 简要说明ML4425的工作原理
简要说明ML4425的工作原理

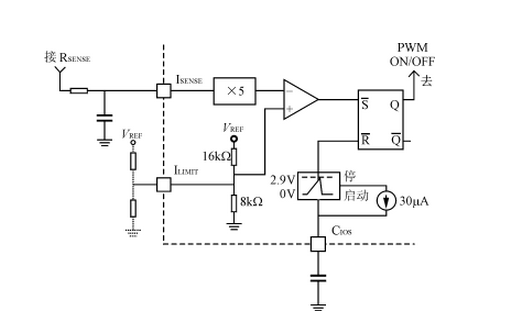
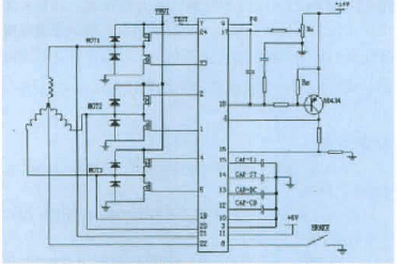
ML4425的整个运行状态可分为三种。第一种为复位校准状态,复位校准的时间由外接的起动电容CAT决定。复位校准时刻,上桥臂HA、HC和下桥臂LB导通,电机转子在磁力线的作用下慢慢转动,使得磁极中心线与B相绕组中心线重合;复位校准状态完成后,起动脚CAT由低电平慢慢变为高电平2.01V,同时片内压控振荡器开始起振,系统进入开环升速状态。电机转速升至可产生足够大的反电动势后,系统进人闭环换相状态。当20脚SPEED FB小于8脚SPEEDSET设定电压时,电机处于加速状态。在此期间,电机受到由12脚/LIMIT的控制,控制下桥N型通道的驱动,占空比为100%。当20脚SPEED FB接近8脚SPEED SET设定电压时,电机进人PWM稳定控制状态。此时6脚外接电容CT开始充电,产生频率为50μA/2·4V×CT的PWM锯齿波。此锯齿波通过与8脚SPEED SET设定电压相比较,产生PWM波形,控制下桥N型通道的功率驱动,进而对电机进行速度控制。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
压控振荡器
+关注
关注
10文章
166浏览量
29788 -
上桥臂
+关注
关注
0文章
4浏览量
8691 -
ML4425
+关注
关注
0文章
5浏览量
11198
发布评论请先 登录
相关推荐
热点推荐
请问参与竞标时应该做什么类型的简要说明?
参与竞标时,提示“请输入您能够完成任务的简要说明并且上传相应附件资料”,如贴主需要一个温控开关系统,“简要说明”是否为所需芯片,如何做出来等;附件又该是什么?现象?
发表于 08-01 05:00
熔丝位简要说明
熔丝位简要说明熔丝位功能配置说明 熔丝低位CKDIV8时钟8分频0:时钟8分频 1:时钟不分频 CKOUT时钟输出0:系统时钟输出(PB0) 1:不输出 SUT1选择启动时间根据时钟源选择..
发表于 07-21 07:29
Socket API简要说明
Socket API简要说明:创建套接字 ( socket ) int socket(int domain, int type ,int protocol);参数描述domain协议族类型type
发表于 01-11 07:26
基于ML4425的无人机设计项目
描述无传感器 BLDC 电机驱动器大家好,由于无人机已经习惯了很多领域,我想我应该做关于无人机的毕业设计。经过搜索,我决定使用 ML4425 微控制器,它是无传感器 BLDC 电机控制器。在
发表于 07-19 07:15
无传感器的直流无刷电机控制器ML4425及其应用(1)
无传感器的直流无刷电机控制器ML4425及其应用(1)??
摘要:介绍了ML4425脉宽调制电机控制器的功能及其应用。
关
发表于 07-09 10:31
?3428次阅读
进行对无刷电机控制器ML4425/4426的介绍并运用
ML4425/4426是Micro Linear公司推出的智能型无刷电机专用控制器,可用于为三相无刷电机提供封闭回路的换向控制信号,同时利用PWM模式还可对电机速度进行控制并对电机进行必要的保护。ML4425/4426的特点如下:
ML4425对无位置传感器电机驱动的注意事项
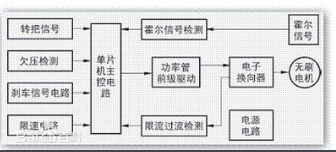
直流电机的主控制芯片。ML4425是MicroLinear公司推出的一种智能型无位置传感器永磁无刷电机控制器专用电路。该电路内置起动电路、锁相环逻辑换相电路、PWM速度控制电路和过电流保护电路。该芯片集成度高,应用范围广,适合各种负载和电压的Δ形或Y形绕组的无刷电机控制系统。





 工商网监
工商网监
评论