 电子发烧友App
电子发烧友App











 创作
创作 发文章
发文章 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
成分
|
阿杜诺纳米
?
|
× 1 |
|
定制电路板
线路板
|
× 1 |
|
?
|
× 1 |
描述
带蓝牙的微型战斗机 BOT
?
嘿大家怎么了!
?
?
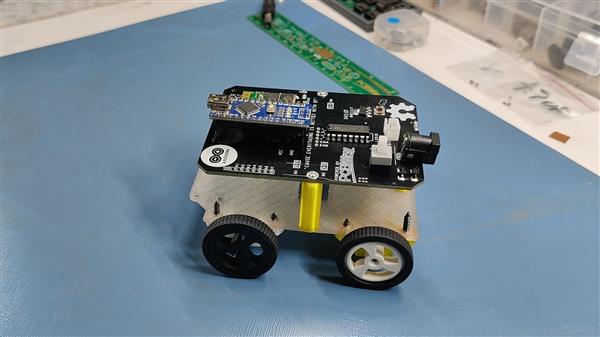
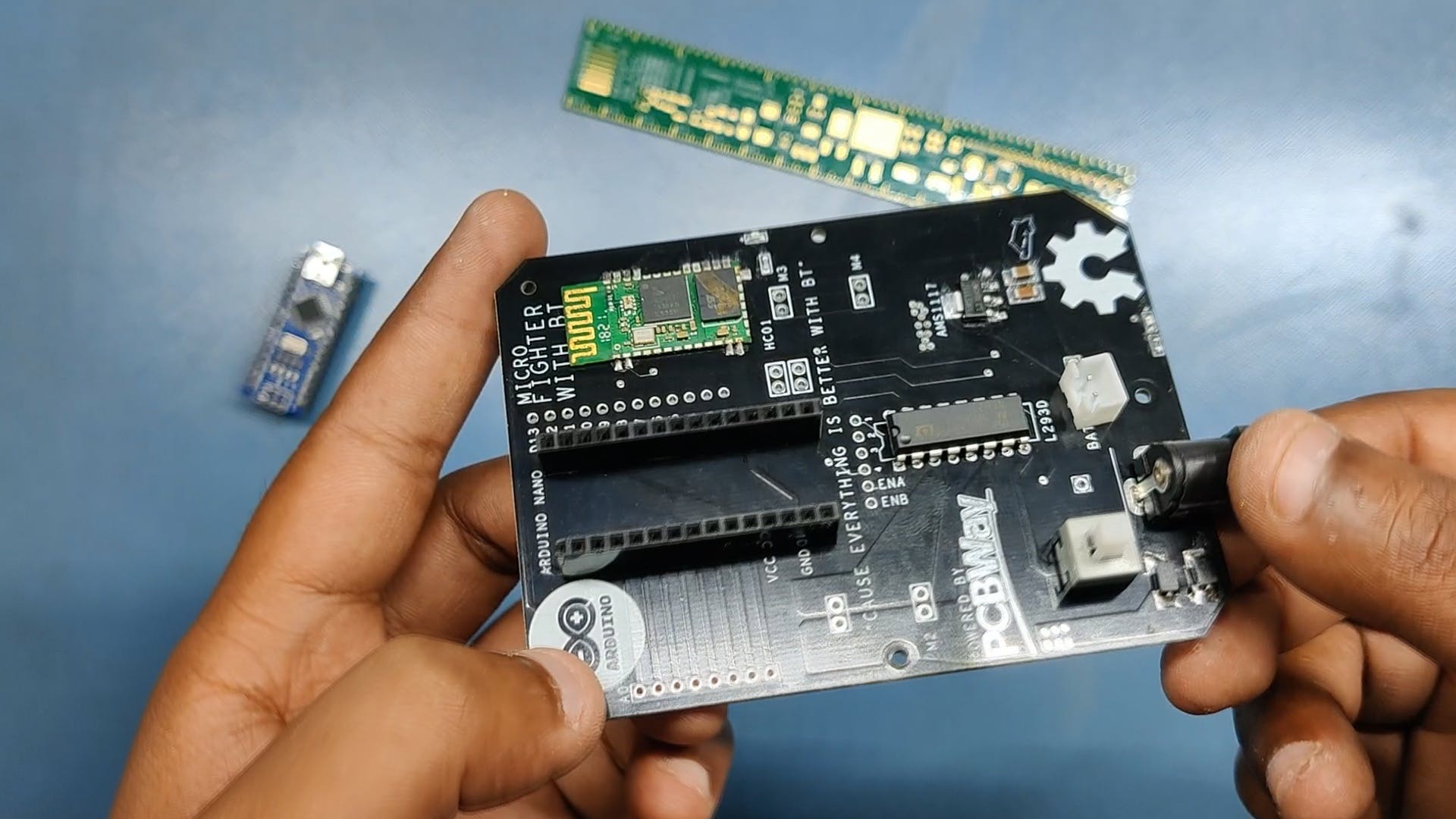
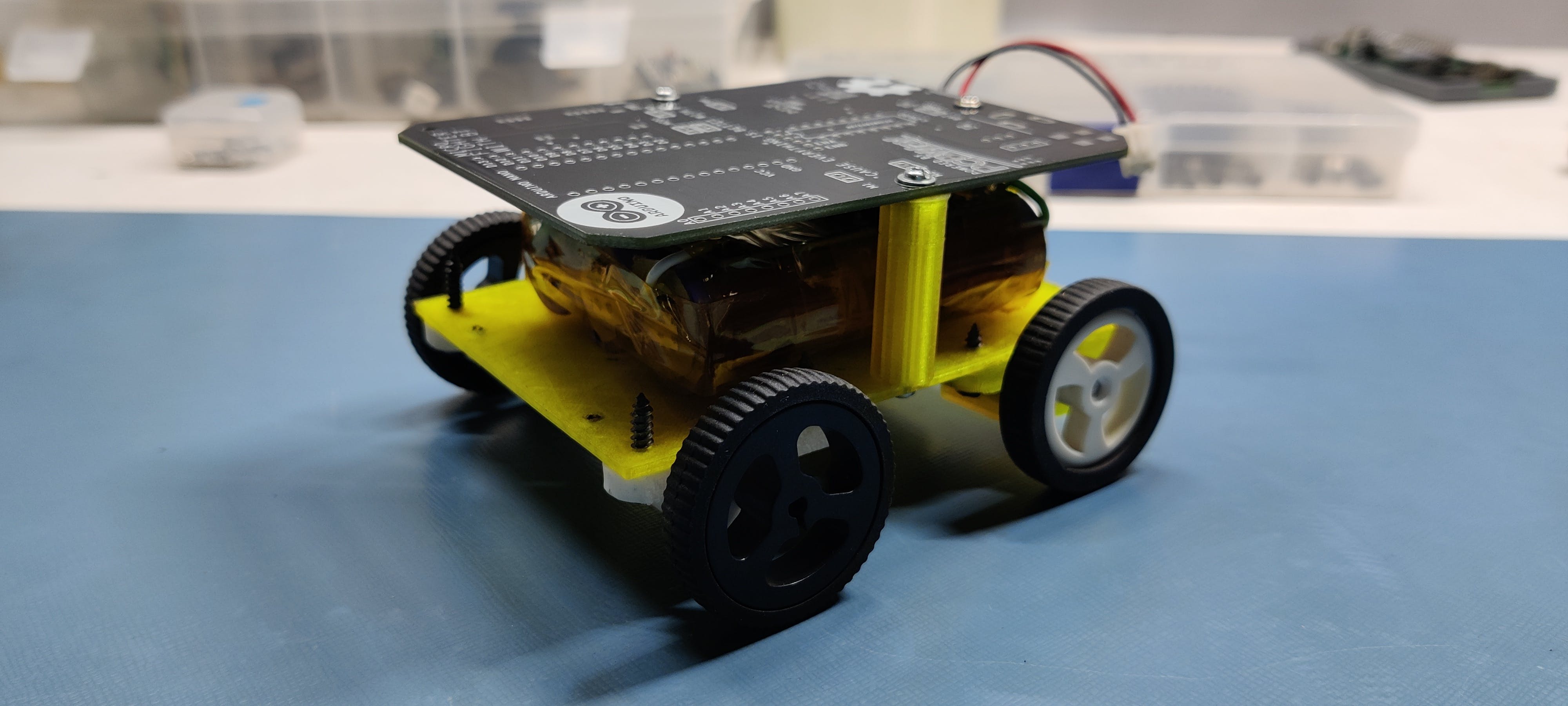
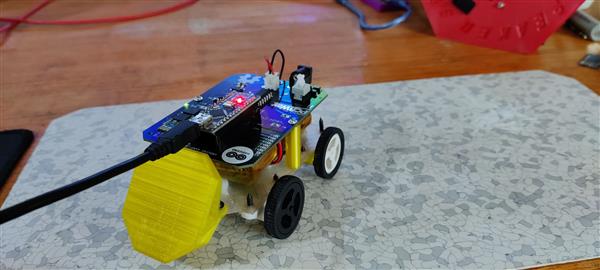
这是我的 Micro Fighter Bot 或 Micro Robot V2,它是一个易于制作的微型机器人,由 Arduino Nano 板和 L293D 电机驱动器 IC 供电。
?
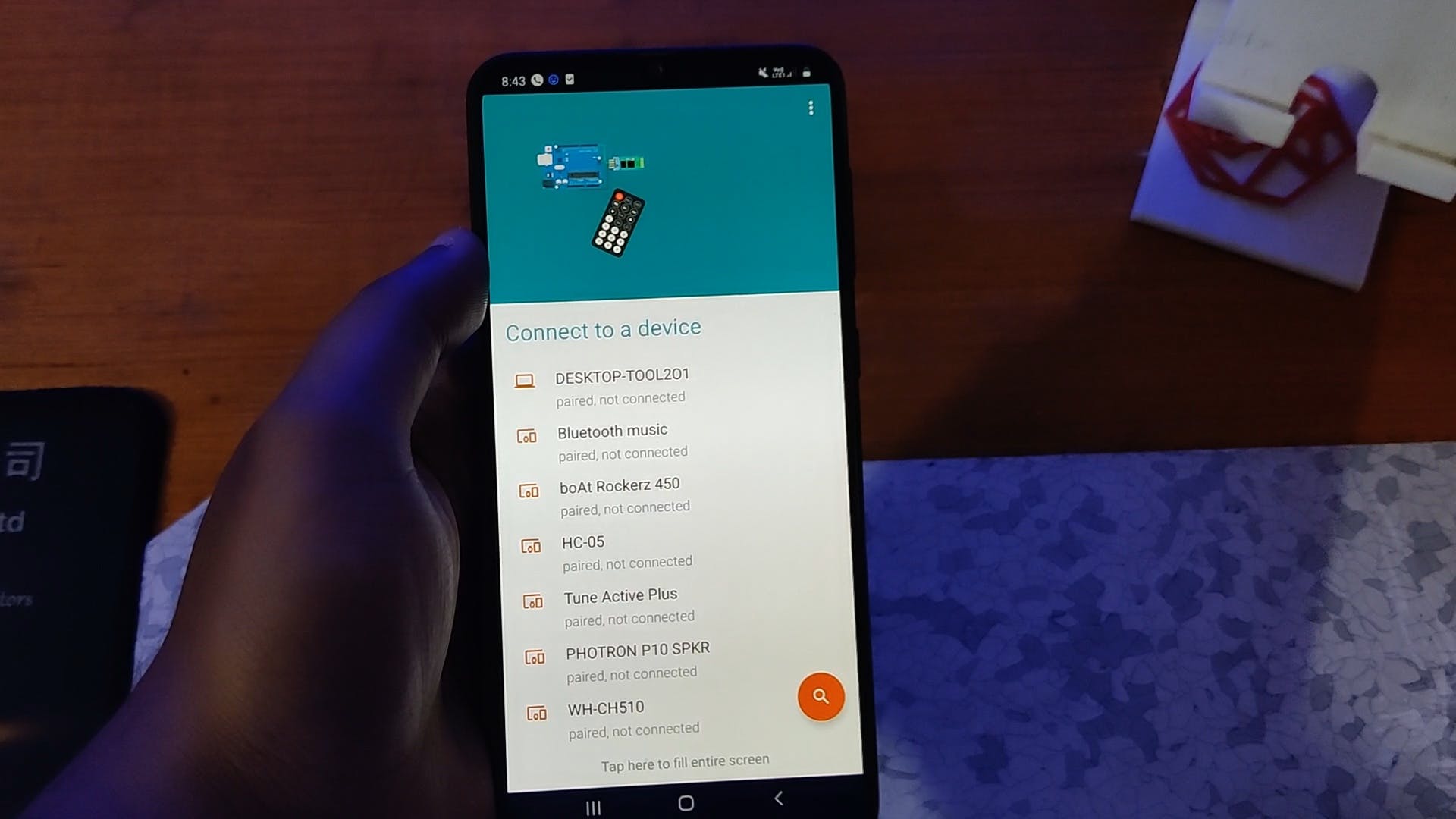
我正在使用 google play store 上提供的基于蓝牙的移动终端应用程序来控制这个机器人。?
?
是的,我在这里使用蓝牙,好的旧 HC01 模块。
?
机器人背后的想法
?
制作机器人的目标是制作一个小型机器人平台,我可以在我的下一个项目中使用它,这是一个格斗机器人组合。基本上,我想准备一个小而快的机器人,可以和其他小机器人战斗,不是死战,而是普通的相扑比赛。
?
?
之前,我做了一个类似的只有两个轮子的微型机器人,那个机器人的问题是稳定性。
此外,它也不能很好地通过障碍物,例如岩石地形、急剧下降或低摩擦区域。
?
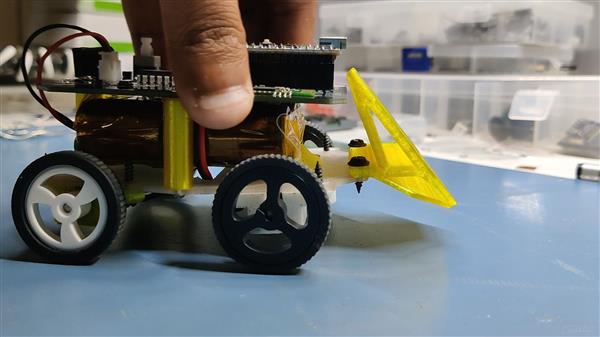
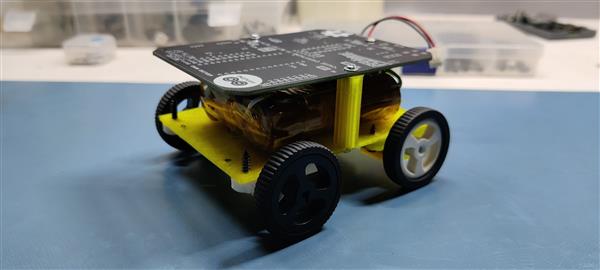
为了改善这一点,我准备了这个有 4 个轮子的机器人,所以它有一个坚固的框架,重心位于机器人的最中心部分,因为这有助于高速急转弯。
?
我在 Fusion360 中设计了这个机器人 首先,这里的想法是制作一个底座,用于从底座的底部拧紧电机支架,并且有 3 个支柱,可以在其上安装 PCB。在 PCB 和底座之间,放置了一块锂离子电池。
所以这就是计划。
?
所需材料
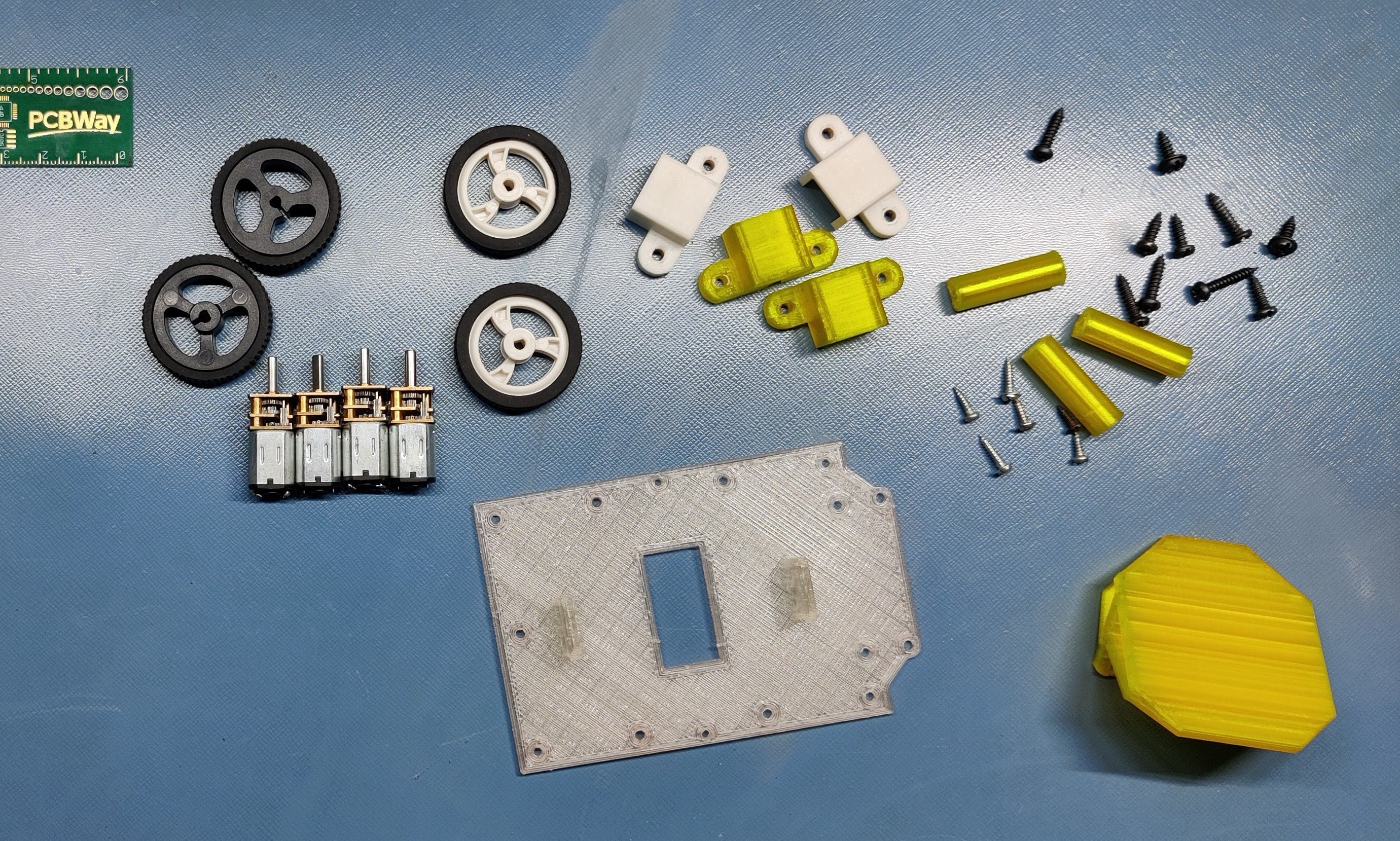
3D打印零件-
- 底座 x 1
- 马达座 x 4
- 前盾 x 1
- 柱子 x 3
?
成分
?
- L293D电机驱动IC
- 阿杜诺纳米
- 定制PCB(由PCBWAY提供)
- 微型齿轮直流电机
- 母头针
- DC 筒式千斤顶
- AMS1117
- 4.7uf Cap 1206 封装
- 22uf Cap 1206 封装
- 贴片 LED 0603 封装
- 1K电阻0603封装
- HC01模块
- 电池 JST 连接器
?
?
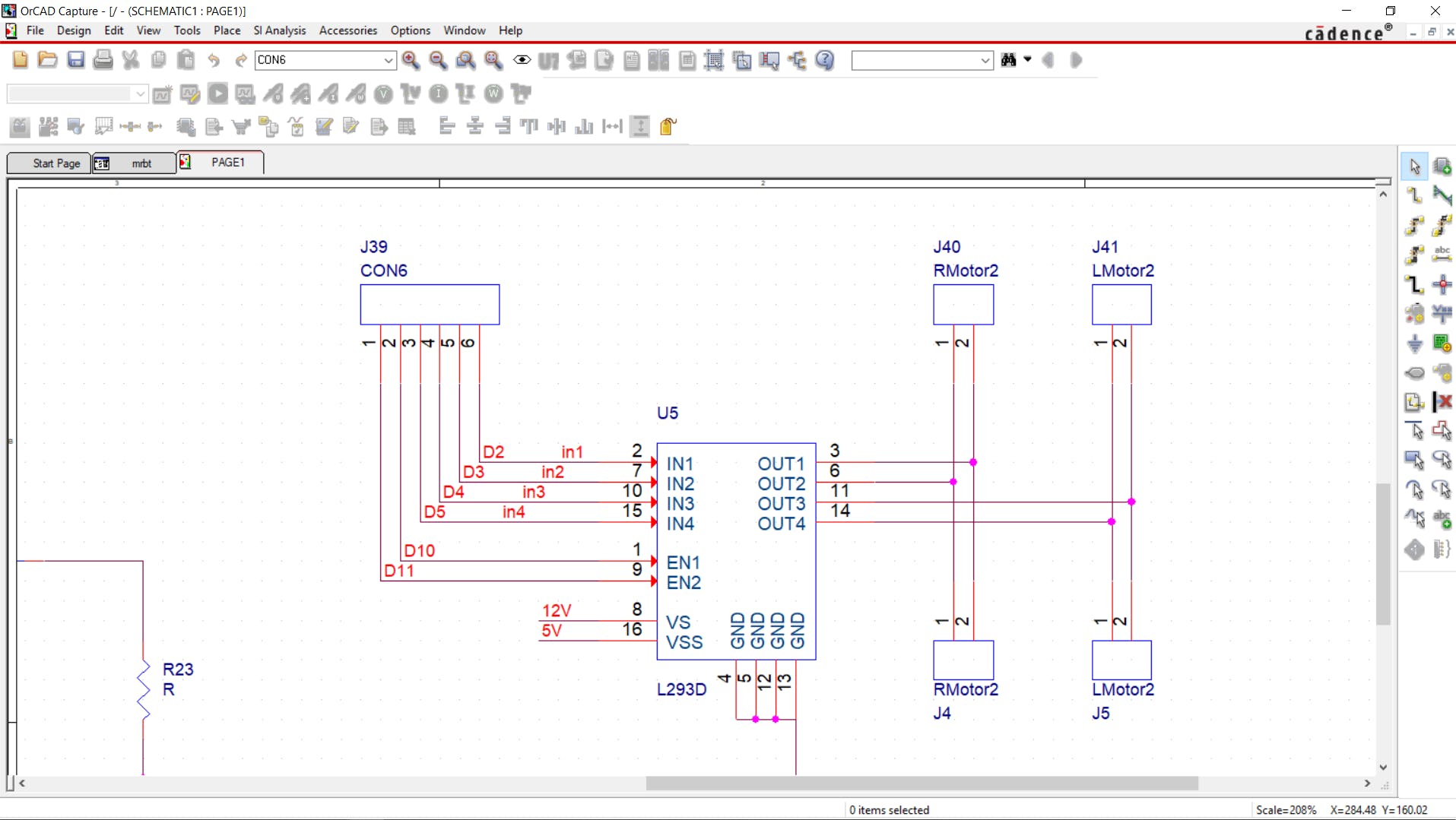
制作 PCB 项目的第一步是制作原理图,其中包含我们运行项目所需的所有组件。
?
?
我准备了一个简单的设置,其中包括一个 Arduino Nano 与 L293D 电机驱动器 IC 连接在正确的配置中,HC01 也与 Arduino Nano 连接。
我在此设置中使用了 12V 2.6A 电池,不建议直接使用 Arduino 的 VIN 端口添加 12V,因此我添加了 AMS1117 以将此 12V 降压为 3.3V,以便 Arduino 和 HC01 运行而不会出现任何问题。
?
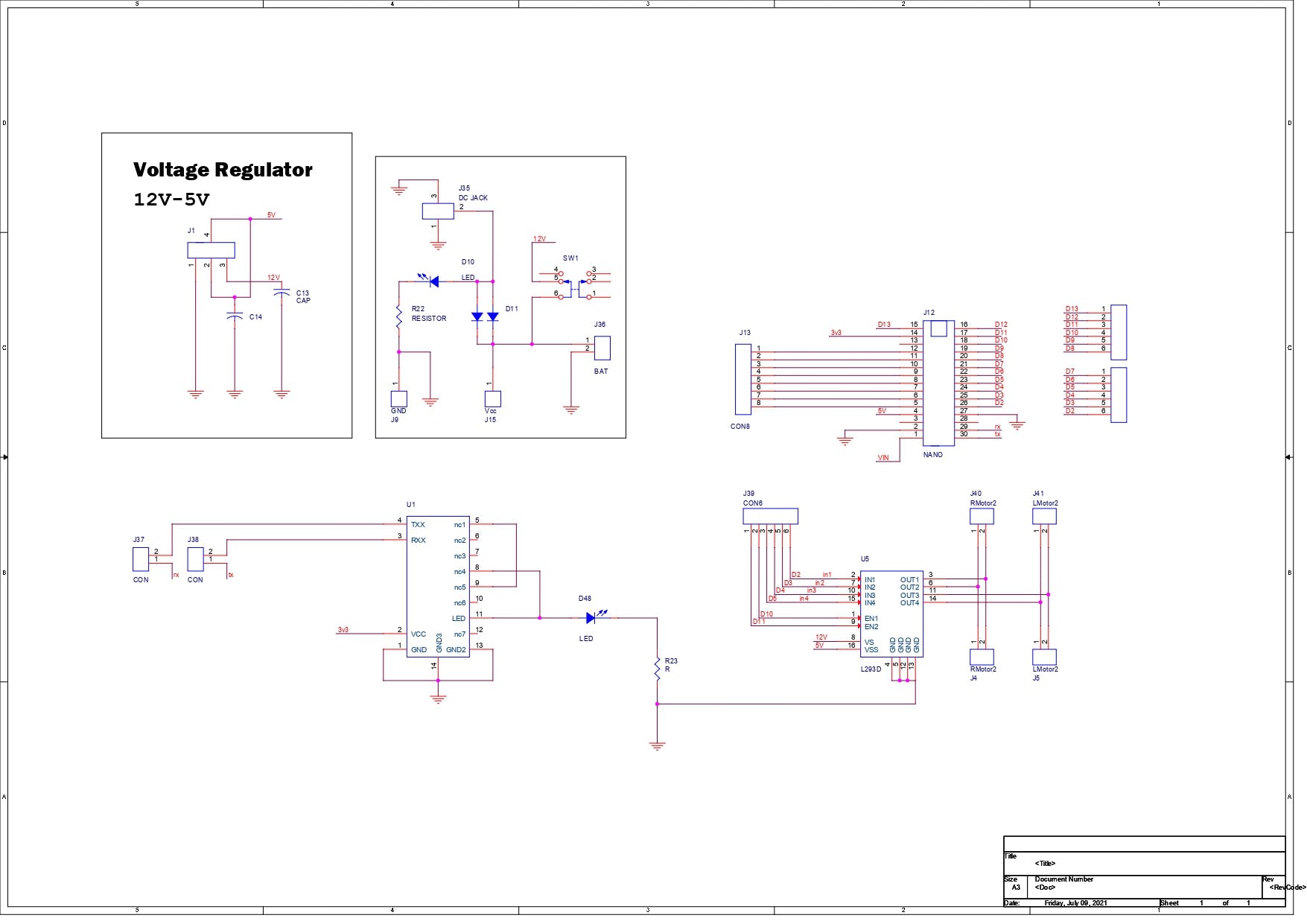
这是我准备的示意图!
?
完成此原理图后,我导入其网表并将其转换为 PCB 设计。
至于PCB Outline,我使用了fusion360 Model的参考尺寸,然后根据它制作PCB。
我导出了 Gerber 数据,然后将其发送到 PCBWay 以获取样本。
?
PCBWAY评论
?
?
将 PCB 送去制造后,只用了 7 天就可以送达。
我收到的 PCB 和预期的一样好!
PCBWay你们摇滚!
查看 PCBWay 以更低的成本获得出色的 PCB 服务!
?
笔记-
?
?
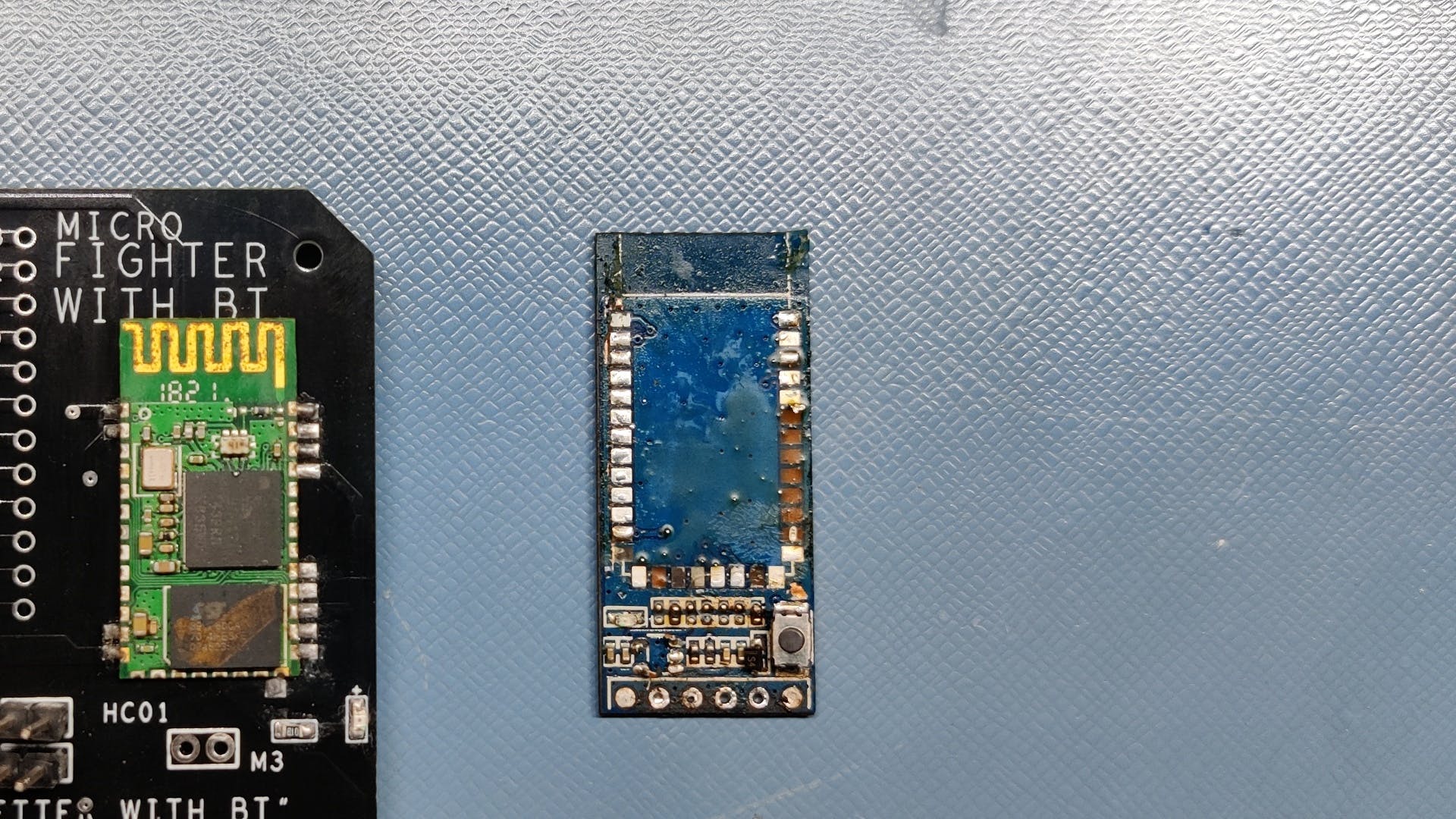
在开始组装过程之前,这里有一个简单的事实。我正在使用一个很难找到的 HC01 模块,你可以很容易地在互联网上找到它的分线板,但这些模块并不容易获得。
此外,它们的成本很高,所以我所做的是,我拿了一个 HC05 模块并将其放在我的回流焊炉上,然后从分线板上取下 HC01 模块。
?
PCB组装
?
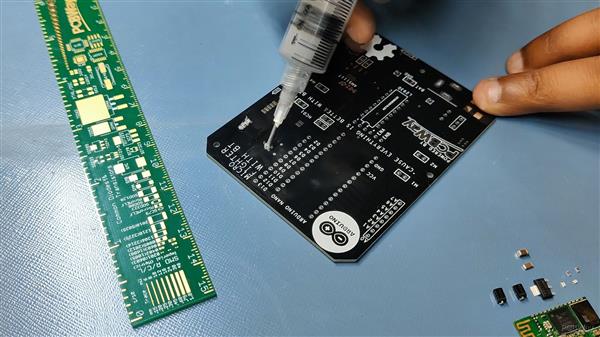
收到 PCB 后,剩下要做的就是在每个元件焊盘上涂抹焊膏。
?
1. 锡膏分配
?
?
我使用了普通的 Sn-Pb 焊膏,其熔化温度为 140 至 270 °C
锡膏点胶方法比较简单,我们在每个元件焊盘上一点一点地涂抹少量锡膏,这需要时间。
添加锡膏后,我们需要做“PICK and Place Process”
?
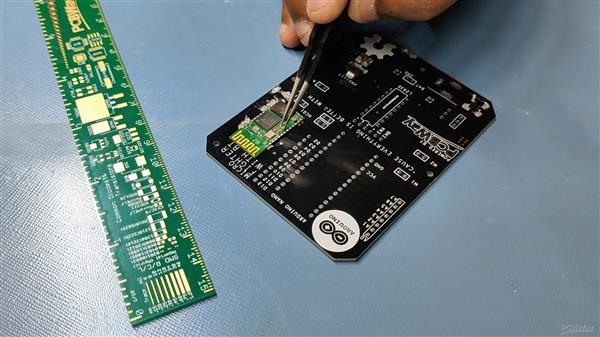
2. 拾取和放置过程
?
?
然后,我使用 ESD 镊子仔细挑选每个组件并将其一个一个放置在指定的位置,这需要大约 3 分钟的时间,但最终结果是一个完美的 PCB,所有组件都以正确的方向放置在它们的位置。
?
3. 热板回流
?

?
在“PICK and Place Process”之后,我小心翼翼地将整个电路板抬起并放在我的 DIY SMT Hotplate 上,它也是自制的,就像这个项目一样。
几分钟后,当热板达到焊膏熔化温度时,所有组件都将通过此热回流工艺焊接。
?
4. THT 组件
?
?
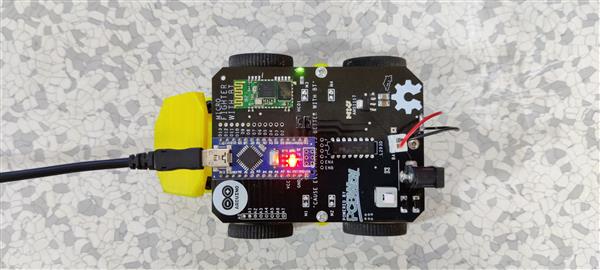
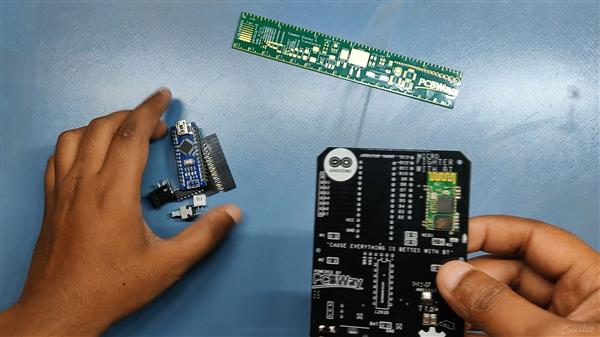
现在我们必须添加 THT 组件,即 Header 引脚、DC Jack、L293D IC 和电池 JST 连接器。
我只是用普通的烙铁来完成这项工作。
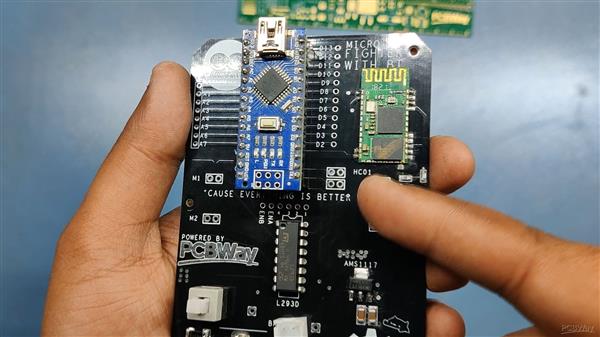
最后,我们将 Arduino Nano 放在头针上。
?
?
?
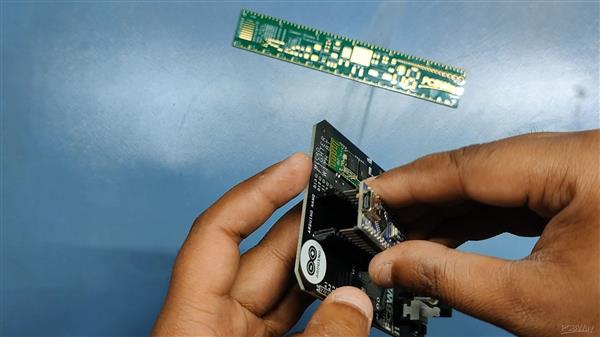
正如您在此处看到的,我在 PCB 上添加了跳线引脚,它们与 TX 和 RX 串联。
你看,如果我们直接在 PCB 上添加带有 HC01 的 Arduino 的 RX 和 TX,而没有任何分线点,我们将因为 UART 错误而无法对 Arduino nano 进行编程。
?
我已经在 PCB 上添加了这两个插头引脚,因此我可以将它们短路,通过这个 HC01 将与 Arduino Nano 通信,当我们必须对 Arduino Nano 进行编程时,我们只需从这些插头引脚上移除两个跳线。
您也可以移除 Arduino Nano 并使用草图对其进行编程,然后将其放回 PCB 上,这种方法可行,但对我来说工作量太大,所以我更喜欢使用接头引脚。
无论如何,在这样做之后,我们的 PCB 终于准备好了。但我们仍然需要检查电路是否正常工作。
?
测试电路!
?
?
?

?

?
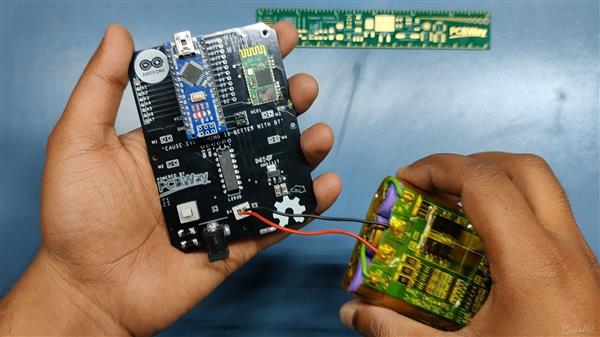
为了测试这块板,我基本上会使用两件事,首先,我将使用这个电池,它是一个 12V 的锂离子电池组,我有一个 BMS,所以我们不必担心它的很多相关的事情电池保护。
- 我们首先将电池添加到我们的 PCB 上,并以正确的极性连接 JST。
- 然后我们打开开关,我们的 Arduino nano 和 HC01 正在工作。
- HC05 LED 闪烁并且 LED 在 Arduino nano 中发光,这意味着这两个模块都可以正常工作。
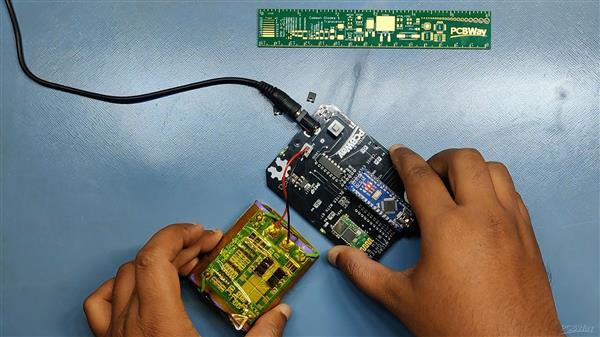
- 接下来,我在 DC Barrel 插孔上添加了一个 12V 5A SMPS,用于为车载电池组充电。DC 插孔一侧的 LED 发光,这意味着一切都很好而且花花公子。
- 现在,我终于拿出手机和HC01模块配对了。
- 然后我在手机中打开了一个蓝牙终端应用程序并连接了HC01。连接后,LED 停止其频繁的闪烁序列,这表明模块现在已与设备连接。
所以我们的 PCB 现在已经通过了它的测试过程,现在我们将准备 3D 打印的基体,它将容纳 PCB 和其他东西。
?
3D 打印零件和车身装配
?
?
这是这个下部底座,它从底部固定着四个带有电机安装支架的直流电机。
然后三个支柱在对面,这些支柱将用于将 PCB 和 Base 安装在一起。
在 PCB 和 Base 之间,放置了一个锂离子电池,所以它是一个紧凑的设置,可以很好地将所有东西结合在一起。
?
?
至于这些 3D 打印部件的材料,我选择透明 PLA 和透明黄色 PLA,看起来有点像金色,但不是。
?
?
将所有内容加在一起后,我在中间部分添加了电池并将其端子与 JST 连接器连接。
然后我按此顺序将电线添加到电机和 PCB
?
?
代码
?
motorLpin1 = ;
motorLpin2 = ;
motorRpin1 = ;
motorRpin2 = ;
rightMotorENA = ;
leftMotorENB = ;
电机速度 = ;
转= ;
{
序列号.开始();
Serial.flush();
pinMode(motorLpin1,输出);
pinMode(motorLpin2,输出);
pinMode(电机Rpin1,输出);
pinMode(电机Rpin2,输出);
pinMode(右MotorENA,输出);
pinMode(左MotorENB,输出);
}
{
字符串输入= ;
(Serial.available()){
输入+=()Serial.read();
延迟();
}
(输入== ){
马达停止();
}
(输入== ){
电机前锋();
}
(输入== ){
电机后退();
}
(input.indexOf( )> ){
左电机();
}
(input.indexOf( )> ){
马达右();
}
(input.indexOf( )> ){
正方形();
}
}
{
数字写入(motorLpin1,HIGH);
数字写入(motorLpin2,LOW);
数字写入(motorRpin1,HIGH);
数字写入(电机Rpin2,低);
模拟写入(左MotorENB,);
模拟写入(右MotorENA,);
}
{
数字写入(motorLpin1,LOW);
数字写入(motorLpin2,HIGH);
数字写入(motorRpin1,LOW);
数字写入(motorRpin2,HIGH);
模拟写入(左MotorENB,);
模拟写入(右MotorENA,);
}
{
数字写入(motorLpin1,HIGH);
数字写入(motorLpin2,LOW);
数字写入(motorRpin1,LOW);
数字写入(motorRpin2,HIGH);
类比写入(左MotorENB,);
类比写入(右MotorENA,);
}
{
数字写入(motorLpin1,LOW);
数字写入(motorLpin2,HIGH);
数字写入(motorRpin1,HIGH);
数字写入(电机Rpin2,低);
类比写入(左MotorENB,);
类比写入(右MotorENA,);
}
{
数字写入(motorLpin1,LOW);
数字写入(motorLpin2,LOW);
数字写入(motorRpin1,LOW);
数字写入(电机Rpin2,低);
digitalWrite(leftMotorENB,LOW);
digitalWrite(右MotorENA,LOW);
}
{
}
?
上传过程非常简单,我们首先从 HC01 Header 引脚上移除跳线,然后将 Arduino nano 连接到我们的计算机并使用 Arduino IDE 刷新 Bot,这几乎就是上传过程!
代码非常简单,您可以根据需要或要求进行更改。
(刷机过程后别忘了加跳线回原位)
我们的 MicroBot 已准备好进行首次运行!
?
应用程序
?
?
现在,以前的版本是一个 blynk 应用程序的控制器,但我在这个项目中没有使用 ESP32 或 ESP8266。我们需要一个蓝牙终端应用程序。
我正在使用这个蓝牙控制器应用程序,您可以从 google play 商店下载。?https://play.google.com/store/apps/details?id=com.giumig.apps.bluetoothserialmonitor
?
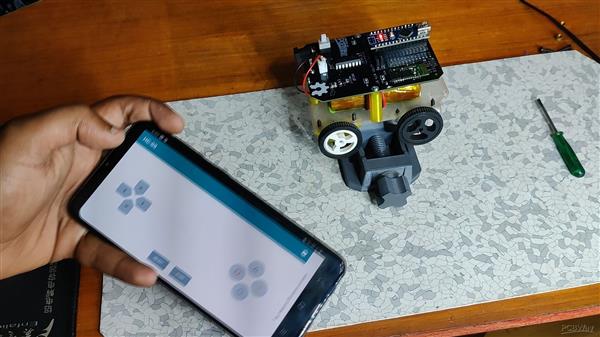
打开这个应用程序并将您的 HC01 与它配对,然后打开它的控制器模式并为按钮分配它们的值,在我们的例子中就是这些。
- TL 左转
- TR 右转
- F代表前进
- R 反向
- S 停止
现在我们只需按任意按钮来控制这个机器人!
?
?
?
结果/测试运行
?
?
结论与改进
?
?
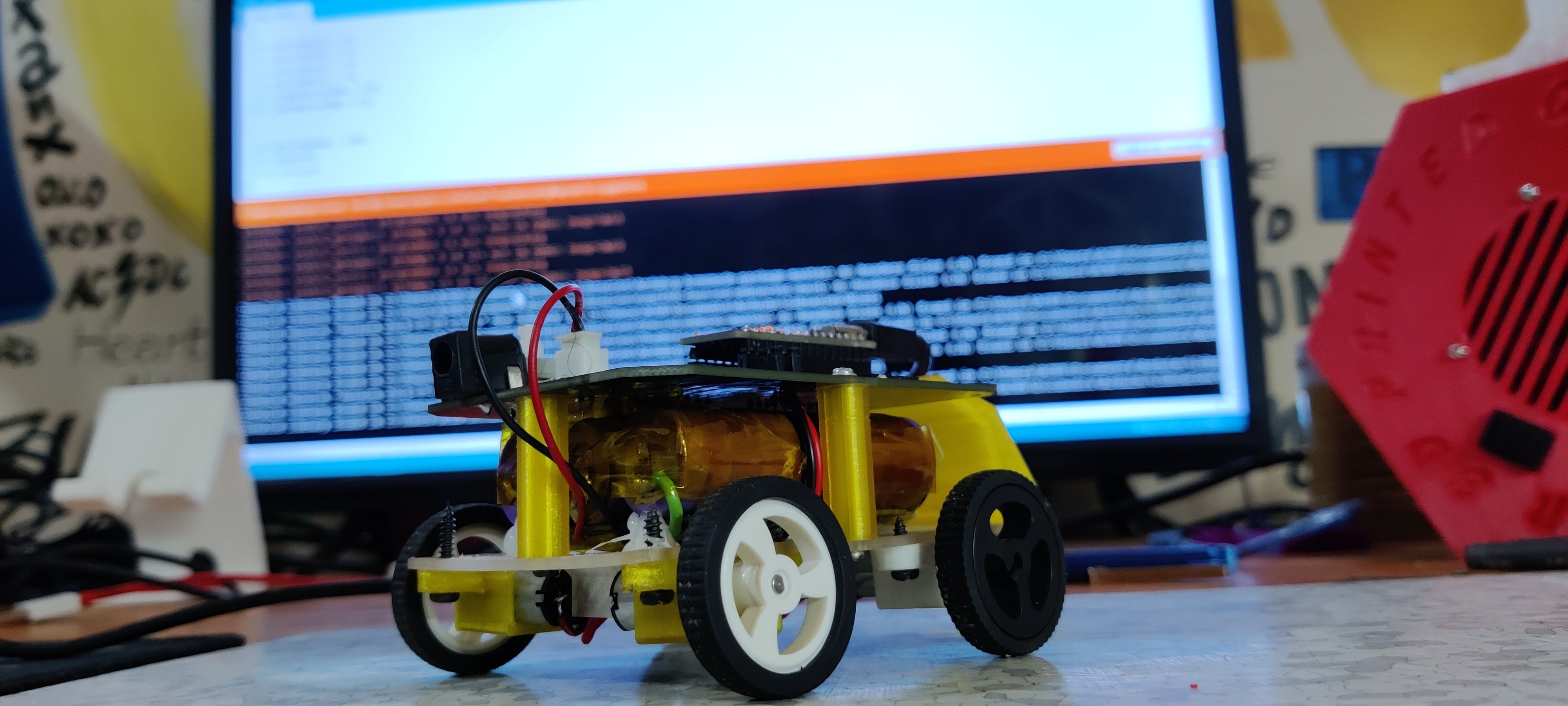
如您所见,我们的机器人正在工作!它非常快,这是我的目标,让它尽可能快和坚固。
?
?
现在,这个设置就像一个开发平台,一个微型战斗机平台。
这里的想法是制作多个这些根并让它们进行战斗和其他事情。此外,我们还必须在这些机器人中添加一些噱头,例如普通武器护盾盔甲等。
?
这个项目是完全开源的,所以如果这里有人想要制作其中一个机器人,那么所有的文件都附上了。
如果您需要更多帮助,请评论/DM。
?
如果 Project 很有趣,那就按赞按钮吧!
?
感谢 PCBWAY 为本项目提供 PCB,
查看 PCBWay 以更低的价格获得出色的 PCB 服务。
我会在下一个项目中见到你们!
?
代码
|
?
|
int motorLpin1 = 2; |
|
?
|
int motorLpin2 = 3; |
|
?
|
int motorRpin1 = 4; |
|
?
|
int motorRpin2 = 5; |
|
?
|
int rightMotorENA = 10; |
|
?
|
int leftMotorENB = 11; |
|
?
|
?
|
|
?
|
?
|
|
?
|
int motorSpeed = 200; |
|
?
|
int turn=50; |
|
?
|
void setup() |
|
?
|
{ |
|
?
|
Serial.begin(9600); |
|
?
|
Serial.flush(); |
|
?
|
pinMode(motorLpin1,OUTPUT); |
|
?
|
pinMode(motorLpin2,OUTPUT); |
|
?
|
pinMode(motorRpin1,OUTPUT); |
|
?
|
pinMode(motorRpin2,OUTPUT); |
|
?
|
pinMode(rightMotorENA,OUTPUT); |
|
?
|
pinMode(leftMotorENB,OUTPUT); |
|
?
|
?
|
|
?
|
?
|
|
?
|
} |
|
?
|
?
|
|
?
|
void loop(){ |
|
?
|
String input=""; |
|
?
|
while(Serial.available()){ |
|
?
|
input+=(char)Serial.read(); |
|
?
|
delay(5); |
|
?
|
} |
|
?
|
?
|
|
?
|
if(input=="S"){ |
|
?
|
MotorStop(); |
|
?
|
} |
|
?
|
else if(input=="F"){ |
|
?
|
MotorForward(); |
|
?
|
} |
|
?
|
else if(input=="R"){ |
|
?
|
MotorBackward(); |
|
?
|
} |
|
?
|
else if(input.indexOf("TR")>-1){ |
|
?
|
MotorLeft(); |
|
?
|
} |
|
?
|
else if(input.indexOf("TL")>-1){ |
|
?
|
MotorRight(); |
|
?
|
} |
|
?
|
?
|
|
?
|
else if(input.indexOf("SQ")>-1){ |
|
?
|
SQUARE(); |
|
?
|
} |
|
?
|
?
|
|
?
|
?
|
|
?
|
} |
|
?
|
?
|
|
?
|
void MotorForward(void) |
|
?
|
{ |
|
?
|
digitalWrite(motorLpin1,HIGH); |
|
?
|
digitalWrite(motorLpin2,LOW); |
|
?
|
digitalWrite(motorRpin1,HIGH); |
|
?
|
digitalWrite(motorRpin2,LOW); |
|
?
|
analogWrite(leftMotorENB,200); |
|
?
|
analogWrite(rightMotorENA,200); |
|
?
|
} |
|
?
|
?
|
|
?
|
void MotorBackward(void) |
|
?
|
{ |
|
?
|
?
|
|
?
|
digitalWrite(motorLpin1,LOW); |
|
?
|
digitalWrite(motorLpin2,HIGH); |
|
?
|
digitalWrite(motorRpin1,LOW); |
|
?
|
digitalWrite(motorRpin2,HIGH); |
|
?
|
analogWrite(leftMotorENB,200); |
|
?
|
analogWrite(rightMotorENA,200); |
|
?
|
} |
|
?
|
void MotorLeft(void) |
|
?
|
{ |
|
?
|
digitalWrite(motorLpin1,HIGH); |
|
?
|
digitalWrite(motorLpin2,LOW); |
|
?
|
digitalWrite(motorRpin1,LOW); |
|
?
|
digitalWrite(motorRpin2,HIGH); |
|
?
|
analogWrite(leftMotorENB,50); |
|
?
|
analogWrite(rightMotorENA,50); |
|
?
|
} |
|
?
|
void MotorRight(void) |
|
?
|
{ |
|
?
|
?
|
|
?
|
digitalWrite(motorLpin1,LOW); |
|
?
|
digitalWrite(motorLpin2,HIGH); |
|
?
|
digitalWrite(motorRpin1,HIGH); |
|
?
|
digitalWrite(motorRpin2,LOW); |
|
?
|
analogWrite(leftMotorENB,50); |
|
?
|
analogWrite(rightMotorENA,50); |
|
?
|
} |
|
?
|
void MotorStop(void) |
|
?
|
{ |
|
?
|
?
|
|
?
|
digitalWrite(motorLpin1,LOW); |
|
?
|
digitalWrite(motorLpin2,LOW); |
|
?
|
digitalWrite(motorRpin1,LOW); |
|
?
|
digitalWrite(motorRpin2,LOW); |
|
?
|
digitalWrite(leftMotorENB,LOW); |
|
?
|
digitalWrite(rightMotorENA,LOW); |
|
?
|
} |
|
?
|
?
|
|
?
|
void SQUARE(void) |
|
?
|
{ |
|
?
|
?
|
|
?
|
?
|
|
?
|
} |
- 带Arduino和蓝牙的智能咖啡机
- 轻型战斗机开源设计
- 高通CSR 蓝牙PIF天线和蛇形PCB天线设计指导
- 杰力科创三键带DAC输出蓝牙音箱DLT8M04S 5次下载
- abg欧博PCB-不规则拼板设计 0次下载
- 基于单片机的PCB设计源代码下载 45次下载
- PCB设计:蓝牙小键盘资料下载
- PCB设计:带重力传感器的蓝牙音箱资料下载
- 4层蓝牙产品PCB设计素材 0次下载
- 如何使用HC-05蓝牙模块进行单片机通讯
- 多型号战斗机角速率陀螺组件综合检测系统设计 0次下载
- 微型四轴PCB结构图 0次下载
- 蓝牙对讲手机APP蓝牙对讲对讲机PTT对讲方案 61次下载
- BOT项目公司的十大特质
- 空战指挥系统战斗机引导动态决策模型
- 宽禁带器件和仿真环境介绍 1582次阅读
- 智能传感器与蓝牙连接之间的问题怎样来解决 3615次阅读
- dfrobot带接口金属齿轮减速电机 (50:1)简介 1231次阅读
- dfrobot带接口金属齿轮减速电机 (30:1)简介 1154次阅读
- dfrobot带接口金属齿轮减速电机 (75:1)简介 1311次阅读
- dfrobot双路15A大功率电机驱动介绍 1804次阅读
- 什么是单片机_单片机的概念 3.6w次阅读
- AR-HUD中阳光负载建模的重要性 2840次阅读
- 美军用3D打印制造战斗机起落架舱门上的小部件 4080次阅读
- 探讨下一代战斗机雷达隐身技术的研究和发展 4620次阅读
- 战斗机器人或将走进现实世界 3182次阅读
- 一文教你如何用单片机系统制作微型打印机 5504次阅读
- “导游Bot”在模拟的纽约市中导航定位,使用自然语言跟“游客Bot”交流 2348次阅读
- led灯带基础知识及安装 3.2w次阅读
- 微型投影机技术类型分析与对比 1411次阅读

 上传资料赚积分
上传资料赚积分下载排行
本周
- 1山景DSP芯片AP8248A2数据手册
- 1.06 MB | 532次下载 | 免费
- 2RK3399完整板原理图(支持平板,盒子VR)
- 3.28 MB | 339次下载 | 免费
- 3TC358743XBG评估板参考手册
- 1.36 MB | 330次下载 | 免费
- 4DFM软件使用教程
- 0.84 MB | 295次下载 | 免费
- 5元宇宙深度解析—未来的未来-风口还是泡沫
- 6.40 MB | 227次下载 | 免费
- 6迪文DGUS开发指南
- 31.67 MB | 194次下载 | 免费
- 7元宇宙底层硬件系列报告
- 13.42 MB | 182次下载 | 免费
- 8FP5207XR-G1中文应用手册
- 1.09 MB | 178次下载 | 免费
本月
- 1OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 2555集成电路应用800例(新编版)
- 0.00 MB | 33566次下载 | 免费
- 3接口电路图大全
- 未知 | 30323次下载 | 免费
- 4开关电源设计实例指南
- 未知 | 21549次下载 | 免费
- 5电气工程师手册免费下载(新编第二版pdf电子书)
- 0.00 MB | 15349次下载 | 免费
- 6数字电路基础pdf(下载)
- 未知 | 13750次下载 | 免费
- 7电子制作实例集锦 下载
- 未知 | 8113次下载 | 免费
- 8《LED驱动电路设计》 温德尔著
- 0.00 MB | 6656次下载 | 免费
总榜
- 1matlab软件下载入口
- 未知 | 935054次下载 | 免费
- 2protel99se软件下载(可英文版转中文版)
- 78.1 MB | 537798次下载 | 免费
- 3MATLAB 7.1 下载 (含软件介绍)
- 未知 | 420027次下载 | 免费
- 4OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 5Altium DXP2002下载入口
- 未知 | 233046次下载 | 免费
- 6电路仿真软件multisim 10.0免费下载
- 340992 | 191187次下载 | 免费
- 7十天学会AVR单片机与C语言视频教程 下载
- 158M | 183279次下载 | 免费
- 8proe5.0野火版下载(中文版免费下载)
- 未知 | 138040次下载 | 免费





 工商网监
工商网监
评论