 智能机器人视觉传感器的技术原理
智能机器人视觉传感器的技术原理

能视觉传感技术下的智能视觉传感器也称智能相机,是近年来机器视觉领域发展最快的一项新技术。智能相机是一个兼具图像采集、图像处理和信息传递功能的小型机器视觉系统,是一种嵌入式计算机视觉系统。它将图像传感器、数字处理器、通讯模块和其他外设集成到一个单一的相机内,由于这种一体化的设计,可降低系统的复杂度,并提高可靠性。同时系统尺寸大大缩小,拓宽了视觉技术的应用领域。
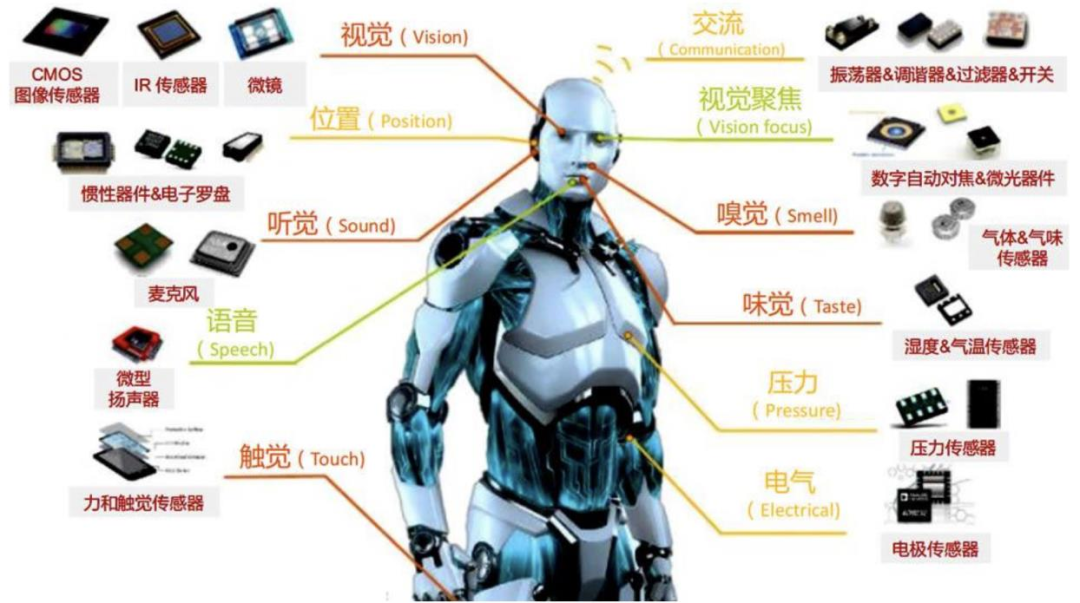
关于机器人视觉传感器传感技术是现金机器人的三大要素(感知、决策和动作)之一,工业机器人根据完成的任务不同,配置的传感器类型和规格也不同。通常根据用途的不同,机器人传感器可以分为两大类:用于检测机器人自身状态的内部传感器和用于检测机器人相关环境参数的外部传感器。今天分享的内容是,机器人外部传感器中的---视觉传感器,也就是机器人的“眼镜”。
机器人有“眼睛”,这对于我们来说,是非常重要的。人类从外界获得的东西大多数是由眼镜得到的,人类视觉细胞的数量是人类听觉细胞数量的三千多倍,是皮肤感觉细胞的100多倍。如果要赋予机器人较高级的智能,机器人必须通过视觉系统更多的获取周围世界的信息。例:机器人视觉的典型应用:焊接机器人用视觉系统进行作业定位视觉系统导引机器人进行喷涂作业搬运机器人用视觉系统导引电磁吸盘抓取工件。
机器人的视觉必须能理解三维空间的信息,即机器人的视觉与文字识别或者图像识别是有区别的,需要进行三维图像的处理。因为视觉传感器只能得到二维图像,从不同角度上看同一物体,得到的图像也不同;光源的位置不同,得到的图像的明暗程度与分布也不同。为此,人们采取了很多措施来解决这个问题,并且为了减轻视觉系统的负担,尽可能地完善外部环境条件,加强视觉系统本身的功能和使用较好的方法进行信息处理。1、视频摄像头2、光电转换器件(CCD传感器、MOS图像传感器)3、PSD传感器4、形状识别传感器5、工业机器人视觉系统(工业机器人视觉系统的基本原理、利用视觉识别抓取工件的工业机器人系统)
机器人的“眼睛”实际上“看不到”任何东西。只是机器人被嵌入了视觉传感器。能够扫描周围环境,判断是否有障碍物。遇到人类或障碍物的时候机器人能够减速或停止。随着越来越多的机器人进入工厂车间,它的安全问题仍然是一个主要关注问题。机器人和安全相辅相成。你不能在没有减轻伤害风险的情况下进行人机协作。如果您的机器人正在操纵锋利的对象,那么在没有采取保护性安全措施的情况下,其旁边有一个人是不安全的。另一种情况是机器人是否正在处理重物,如果物体掉落或以特定速度成为射弹,则会造成伤害。为了让人们在这些机器人周围感到安全,我们需要了解机器人接下来要做什么。低成本,自动化是真正的机器人。工厂通过添加机器人,使工厂能够以相同数量的人实现更高的产出,以最低的成本,达到最高的生产效率。结合机器人与自主移动机器人,增强现实,可穿戴设备和其他先进技术,以配备智能,数字化工厂,你有一个娱乐的前进的自动化制造的未来。未来,机器人将与人类团队携手合作,共同提高效率和生产力。
作者:运控伺服
-
机器人
+关注
关注
213文章
29829浏览量
213613
发布评论请先 登录
人形机器人感知革命!创新形态机器视觉传感器涌现

工业机器人的特点
0.01°微小变化精准捕捉,机器人姿态传感器革新

详细介绍机场智能指路机器人的工作原理
【「# ROS 2智能机器人开发实践」阅读体验】视觉实现的基础算法的应用
【「# ROS 2智能机器人开发实践」阅读体验】+内容初识
【「具身智能机器人系统」阅读体验】2.具身智能机器人的基础模块
【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型
【「具身智能机器人系统」阅读体验】1.初步理解具身智能
【「具身智能机器人系统」阅读体验】+初品的体验
《具身智能机器人系统》第1-6章阅读心得之具身智能机器人系统背景知识与基础模块
一文讲透人形机器人常用的四类感知传感器:视觉、力/力矩、触觉、IMU






 工商网监
工商网监
评论