 ML与传感,软硬件结合的传感技术又将升级机器人感知能力
ML与传感,软硬件结合的传感技术又将升级机器人感知能力

在传统的工业机器人里传感器的种类与数量已经不少了,压力、温度、速度等等方面都少不了传感器提供的关键数据。随着机器人的升级换代,机器人与人在同一环境里协作、合作的趋势愈发明显。不仅是在工业场景中,日常生活中机器与人类共存的案例也多了起来。这意味着机器人传感与感知的能力越来越重要。
机器人系统的性能,尤其是偏智能化的性能,在很大程度上取决于传感系统提供关键的数据,尤其是ML和AI系统开始在机器人应用中普及后。现在各种精密的传感器,再加上能够将传感器数据进行深度融合整理的系统让机器人拥有了出色的感知,机器人与人共同协作不再是不可能实现的事。
ML与AI,传感数据融合边缘化处理
机器学习ML在机器人行业流行的时间并不短,但真正开始应用还是近几年的事情,离整个行业开始广泛应用还需时日。机器深度学习分训练和推理,训练过程通常在云中离线进行,需要将大量的传感器数据反馈到神经网络中。训练完成后的AI系统可以在协作机器人中完成检测物品、识别人员等等应用。
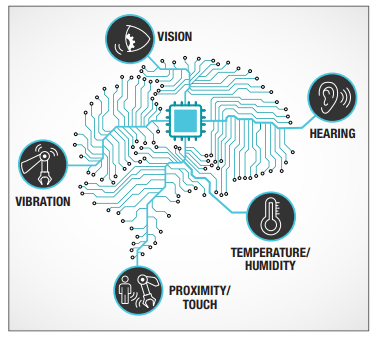
(机器人感知,TI)
在ML执行算法的推理阶段需要融合传感器数据做出判断,而且这个过程几乎是实时的,只有实时融合传感器数据做出推理才能达到机器的协作性,云计算的速度肯定是不能满足协作要求的实时低延迟响应。所以ML和AI系统需要放在边缘。
去中心化的AI模型相当依赖高集成度的处理芯片,而且必须要在底层芯片设计上就考虑好算法模型在不同场景中有限的部署条件,包括算力、功耗和硅片面积的分配。在大量的数据中筛选高质量的传感器数据并不一件容易的事情,在芯片上执行深度学习任务需要芯片的硬件传感器的持续优化。
推理引擎不仅需要丰富的外设来连接各种传感器,还需要可以支撑机器视觉算法的高性能处理能力。国产的边缘AI芯片在机器人应用上走得并不慢,不管是在移动机器人上应用广泛的地平线旭日系列,还是在机器视觉上取得突破的嘉楠勘智系列,可以看到国产芯片在性能、功耗、灵活性和成本之间找到了一个较为平衡的点。SoC也是一个不错的选择,集成式的SoC可以让单芯片的方案不局限于运行ML和AI,在整个传感器组件的融合上也能出一份力。
(勘智系列,嘉楠)
协作机器人与移动机器人融合传感技术应用
协作机器人在部署前需要预见并定义在物理空间内可能与人员之间发生的碰撞,如果考虑到激光等其他传感,在虚拟空间上同样需要预见可能出现的干扰。高水平的环境感知能力必须做到充分的冗余度,来做到快速检测并防止可能发生的碰撞。这极度依赖于各类传感器提供的大量环境数据信息,并且处理芯片能快速通过ML推理实现实时的判断。

(协作机器人,TI)
机器人内部的温湿度传感同样重要,不仅要对工作环境还要对机器人组件内部进行温湿度监控,否则电机在重负载下的发热与功耗是一大隐患。目前几乎所有用于机器人的传感器件都是温度敏感元件并且设置了热补偿,该趋势大大提升了传感应用的稳定性。
移动机器人的传感应用就更多了,定位、绘图、导航、识别每个功能都离不开传感数据的融合与处理。超声波、IMU、红外、激光雷达、毫米波雷达都是为机器人系统提供环境数据的器件,配合ML推理进行深度的环境分析,移动机器人可以达到实时感知周围任何目标的智能程度。
基于DLP技术的3DToF通过灵活的结构光在分辨率的提升上可以做到更小的尺寸,这类传感不仅能让机器在定位地图构建上更精确更深度,还能将分辨率提高数个级别,结合AI与ML能达到很高的定位精度;振动传感器这一类用于检测机器人内部器件的传感,在传感技术融合的升级过程中将预测的准确性再次做了提高;毫米波雷达更不用说,作为取代传统机器人移动传感的先进技术,在融合IMU或者GNSS后,结合ML几乎可以完成机器人移动功能的所有需求……
小结
各种精密传感器的融合只是传感技术升级的开始,现在机器学习与AI技术也开始与传感器件开始融合,对传感器数据进行汇总、筛选、训练、判断。技术与硬件深度融合的机器人传感系统开始拥有了出色的实时感知能力,在机器人行业铺开应用也许已指日可待。
-
传感器
+关注
关注
2569文章
53361浏览量
770881 -
机器人
+关注
关注
213文章
29977浏览量
214676 -
ML
+关注
关注
0文章
153浏览量
35163
发布评论请先 登录
0.01°微小变化精准捕捉,机器人姿态传感器革新

纳芯微磁传感器技术推动人形机器人性能提升

详细介绍机场智能指路机器人的工作原理
【「# ROS 2智能机器人开发实践」阅读体验】视觉实现的基础算法的应用
大象机器人携手进迭时空推出 RISC-V 全栈开源六轴机械臂产品
海伯森技术推动机器人感知能力迈向新高度
洞察:人形机器人传感器产业链概览

40个激光雷达!苹果布局机器人感知系统,让碰撞降低63.7%






 工商网监
工商网监
评论