 电子发烧友App
电子发烧友App











 创作
创作 发文章
发文章 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
描述
为什么我创建了这个
至少一个月前,我表弟说我要造一辆汽车,所以我想了很久才做出来
注意:它可以在有和没有 adafruit motor shield V2 以及有和没有射手的情况下制作。应用程序可以编辑本教程中显示了一些编辑方式。
?
工作步骤:
- 应用程序将字符串发送到蓝牙
- arduino 检查字符串
- 并采取相应的行动(正面、背面等)
?
?
?

?
1 / 3 ?设置可用蓝牙项目的选项
?
连接:
使用盾牌:
伺服 1 和 2 将保持在默认位置
电机应在 M1 和 M4
HC-05 或 06 rx 和 tx 应该匹配第 2 行:
SoftwareSerial mySerial(number of rxpinhere, numberoftxpinhere);
vcc 和 GND 到 5v 和 GND
无盾:
伺服 1 和 2:
- vcc 和 GND 分别接 5v 和 GND
- 橙色针用于伺服 1 到 9 和伺服 2 到 10
motor1 应该在 2, 3
motor2 应该在 4, 5
HC-05 或 06 rx 和 tx 应该匹配第 2 行:
-
SoftwareSerial mySerial(number of rxpinhere,numberoftxpinhere);
- vcc 和 GND 分别接 5v 和 GND
代码:
带防护罩:
注意:在第 2 行第 52 和 53 号必须连接蓝牙连接顺序是 :) 快乐编码。SoftwareSerial mySerial(RX,TX);
#include
没有盾牌
注意:在第 2 行第 52 和 53 号必须连接蓝牙连接顺序是 :) 快乐编码。SoftwareSerial mySerial(RX,TX);
#include
编辑应用程序:
笔记
有一些方法可以编辑应用程序:
- 设计师
- 块(编程)
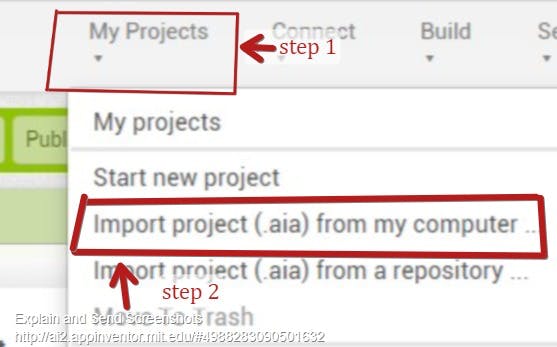
首先我们需要在http://ai2.appinventor.mit.edu上传aia(adobe in action):
?
?
?
?
1 / 3 ?单击我的项目中的导入项目
?
上传应用程序后,您可以使用设计图像等
如果你想删除拍摄,你可以简单地删除按钮。
编辑后您可以使用 2 种方法将项目导出到 apk
- 二维码
- APK到电脑
这两个选项都可以在构建选项卡中找到。
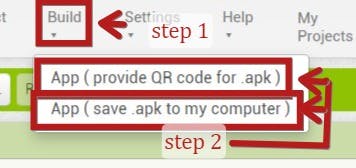
像这样
?
?
下载该资料的人也在下载
下载该资料的人还在阅读
更多 >
- 使用Arduino的简单追逐者
- 带有RT-Thread的Arduino应用程序
- Arduino蓝牙4通道中继应用程序
- Arduino/Android蓝牙串行监视器应用程序
- Arduino蓝牙8通道继电器应用程序
- 基于Arduino UNO的语音控制机器人 6次下载
- 蓝牙控制的Arduino汽车
- 我们能从互联网发明者那里学到IIoT的哪些知识?
- Arduino的实验例程之手机和蓝牙模块通讯的程序免费下载 18次下载
- 简单求余计算器应用程序免费下载 9次下载
- 蓝牙串口调试工具应用程序免费下载 43次下载
- 蓝牙串口调试电脑版应用程序免费下载 0次下载
- Arduino 1.8.5 应用程序免费下载 222次下载
- Arduino 1.8.3 应用程序免费下载 26次下载
- 《发明者电子设计宝典》Practical Electronics for Inventors 0次下载
- AWTK-WEB 快速入门(1) - C 语言应用程序 257次阅读
- PreEmptiveProtection:全面的移动应用程序保护 683次阅读
- 怎么使用uboot引导应用程序? 1545次阅读
- 聊聊PHP的web应用程序开发框架存在的漏洞有哪些 1834次阅读
- DPU编译应用程序的不同方法 1769次阅读
- DIY一个简单的Arduino板子 5703次阅读
- 如何使用Arduino Uno和HC-06实现智能手机对电灯的控制 5044次阅读
- 浅谈RAM 执行应用程序 3262次阅读
- 最简单的高性价比输液报警器电路分享 1w次阅读
- 基于Arduino UNO和HC-05蓝牙模块控制伺服电机 5094次阅读
- 开发者必备的七大工具,提升应用程序开发工作效率 3173次阅读
- 应用程序安全怎样来提供保障 1230次阅读
- 站在发明者和使用者的角度来看三极管 2828次阅读
- 晶体管是谁发明的_晶体管发明时间 3w次阅读
- 白炽灯的发明者是谁_白炽灯是爱迪生发明的吗 4.3w次阅读

 上传资料赚积分
上传资料赚积分下载排行
本周
- 1DD3118电路图纸资料
- 0.08 MB | 1次下载 | 免费
- 2AD库封装库安装教程
- 0.49 MB | 1次下载 | 免费
- 3PC6206 300mA低功耗低压差线性稳压器中文资料
- 1.12 MB | 1次下载 | 免费
- 4网络安全从业者入门指南
- 2.91 MB | 1次下载 | 免费
- 5DS-CS3A P00-CN-V3
- 618.05 KB | 1次下载 | 免费
- 6海川SM5701规格书
- 1.48 MB | 次下载 | 免费
- 7H20PR5电磁炉IGBT功率管规格书
- 1.68 MB | 次下载 | 1 积分
- 8IP防护等级说明
- 0.08 MB | 次下载 | 免费
本月
- 1贴片三极管上的印字与真实名称的对照表详细说明
- 0.50 MB | 103次下载 | 1 积分
- 2涂鸦各WiFi模块原理图加PCB封装
- 11.75 MB | 89次下载 | 1 积分
- 3锦锐科技CA51F2 SDK开发包
- 24.06 MB | 43次下载 | 1 积分
- 4锦锐CA51F005 SDK开发包
- 19.47 MB | 19次下载 | 1 积分
- 5PCB的EMC设计指南
- 2.47 MB | 16次下载 | 1 积分
- 6HC05蓝牙原理图加PCB
- 15.76 MB | 13次下载 | 1 积分
- 7802.11_Wireless_Networks
- 4.17 MB | 12次下载 | 免费
- 8苹果iphone 11电路原理图
- 4.98 MB | 6次下载 | 2 积分
总榜
- 1matlab软件下载入口
- 未知 | 935127次下载 | 10 积分
- 2开源硬件-PMP21529.1-4 开关降压/升压双向直流/直流转换器 PCB layout 设计
- 1.48MB | 420064次下载 | 10 积分
- 3Altium DXP2002下载入口
- 未知 | 233089次下载 | 10 积分
- 4电路仿真软件multisim 10.0免费下载
- 340992 | 191390次下载 | 10 积分
- 5十天学会AVR单片机与C语言视频教程 下载
- 158M | 183342次下载 | 10 积分
- 6labview8.5下载
- 未知 | 81588次下载 | 10 积分
- 7Keil工具MDK-Arm免费下载
- 0.02 MB | 73815次下载 | 10 积分
- 8LabVIEW 8.6下载
- 未知 | 65989次下载 | 10 积分





 工商网监
工商网监
评论