,选择用户坐标系可使操作更为简单 。在用户坐标系中, TCP 点将沿用户自定义的坐标轴方向运动。
以改变BASE 坐标系为例:
KUKAC4 现在可以使用32个BASE 坐标系
没有使用视觉补偿功能时,只用一个BASE坐标系.
改变机器人BASE坐标系值从而改变机器人抓件位置,使用多个坐标系.
制作一个后台程序,用来改变BASE
设置 输入变量点的接收变量:
SIGNAL gxe_1 $in[2278] TO $in[2285]
SIGNAL gxe_2 $in[2286] TO $in[2301]
SIGNAL gxe_3 $in[2302] TO $in[2309]
SIGNAL gxe_4 $in[2310] TO $in[2325]
SIGNAL gxe_5 $in[2334] TO $in[2341]
SIGNAL gxe_6 $in[2342] TO $in[2357]
设置坐标变量用于改变BASE坐标值
DECL FRAME Get_Val_Pos={X 0.0,Y 0.0,Z 0.0,A 0.0,B 0.0,C 0.0} ;
DECL FRAME Get_Val_Pos1={X 0.0,Y -46.2999992,Z 0.0,A 0.0,B 0.0,C 0.0} ;
DECL FRAME Get_Val_Pos2={X 0.0,Y -17.8699989,Z 0.0,A 0.0,B 0.0,C 0.0} ;
使多个BASE[]坐标系保持一致
base_Data[1] = $base
base_Data[2] = base_data[1]
base_Data[3] = base_data[1]
base_Data[4] = base_data[1]
变量的初始化归0, get_val_pos = $nullframe
例如: 现在只改变BASE的Y方向位置
get_val_pos.y = gxe_2*0.01 换算坐标值,存到坐标的Y方向.
base_data[1] = $base : Get_Val_Pos 改变BASE坐标系的Y方向位置
使用多个BASE坐标系:
-
机器人视觉
+关注
关注
0文章
51浏览量
10323 -
KUKA
+关注
关注
3文章
218浏览量
17020
原文标题:"奇兵"视觉识别抓取教学.KUKA 机器人视觉抓取的工作原理讲解
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
工业机器人的特点
详细介绍机场智能指路机器人的工作原理
【「# ROS 2智能机器人开发实践」阅读体验】视觉实现的基础算法的应用
大象机器人携手进迭时空推出 RISC-V 全栈开源六轴机械臂产品
富唯智能最小复合机器人的强大抓取实力?

复合机器人抓取精度的影响因素及提升策略
库卡KUKA机器人常见故障维修
名单公布!【书籍评测活动NO.58】ROS 2智能机器人开发实践
【「具身智能机器人系统」阅读体验】2.具身智能机器人的基础模块
语音识别机器人的工作原理
解锁机器人视觉与人工智能的潜力,从“盲人机器”改造成有视觉能力的机器人(上)

智能移动机器人

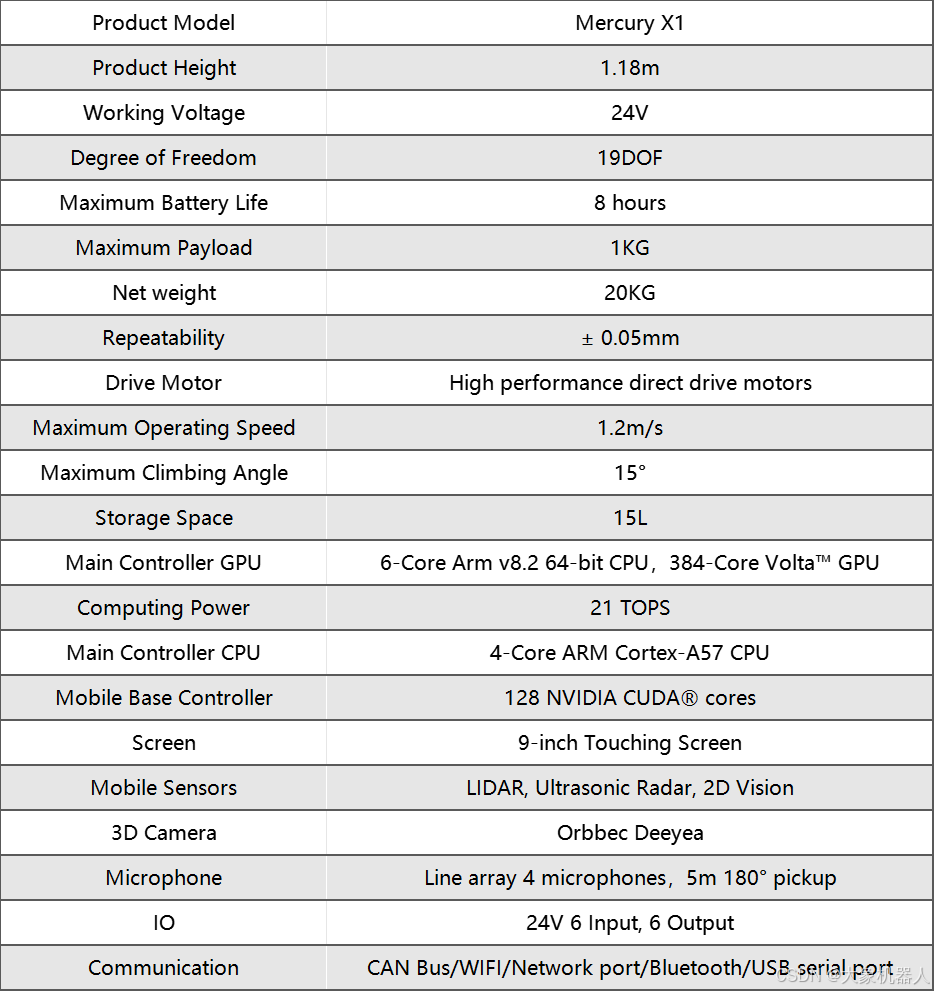
水星Mercury X1轮式人形机器人结合openc算法&STag标记码视觉系统实现精确抓取!





 工商网监
工商网监
评论