 机器人视觉抓取问题出现的原因和解决方法
机器人视觉抓取问题出现的原因和解决方法

最近视觉抓件系统一直会出现抓取零件不到位的问题.下面我将分析一下问题出现的原应.
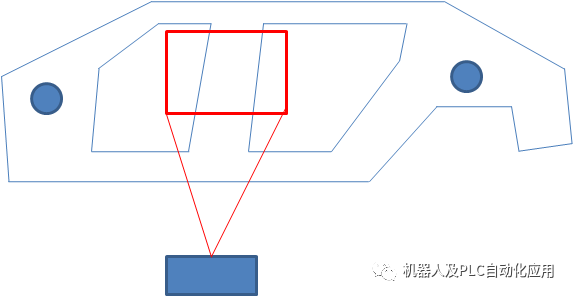
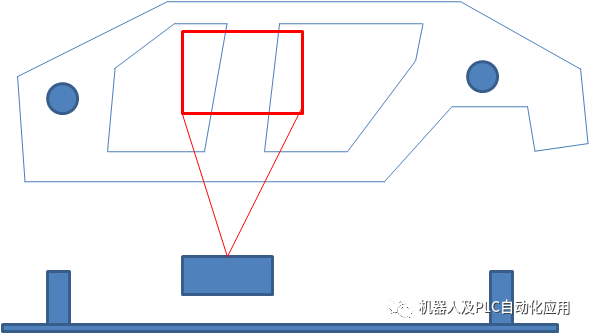
单相机测点,测量车身侧围外板B /内板B,计算出的车身整体偏差值是B柱的旋转和变化量.因此对于车身整体的变化量存在偏差.零件大的组装件容易出现这种问题.因此要区分对待侧围内板和侧围外部的抓取视觉的计算方法.
1.车身侧围内板:
应设置两个相机对应机器人抓手上的定位销附近,计算两个定位空的偏差值.由于机器人抓手是固定的所以,要计算出两空的变化对应车身坐标系的整体变化值.这样计算出的机器人BASE坐标系下的偏差值最准确,机器人的抓取效果最好。
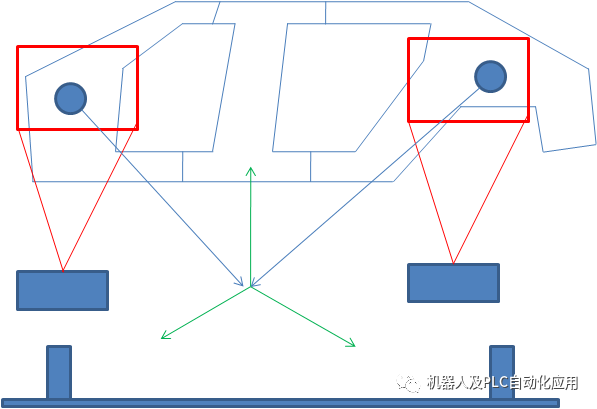
如果机器人抓手不使用定位销定位,则可以使用一个相机的方法进行粗略抓取,问题会很少。
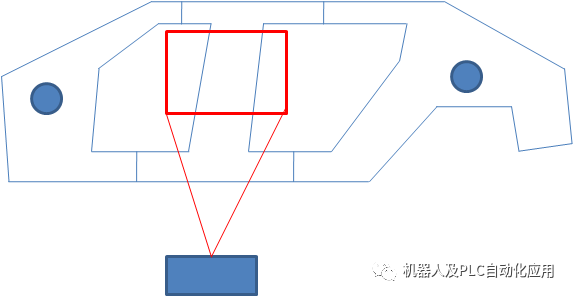
2.车身侧围外板:
侧围外板是一个整体件,用一个相机照车身B柱是没有问题的.整体大件由于不需要搭接工艺,因此可以使用一个相机和定位销定位抓取的方法.
审核编辑:郭婷
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
213文章
29977浏览量
214665 -
相机
+关注
关注
4文章
1492浏览量
54841
原文标题:机器人视觉抓取问题分析
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
工业机器人的特点
的基础,也是三者的实现终端,智能制造装备产业包括高档数控机床、工业机器人、自动化成套生产线、精密仪器仪表、智能传感器、汽车自动化焊接线、柔性自动化生产线、智能农机、3D 打印机等领域。而智能制造装备中工业
发表于 07-26 11:22
盘点#机器人开发平台
地瓜机器人RDK X5开发套件地瓜机器人RDK X5开发套件产品介绍 旭日5芯片10TOPs算力-电子发烧友网机器人开发套件 Kria KR260机器人开发套件 Kria KR260-
发表于 05-13 15:02
【「# ROS 2智能机器人开发实践」阅读体验】视觉实现的基础算法的应用
部署,详细介绍了基于颜色阈值和深度学习的巡线方法。
二维码识别则广泛应用于机器人定位与任务触发,例如AGV(自动导引车)的路径规划。
深度学习在机器人视觉中的崛起
书中重点介绍了Y
发表于 05-03 19:41
大象机器人携手进迭时空推出 RISC-V 全栈开源六轴机械臂产品
识别联调。
进迭时空致力于为智能机器人提供完整全栈优化的RISC-V AI软硬件解决方案,第一代RISC-V AI CPU芯片K1已完成AI视觉感知、AI语音处理、自动避障、路径规划、运动控制等
发表于 04-25 17:59
富唯智能最小复合机器人的强大抓取实力?
在工业自动化领域,复合机器人的身影愈发常见。但你是否好奇,最小的复合机器人能抓取多少多重?富唯智能以创新技术,给出了令人惊叹的答案,彻底颠覆我们对小身形机器人的认知。?

复合机器人抓取精度的影响因素及提升策略
复合机器人结合了移动机器人(如AGV)和机械臂的功能,广泛应用于物流、制造等领域。抓取精度是其核心性能指标之一,直接影响作业效率和产品质量。本文将探讨复合机器人
【「具身智能机器人系统」阅读体验】2.具身智能机器人的基础模块
,一次生成深度信息。
自主机器人定位任务的本质是对机器人自身状态的估计问题,包括位置,朝向,速度等问题。
路径规划旨在找到从起点到目标区域的路径,确保路径的可行性和最优性。路径规划方法包括变分
发表于 01-04 19:22
【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型
。
多模态融合的创新与突破
机器人控制技术的另一个重要突破在于多模态大模型的应用。相比于仅通过文字进行人机交互的传统方法,现代机器人能够融合视觉、声音、定位等多模态输入信息,为任务执行
发表于 12-29 23:04
【「具身智能机器人系统」阅读体验】+初品的体验
解决许多技术的和非技术的挑战,如提高智能体的自主性、处理复杂环境互动的能力及确保行为的伦理和安全性。
未来的研究需要将视觉、语音和其他传感技术与机器人技术相结合,以探索更加先进的知识表示和记忆模块,利用强化学习进一步优化决策过程。
发表于 12-20 19:17
BGA焊接产生不饱满焊点的原因和解决方法
BGA问题,其根本原因是焊点锡膏不足,下面深圳佳金源锡膏厂家来讲解一下原因和解决方法有哪些?一、产生原因BGA维修过程中遇到的不饱满焊点的另一个常见产生

变压器输出波形失真的原因和解决方法
变压器输出波形失真是一个复杂且常见的问题,它可能由多种因素引起,并可能对电力系统的稳定性和效率产生负面影响。以下是对变压器输出波形失真原因及解决方法的详细探讨,旨在提供全面的分析和解决方案。
解锁机器人视觉与人工智能的潜力,从“盲人机器”改造成有视觉能力的机器人(上)
正如人类依赖眼睛和大脑来解读世界,机器人也需要自己的视觉系统来有效运作。没有视觉,机器人就如同蒙上双眼的人类,仅能执行预编程的命令,容易碰撞障碍物,并犯下代价高昂的错误。这正是

智能移动机器人
富唯智能移动机器人分为复合机器人和转运机器人,搭载ICD核心控制器,实现一体化控制,最快可实现15分钟现场机器人的快速部署,无缝对接产线,配合自研2D/3D






 工商网监
工商网监
评论