 电子发烧友App
电子发烧友App


STM32独立看门狗简介
单片机系统在外界的干扰下会出现程序跑飞的现象导致出现死循环,看门狗电路就是为了避免这种情况的发生。看门狗的作用就是在一定时间内(通过定时计数器实现)没有接收喂狗信号(表示MCU已经挂了),便实现处理器的自动复位重启(发送复位信号)。
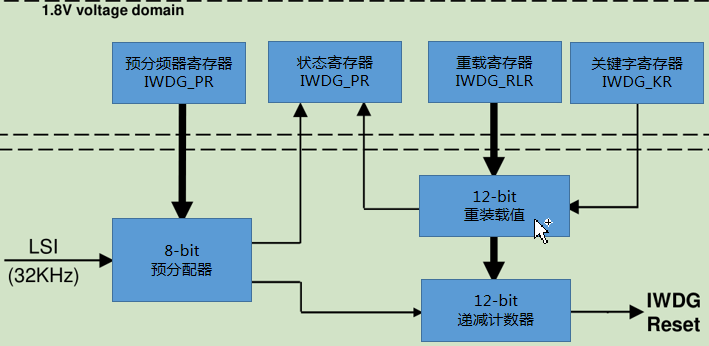
STM32的独立看门狗由内部专门的40Khz低速时钟驱动,即使主时钟发生故障,它也仍然有效。这里需要注意独立看门狗的时钟是一个内部RC时钟,所以并不是准确的40Khz,而是在30~60Khz之间的一个可变化的时钟,只是我们在估算的时候,以40Khz的频率来计算,看门狗对时间的要求不是很精确,所以,时钟有些偏差,都是可以接受的。
涉及的寄存器有:键寄存器IWDG_KR、预分频器IWDG_PR、重装载寄存器IWDG_RLR、状态寄存器|IWDG_SR。
功能描述:
在键值寄存器(IWDG_KR)中写入0xCCCC,开始启用独立看门狗;此时计数器开始从其复位值0xFFF递减计数。当计数器计数到末尾0x000时,会产生一个复位信号(IWDG_RESET)。无论何时,只要键寄存器IWDG_KR中被写入0xAAAA,IWDG_RLR中的值就会被重新加载到计数器中从而避免产生看门狗复位。
IWDG_PR和IWDG_RLR寄存器具有写保护功能。要修改这两个寄存器的值,必须先向IWDG_KR寄存器中写入0x5555。将其他值写入这个寄存器将会打乱操作顺序,寄存器将重新被保护。重装载操作(即写入0xAAAA)也会启动写保护功能。
还有两个寄存器,一个预分频寄存器(IWDG_PR),该寄存器用来设置看门狗时钟的分频系数。另一个重装载寄存器。该寄存器用来保存重装载到计数器中的值。该寄存器也是一个32位寄存器,但是只有低12位是有效的。
配置步骤:
1)取消寄存器写保护(向IWDG_KR写入0X5555)
2)设置独立看门狗的预分频系数和重装载值
3)重载计数值喂狗(向IWDG_KR写入0XAAAA)
4)启动看门狗(向IWDG_KR写入0XCCCC)
STM32独立看门狗程序
IWDG最适合应用于那些需要看门狗作为一个在主程序之外,能够完全独立工作,并且对时间精度要求较低的场合。
/******************************************************************************* ?
* ? ??
* 软件功能: ?独立看门狗实验 ?
* ??
*******************************************************************************/ ? ?
#include "stm32f10x.h" ?
#include "delay.h" ? ? ?
/*************************************************?
函数: void RCC_Configuration(void)?
功能: 配置系统时钟?
参数: 无?
返回: 无?
**************************************************/ ?
void RCC_Configuration(void) ?
{ ?
ErrorStatus HSEStartUpStatus; ? ? ? ? ? ? ? ? ? ?//定义外部高速晶体启动状态枚举变量 ?
RCC_DeInit(); ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?//复位RCC外部设备寄存器到默认值 ?
RCC_HSEConfig(RCC_HSE_ON); ? ? ? ? ? ? ? ? ? ? ? //打开外部高速晶振 ?
HSEStartUpStatus = RCC_WaitForHSEStartUp(); ? ? ?//等待外部高速时钟准备好 ?
if(HSEStartUpStatus == SUCCESS) ? ? ? ? ? ? ? ? ?//外部高速时钟已经准别好 ?
{ ?
FLASH_PrefetchBufferCmd(FLASH_PrefetchBuffer_Enable); //开启FLASH预读缓冲功能,加速FLASH的读取。所有程序中必须的用法.位置:RCC初始化子函数里面,时钟起振之后 ?
FLASH_SetLatency(FLASH_Latency_2); ? ? ? ? ? ? ? ? ? ?//flash操作的延时 ?
RCC_HCLKConfig(RCC_SYSCLK_Div1); ? ? ? ? ? ? ? //配置AHB(HCLK)时钟等于==SYSCLK ?
RCC_PCLK2Config(RCC_HCLK_Div1); ? ? ? ? ? ? ? ?//配置APB2(PCLK2)钟==AHB时钟 ?
RCC_PCLK1Config(RCC_HCLK_Div2); ? ? ? ? ? ? ? ?//配置APB1(PCLK1)钟==AHB1/2时钟 ?
RCC_PLLConfig(RCC_PLLSource_HSE_Div1, RCC_PLLMul_9); ?//配置PLL时钟 == 外部高速晶体时钟 * 9 = 72MHz ?
RCC_PLLCmd(ENABLE); ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? //使能PLL时钟 ?
while(RCC_GetFlagStatus(RCC_FLAG_PLLRDY) == RESET) ? ?//等待PLL时钟就绪 ?
{ ?
} ?
RCC_SYSCLKConfig(RCC_SYSCLKSource_PLLCLK); ? ? ? ? ? ?//配置系统时钟 = PLL时钟 ?
while(RCC_GetSYSCLKSource() != 0x08) ? ? ? ? ? ? ? ? ?//检查PLL时钟是否作为系统时钟 ?
{ ?
} ?
} ?
} ?
/**********************************************************************?
* 名 ? ?称:GPIO_Configuration()?
* 功 ? ?能:配置输入输出?
* 入口参数: ?
* 出口参数:?
-----------------------------------------------------------------------?
* 说明:使用库函数,配置IO口?
***********************************************************************/ ?
void GPIO_Configuration(void) ?
{ ?
GPIO_InitTypeDef ?GPIO_InitStructure; ?
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB , ENABLE); ? ?//给GPIOB提供时钟 ?
/*设置PB0为输出*/ ?
GPIO_InitStructure.GPIO_Pin ? = GPIO_Pin_0; ?
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_10MHz; ?
GPIO_InitStructure.GPIO_Mode ?= GPIO_Mode_Out_PP; ?
GPIO_Init(GPIOB, &GPIO_InitStructure); ?
} ?
/**********************************************************************?
* 名 ? ?称:IWDG_Configuration()?
* 功 ? ?能:看门狗配置?
* 入口参数: ?
* 出口参数:?
***********************************************************************/ ?
void IWDG_Configuration(void) ?
{ ?
IWDG_WriteAccessCmd(IWDG_WriteAccess_Enable); ? ? //访问之前要首先使能寄存器写 ?
IWDG_SetPrescaler(IWDG_Prescaler_64); ? ? ? ? ? ? //内部低速时钟16分频,即频率为:40K / 64 = ?0.625K,所以一个周期为:1.6ms ?
IWDG_SetReload(800); ? ? ? ? ? ? ?//800*1.6ms = 1.28S ?
IWDG_ReloadCounter(); //喂狗程序。软件必须以一定的间隔写入0xAAAA,否则,当计数器为0时,看门狗会产生复位 ?
IWDG_Enable(); ? ?//使能 ?
} ?
/**********************************************************************?
* 名 ? ?称:main()?
* 功 ? ?能:主函数?
* 入口参数: ?
* 出口参数:?
***********************************************************************/ ?
int main (void) ??
{ ?
RCC_Configuration(); ?//配置时钟 ? ? ? ? ? ? ? ? ? ? ? ?
GPIO_Configuration(); //配置IO口 ?
IWDG_Configuration(); //配置看门狗 ?
delay_init(72); ?
GPIO_SetBits(GPIOB,GPIO_Pin_0); ?
delay_ms(300); ?
GPIO_ResetBits(GPIOB,GPIO_Pin_0); ?
while(1) ?
{ ? ??
delay_ms(10);?
//IWDG_ReloadCounter(); ? ?//喂狗程序。软件必须以一定的间隔写入0xAAAA,否则,当计数器为0时,看门狗会产生复位,正常使用时应去除此行注释??









 工商网监
工商网监
评论