 电子发烧友App
电子发烧友App


描述
这是一款使用LSRB算法解决迷宫的线迷宫机器人。与许多机器人不同,这是通过使用 IR 传感器阵列来完成的,但我找到了一种仅使用 3 个 IR 传感器来解决迷宫问题的方法。与此同时还节省了很多经费,因此这个项目也可以说是爱好者的一个简单且更便宜的选择。
前提
在开始实际项目之前,还有一些先决条件。
熟悉通用PCB的焊接
基础物理(质心、摩擦力、重心和车轮)
硬件
对称底盘
陀螺仪(可选)
60 RPM 直流电机
车轮
红外传感器
Arduino Pro Mini
1. 对称底盘

拥有对称底盘非常重要。
如果底盘不对称,则机器人车的质心(COM)将不在中心。如果发生这种情况,机器人将继续向右或向左移动,这将导致最短路径算法出现问题或缺陷。
2. 马达驱动器(L298N)
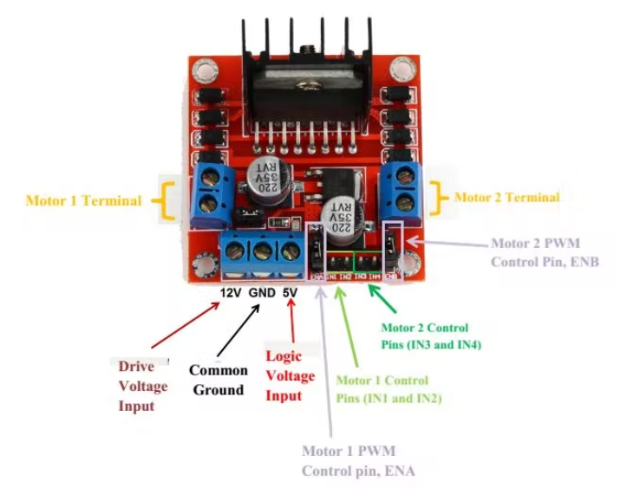
这将用于驱动直流电机。L298N是双通道的,意思是它可以同时控制两个电机的方向。
3.Mpu 6050
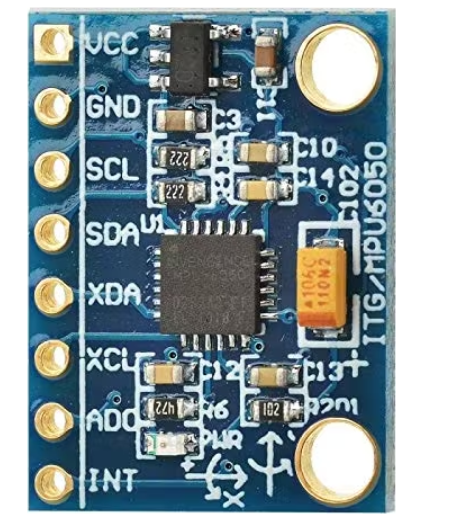
MPU6050是6轴加速度加陀螺仪模块。这意味着它可以测量 X、Y 和 Z 方向的加速度,还可以测量运动中身体的偏航、俯仰和滚动。
4. 60 RPM 直流电机

这些电机将用于移动机器人。为什么选择 60 RPM 电机?好吧,如果您正在入门,最好从慢速马达开始。速度慢的机器人更稳定,更容易控制。对于许多强劲的 RPM,电机将难以控制(为此您需要强大的 PID 控制器)。因此,要开始使用,建议使用 60 RPM 直流电机。
5. 轮子

这些是迷宫解决机器人中最重要的组件之一。确保您的车轮具有更好的牵引力并且由优质橡胶制成。这些车轮将连接到直流电机。
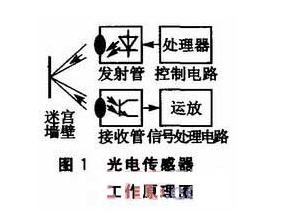
6. 红外传感器

这些传感器将在检测交叉路口类型方面发挥重要作用。
7.Arduino Pro mini
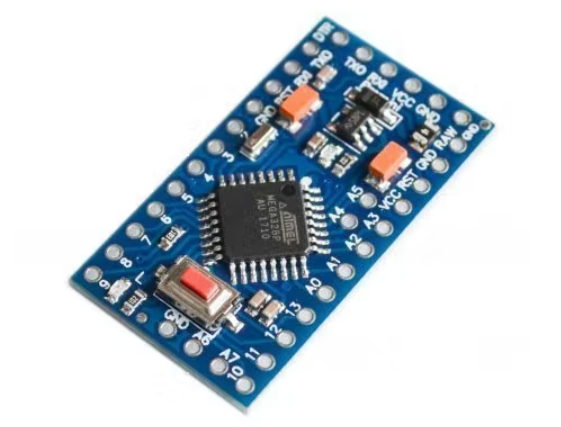
这将是我们机器人的大脑。算法的所有处理和计算都将在这个微控制器中进行。
“LSRB”算法
这是机器人解决迷宫的算法。在“LSRB”中,L 代表“LEFT”,S 代表“STRAIGHT”,R 代表 RIGHT,B 代表“BACK”或 BACKWARD。这些 LEFT、RIGHT、STRAIGHT 和 BACK 是机器人遵循的方向。该算法简单直接。在该算法中,向左方向具有最高优先级,而后(U 形转弯)方向具有最低优先级。让我们看看这个算法是什么样子的:
第 1 步:只要有可能转弯,请始终跟随左转
第 2 步:如果无法向左走,请直接走。
第 3 步:如果 LEFT 和 STRAIGHT 都不可能,请选择 RIGHT。
第 4 步:如果 LEFT、STRAIGHT 和 RIGHT 都不可能返回(或者这意味着要掉头)
这意味着无论何时机器人在转折点或十字路口,它总是尽可能向左走。如果 LEFT 不可能,那么 STRAIGHT,如果两者都不可能,那么 RIGHT。如果所有三个转弯都不可能,那么只能返回。这是您唯一需要了解的 LSRB 算法。基于此,有 8 种可能的情况:
1.Simple 或 Straight lane :这里 LEFT 是不可能的,但 STRAIGHT 路径是。所以机器人将遵循直线路径。
2.左转(仅限左):顾名思义,这是左转,所以这里可以左转。根据 LSRB 算法,机器人应尽可能向左走。所以机器人会在这里左转。
3.右转(仅右转):同样顾名思义,这是一个右转,所以左和直路径都是不可能的,所以根据 LSRB 算法机器人将右转。
4. T相交(T):这个相交的形状像T,所以叫T相交。如图所示,Robot 可以左转。所以通过算法机器人会左转。
5. 左 T 路口(直或左):再次通过图像,我们可以看到机器人可以走左路,所以机器人会在这里左转。
6.Right T 交点(直或右):这里不可能向左,但直路径是。所以机器人会左转
7.Dead End:这里 LEFT、STRAIGHT 和 RIGHT 这三个都不可能。所以机器人会在这里掉头。
8. 四车道交叉口(Cross):此处再次通过图像左转是可能的,因此机器人将在此处左转。
最后,迷宫结束:迷宫在这里结束,所以机器人会停在这里。
现在让我们看一下如何将其转换为代码:
//LSRB ALGORITHM
IR1 =
IR2 =
IR3 =
void setup?
{
? DECLARE IR1 IR2 AND IR3 AS INPUTS
}
void loop?
{
? IR1 = digitalRead(
? IR2 = digitalRead(
? IR3 = digitalRead(
? if (IR1 == LOW && IR2 == HIGH && IR3 == LOW)//Straight path
? ? {
? ? ?Forward();
? ? }
? if (IR1 == HIGH && IR2 == LOW && IR3 == LOW)//Left turn
? ? {
? ? ?Left();
? ? }
? if (IR1 == LOW && IR2 == LOW && IR3 == HIGH)//Right Turn
? ? {
? ? ? Right();
? ? }
? if (IR1 == HIGH && IR2 == LOW && IR3 == HIGH)//T Intersection
? ? {
? ? ? Left(); // As left is possible
? ? }
? if (IR1 == HIGH && IR2 == HIGH && IR3 == LOW)//Left T Intersection
? ? {
? ? ? Left();// As Left is possible
? ? }
? if (IR1 == LOW && IR2 == HIGH && IR3 == HIGH)//Right T Tntersection
? ? {
? ? ?Forward();//As Straight path is possible
? ? }
? if (IR1 == LOW && IR2 ==LOW && IR3 == LOW)//Dead End
? ? {
? ? ?U_Turn(); //As no other direction is possible
? ? }
? if (IR1 == HIGH && IR2 == HIGH && IR3 == HIGH)//4 Lane intersection
? ? {
? ? ?Left(); //As no other direction is possible
? ? }
? if (IR1 == HIGH && IR2 == HIGH && IR3 == HIGH)//End of Maze
? ? {
? ? ?Stop(); //As no other direction is possible
? ? }?
}
代码很简单,但还有一个问题。4车道交叉口和迷宫尽头的情况似乎相似。我们的机器人如何区分 4 车道交叉口和 End of Maze?答案也很简单。让机器人走得更远一点。现在,如果传感器的值保持不变,那就结束了。但是如果左右传感器的值发生变化,那么它是一个 4 路交叉点。让我们看一下它的代码:
if (IR1 == HIGH && IR2 == HIGH && IR3 == HIGH)
? ? {
? ? ?Forward();
? ? ?delay(
? ? ?if (IR1 == HIGH && IR2 == HIGH && IR3 == HIGH)
? ? ? ? {
? ? ? ? ? Serial.println("?ND OF MAZE");
? ? ? ? ? Stop();
? ? ? ? }
? ? ?else
? ? ? ? {
? ? ? ? ?Serial.println("FOUR WAY INTERSECTION");
? ? ? ? ?Left();
? ? ? ? }
? ? }
最短路径算法
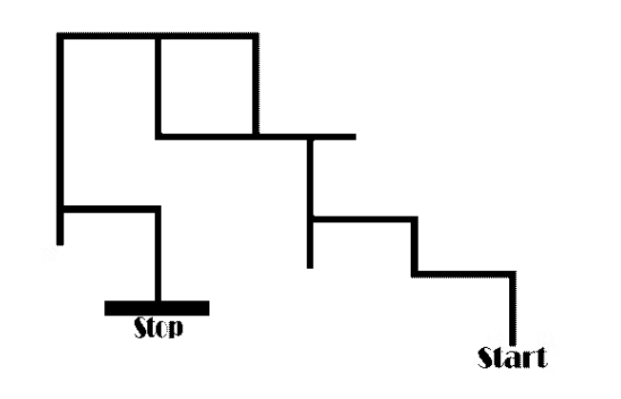
这是机器人用来计算迷宫中最短路径的算法。它使用使用 LSRB 算法获取的路径并将其转换为最短路径。如何?让我们看看这是如何工作的。考虑下图中的迷宫。现在让我们在这里放置一个机器人,让我们通过 LSRB 算法可视化它的路径。我们可以通过使用 LSRB 算法,机器人将采取 LEFT、LEFT、BACK、RIGHT、STRAIGHT。简而言之,我们可以说机器人跟随 L、L、B、R、S。现在作为一个人,我们可以直接说最短路径就是这里的 RIGHT 或“R”转。但是机器人是如何做到这一点的呢?最短路径算法在这里使用了替换。这些替换如下所示:
LBR = “B”
LBS = “R”
RBL = “B”
SBL = “R”
SBS = “B”
LBL = “S”
现在让我们通过替换方法缩短路径。在路径 {L, L, B, R, S} 中,LBR = 'B' 所以 Path 现在变为 { L, B, S}。现在 LBS = 'R' 所以最终路径变为 { R} ,如前所述,这是正确的。现在让我们将这个算法转化为 Arduino 代码:
void CALCULATE_SHORTEST_PATH(char MAZE_ARRAY[], int SIZE_OF_ARRAY)
{
? /*ONCE THE ROBOT COMPLETES THE MAZE THE FINAL SHORTEST PATH CALCULATED
? IS STORED IN THE ROBOT MEMORY.THIS SHORTEST PATH IS USED TO COMPLETE
? THE SAME MAZE IN SHORTEST AMOUNT OF TIME.(L :LEFT, R:RIGHT, B:BACK,S:STRAIGHT)
? BELOW ARE THE FEW SUBSTITUTIONS TO CONVERT FULL MAZE PATH TO ITS?
? SHORTEST PATH:
? LBL = S
? LBR = B
? LBS = R
? RBL = B
? SBL = R
? SBS = B
? LBL = S */
? char ACTION;
??
? for(int i = 0; i <= SIZE_OF_ARRAY-2; i++)
? ? {
? ? ? ACTION = MAZE_ARRAY[i];
? ? ? ? ? ?
? ? ? if(ACTION == 'B')
? ? ? ? {
? ? ? ? ? if(MAZE_ARRAY[i-1]== 'L' && MAZE_ARRAY[i+1] == 'R')
? ? ? ? ? ? {
? ? ? ? ? ? ? MAZE_ARRAY[i] = 'B';
? ? ? ? ? ? ? MAZE_ARRAY[i-1] = 0;
? ? ? ? ? ? ? MAZE_ARRAY[i+1] = 0;
? ? ? ? ? ? ? REARRANGE(MAZE_ARRAY,SIZE_OF_ARRAY,i-1,i,i+1);?
? ? ? ? ? ? }
? ? ? ? ? ?if(MAZE_ARRAY[i-1]== 'L' && MAZE_ARRAY[i+1] == 'S')
? ? ? ? ? ? {
? ? ? ? ? ? ? MAZE_ARRAY[i] = 'R';
? ? ? ? ? ? ? MAZE_ARRAY[i-1] = 0;
? ? ? ? ? ? ? MAZE_ARRAY[i+1] = 0;
? ? ? ? ? ? ? REARRANGE(MAZE_ARRAY,SIZE_OF_ARRAY,i-1,i,i+1);
? ? ? ? ? ? }
? ? ? ? ? ? if(MAZE_ARRAY[i-1]== 'R' && MAZE_ARRAY[i+1] == 'L')
? ? ? ? ? ? {
? ? ? ? ? ? ? MAZE_ARRAY[i] = 'B';
? ? ? ? ? ? ? MAZE_ARRAY[i-1] = 0;
? ? ? ? ? ? ? MAZE_ARRAY[i+1] = 0;
? ? ? ? ? ? ? REARRANGE(MAZE_ARRAY,SIZE_OF_ARRAY,i-1,i,i+1); ? ? ? ??
? ? ? ? ? ? }
? ? ? ? ? ? if(MAZE_ARRAY[i-1]== 'S' && MAZE_ARRAY[i+1] == 'L')
? ? ? ? ? ? {
? ? ? ? ? ? ? MAZE_ARRAY[i] = 'R';
? ? ? ? ? ? ? MAZE_ARRAY[i-1] = 0;
? ? ? ? ? ? ? MAZE_ARRAY[i+1] = 0;
? ? ? ? ? ? ? REARRANGE(MAZE_ARRAY,SIZE_OF_ARRAY,i-1,i,i+1); ? ? ? ? ? ??
? ? ? ? ? ? }
? ? ? ? ? ? if(MAZE_ARRAY[i-1]== 'S' && MAZE_ARRAY[i+1] == 'S')
? ? ? ? ? ? {
? ? ? ? ? ? ? MAZE_ARRAY[i] = 'B';
? ? ? ? ? ? ? MAZE_ARRAY[i-1] = 0;
? ? ? ? ? ? ? MAZE_ARRAY[i+1] = 0;
? ? ? ? ? ? ? REARRANGE(MAZE_ARRAY,SIZE_OF_ARRAY,i-1,i,i+1); ? ? ? ? ? ??
? ? ? ? ? ? }
? ? ? ? ? ? if(MAZE_ARRAY[i-1]== 'L' && MAZE_ARRAY[i+1] == 'L')
? ? ? ? ? ? {
? ? ? ? ? ? ? MAZE_ARRAY[i] = 'S';
? ? ? ? ? ? ? MAZE_ARRAY[i-1] = 0;
? ? ? ? ? ? ? MAZE_ARRAY[i+1] = 0;
? ? ? ? ? ? ? REARRANGE(MAZE_ARRAY,SIZE_OF_ARRAY,i-1,i,i+1);
? ? ? ? ? ? }
? ? ? ? ? ??
? ? ? ? ? i = -1;
? ? ? ? }
? ? ? ?
? ? ? ?delay(100); ??
? ? }
}
最短路径算法可以用 3 个红外传感器吗?
如果您只使用 3 个红外传感器,那就很难了。为了使其工作,您必须使用 PID 算法使机器人遵循绝对直线路径。如果您的机器人遵循绝对直线路径,则只能在其中实现最短路径算法。
PID控制器
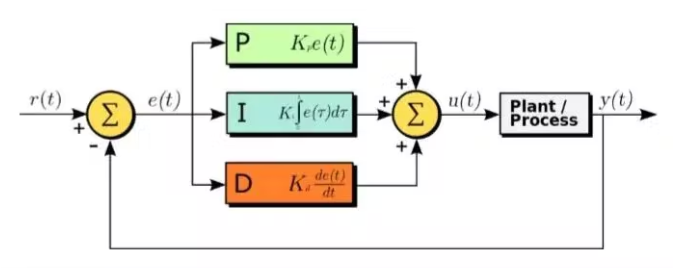
PID控制器中的PID代表比例积分和微分。这将在我们的机器人中用于遵循一条完全笔直的路径。先查看一下PID这个术语的意思:
1.Proportional:此项与误差(E)项成正比。误差越大,比例部分的值越大。该值负责机器人的转动。例如,如果误差很大,那么机器人的动作也会很强。所以基本上比例负责机器人的动作强度。比例的缺点是它会产生很多振荡。就像如果机器人只包含比例部分,那么车辆将继续从左到右摆动。好吧,它会直走,但会振荡很多。通过比例控制获得的增益用“KP”表示。
P = KP x Error
2. 积分:即使在微分部分消除了振荡之后,仍然存在小的偏移量。积分部分通过考虑所有误差来消除此偏移。积分项随时间增加。通过积分获得的增益用“KI”表示。
I = I + KI x Error
3 微分:微分项减少或消除了比例项产生的振荡。这将使机器人的运动更加顺畅。机器人将沿着一条直线前进,没有振荡。Derivative 获得的增益用“KD”表示。
D = KD x (Error - Previous_Error)/Time
PID 的公式由下式给出:
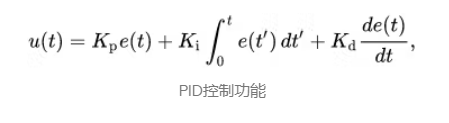
所以最终的PID值是通过将这些项相加得到的:
PID = P + I + D
PID 的主要目标是尽可能减少误差项。在继续编码之前,PID 控制器需要三个主要元素。
1. 反馈:反馈是一个过程,其中一部分输出用作迭代中的输入。在我们的案例中,反馈是由 MPU6050 提供的。我们得到了什么样的反馈?我们得到陀螺值作为反馈。
2.Actuator:这个东西起到改变系统输出的作用。它可以是伺服电机、直流电机或任何其他电机。在我们的例子中,执行器是机器人的两个直流电机。
3.SetPoint :这是我们想要达到的理想点或值。它是通过完全消除误差而获得的。
现在将这个理论转化为代码:
double PID_CONTROLLER(double FEEDBACK, double dt)
{
? double ERROR_VALUE;
? double PREVIOUS_ERROR_VALUE = 0;
? double SETPOINT =
? double KP =
? double KI =
? double KD =
? double P;
? double I;
? double D;
? double INTEGRAL;
? double DERIVATIVE;
? double OUTPUT_VALUE;
? ERROR_VALUE = SETPOINT - FEEDBACK; //Here the feedback is YAW from MPU6050
? P = KP*ERROR_VALUE;?
? INTEGRAL += ERROR_VALUE*dt;
? I = KI*INTEGRAL;
? DERIVATIVE += (ERROR_VALUE-PREVIOUS_ERROR_VALUE)/dt;
? D = KD*DERIVATIVE;
? OUTPUT_VALUE = P + I + D ;
? PREVIOUS_ERROR_VALUE = ERROR_VALUE;
? return OUTPUT_VALUE;
??
}
PID值的调整:
调整系统的 Kp、Ki 和 Kd 值的方法有很多,其中一种是手动调整,通过它可以轻松实现稳定性。最初,Kp、Ki 和 Kd 值设置为零。然后 Kp 值从零增加到系统开始从其平均位置振荡的点。
随着 Kp 值的增加,可以看出系统的响应逐渐增加。保持 Kp 值恒定,然后增加 Ki 值,直到从系统中可以看出,朝某个方向的小倾斜倾向于使车辆朝该方向加速。当正确获得 Kp 和 Ki 值时,则增加 Kd 值。Kd 值增加,从而显着降低了快速加速度。
适当的 KD 值会导致较小的过冲和振荡。在获得粗略的 Kp、Ki 和 Kd 值后,进行微调。以上步骤重复多次,得到增益值的最佳组合。
PID控制器
即使使用对称的底盘,您可能已经注意到机器人在沿线行驶时仍然会向左或向右移动,这是因为直流电机。爱好者使用的直流电机并不完美。没有两个电机是一样的。它们的机械结构之间总是存在细微差别。如果您的机器人遵循绝对直线路径,那么您很幸运,恭喜!但很多时候这种情况不会发生,机器人通常不会向左或向右移动。如果您不使用红外传感器阵列,这可能会影响您的最短路径算法。对 PID 的另一种需求是当您使用非常高的 RPM 电机时。
为了克服这个问题,有很多选择:
1.使用优质直流电机(不保证直线路径)
2.使用优质车轮(不保证直线路径)
3.使用高度机械精确的底盘(不保证直线路径)
4.降低一个电机的速度,使两个电机的速度完美匹配(但这样做后仍然存在微小的误差,使机器人几乎没有偏离轨道)。
5.使用旋转编码器(有时可能很好用)
6.使用PID控制器(如果编码完美,保证机器人的直线路径)。
在所有这些选项中,只有 PID 控制器可以保证机器人的绝对直线路径。
构造
机器人的构造非常简单。我很确定只有图像就足以让您构建硬件,所以我只提供图像。

最终成果
请注意,代码将仅是 LSRB 算法的实现。代码中有一个最短路径函数,您可以使用它来实现最短路径算法。您可以尝试使用该功能来实现 3 个红外传感器的最短路径。











 工商网监
工商网监
评论