 图像传感器实际上是如何工作的
图像传感器实际上是如何工作的

以下文章来源于OpenFPGA,作者碎碎思
介绍
FPGA 广泛应用于各种图像处理应用,包括医疗和科学成像、空间成像、汽车和国防领域。
不管用哪种解决方案,高级算法可能不一样,但最基础的部分都是一样的:它们都得先跟图像传感器或者摄像头连接,把拍到的画面处理一下,然后整理成视频流,好让显示器显示或者通过网络传出去。
在本项目中,我们将详细了解使用图像传感器时涉及的不同阶段和元素。
我们将从头开始:图像传感器实际上是如何工作的。
图像传感器如何工作?
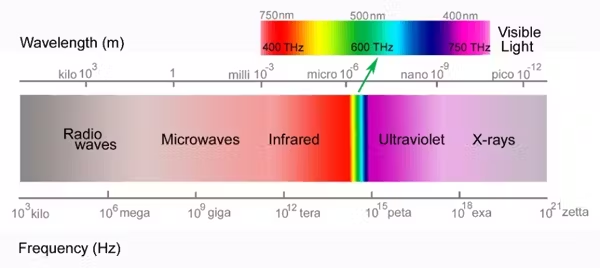
图像传感器是一种神奇的设备,因为它们不仅使我们能够看到可见光谱内的东西,而且还使我们能够看到人类可见光范围之外的东西,例如X射线和红外线。
图像传感器主要基于两种技术:
电荷耦合器件(CCD)
CMOS图像传感器(CIS)
电荷耦合器件- 利用势阱形成像素阵列,势阱在入射光子撞击像素时形成。在积分时间(即捕获图像的时间)内,撞击像素的光子产生的电荷会累积,就像水灌满桶一样,将势阱填满。积分时间结束时,逐个像素输出,将电荷转换为电压。
其工作原理类似于移位寄存器:定时信号将存储信号移位通过像素阵列。为了加快读取速度,可以实现多个输出通道。CCD 是模拟的,信号的定时和电压电平会影响数据传输和图像的整体质量。通常使用外部 ADC 将像素电压转换为数字表示,以便进一步处理。
CCD 如今已不太常见,但由于其卓越的性能,仍用于天文学和空间成像等高端成像应用。
CMOS 图像传感器- CIS 使用光电二极管形成像素阵列,在每个像素上将光子转换为电压。该模拟电压直接在芯片上转换为数字输出。
这种转换方式比CCD读取速度更快,但是CIS的噪声性能通常较差。如今大多数相机都使用CIS,因为它们更易于操作和数字化集成。
可见光谱外成像
如果我们想要在可见光谱之外成像,就必须选择合适的设备。CMOS 和 CCD 传感器都可以捕获 X 射线到近红外 (NIR) 波长。
随着波长向红外光谱方向递减,电子能量也随之降低,需要比硅更先进的半导体。根据观察到的光谱,典型的器件包括:
电荷耦合器件(CCD):X射线到可见光,延伸至近红外。
CMOS图像传感器(CIS):X射线到可见光,延伸至近红外。
非制冷红外:微测辐射热计,通常在中红外范围内工作。
冷却红外线:需要冷却的基于 HgCdTe 或 InSb 的解决方案。
线扫描或二维扫描
当我们观看静止图像或视频帧时,它是二维的。然而,如何创建二维图像则取决于具体应用。
例如,如果目标物体正在移动(例如在生产线上),可以使用单行像素,并通过移动生成二维图像。这种方法在生产线检测和轨道卫星成像中很常见,因为轨道的运动提供了生成图像所需的运动。
更常见的替代方法是使用 2D 传感器,无需移动即可捕获 2D 图像。
传感器性能
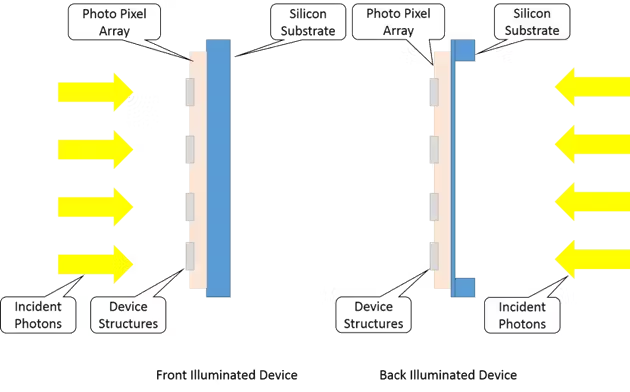
图像传感器的一个关键性能指标是量子效率 (QE)。QE 测量的是入射到器件的光子数与像素中检测到的光子数之比。
当制造图像传感器时,设备上的结构可以降低前照式设计中的 QE(即光子撞击传感器的前部)。
为了实现更好的量子效率 (QE),人们采用了背照式设计,以减少结构对光子探测的影响。然而,背照式设计需要额外的工艺,这会降低良率并增加成本。
卷帘快门或全局快门
使用二维图像传感器时,我们经常需要确定图像传感器上快门的类型。快门主要有两种类型:
卷帘快门:每行在其积分时间之后读出,但是捕获的图像可能会因运动而损坏。
全局快门:整个阵列同步并作为一个整体读出。
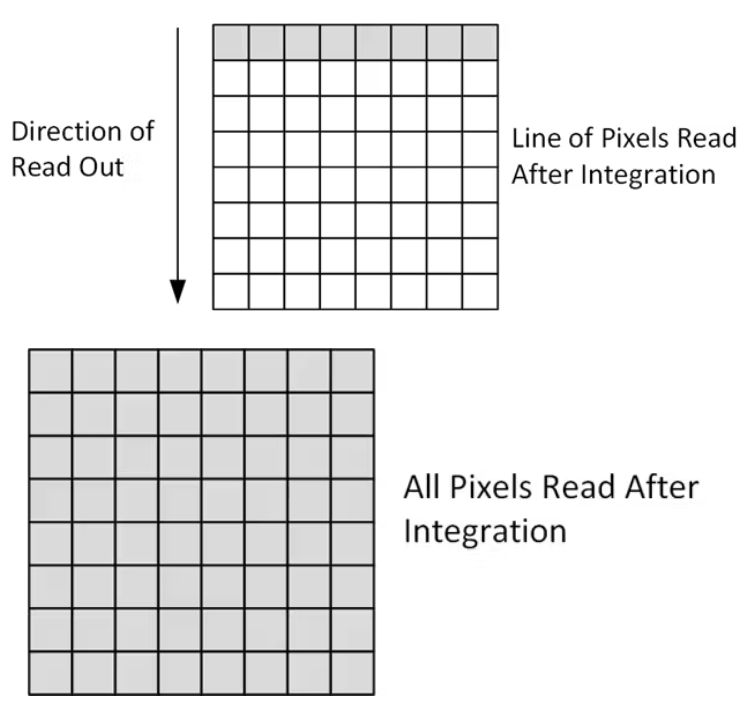
我相信我们都在网上看过这样的视频:直升机在飞行,但旋翼却似乎没有动。这是因为卷帘快门与卷帘上的旋翼叶片同步,导致旋翼叶片看起来静止不动。
彩色或灰度
对于大多数人来说,我们通过眼睛感知世界的方式是彩色视觉。然而,到目前为止,我们只讨论了像素、电荷的积累,以及电荷转化为电压,再转化为数字格式的过程。
所有波长的光子在一个像素上混合,并转换成代表图像的电压。如果我们在图像处理应用程序中按原样处理这些信息,结果将是一幅灰度图像。
灰度图像用于许多应用,因为它们提供亮度信息,这对于分析亮度、对比度、边缘、形状、轮廓、纹理、透视和阴影至关重要。
灰度运算也具有计算效率高的特点,因为只需处理单个通道的数据。此外,使用阈值处理很容易将灰度图像转换为二值图像,从而实现形态学运算。
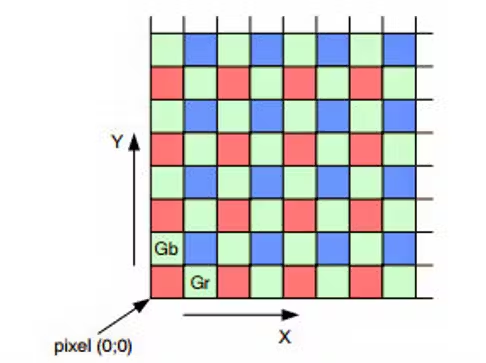
为了获得彩色图像,需要在传感器上直接应用一个特定的光学滤镜。这个滤镜被称为拜耳掩模,它覆盖每个像素,只允许一种波长的光(红色、绿色或蓝色)通过。
每个像素仅捕获红色、绿色或蓝色光子。这些滤光片通常排列成 2x2 的网格,包含一个红色像素、一个蓝色像素和两个绿色像素。这种排列会突出绿色,因为它位于可见光谱的中间,而人眼对绿光更敏感。
去拜耳化过程
拜耳掩模需要后期处理才能重建全彩图像。在 FPGA 中,我们可以处理像素流,对原始数据进行反拜耳处理,使用 2x2 网格将每个像素转换为 RGB 值。
此过程涉及网格中相邻像素之间的插值。虽然有效,但由于需要插值来填充缺失的颜色信息,可能会导致图像分辨率略有损失。
色彩空间
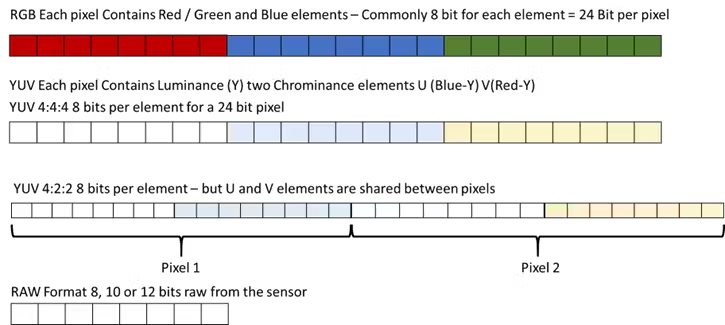
如果我们决定处理 RGB 图像,还需要考虑颜色空间。通常,我们从 RGB 颜色空间开始。假设每个颜色通道(R、G、B)8 位,则每个像素需要 24 位。
在 FPGA 中,可以轻松实现任意总线大小。但是,由于 24 位格式,将这些数据存储在内存(例如 DDR3 或 DDR4)中效率不高。
为了提高内存效率,我们可以使用更紧凑的色彩空间,例如 YUV,它将亮度 (Y) 和色度(U 和 V)通道分开。在 YUV 色彩空间中,两个像素可以共享 U 和 V 通道,从而将存储需求降低到每像素 16 位,从而提高效率。
此外,较窄的总线宽度简化了 FPGA 内的布线,使实现更容易且可能更具成本效益。
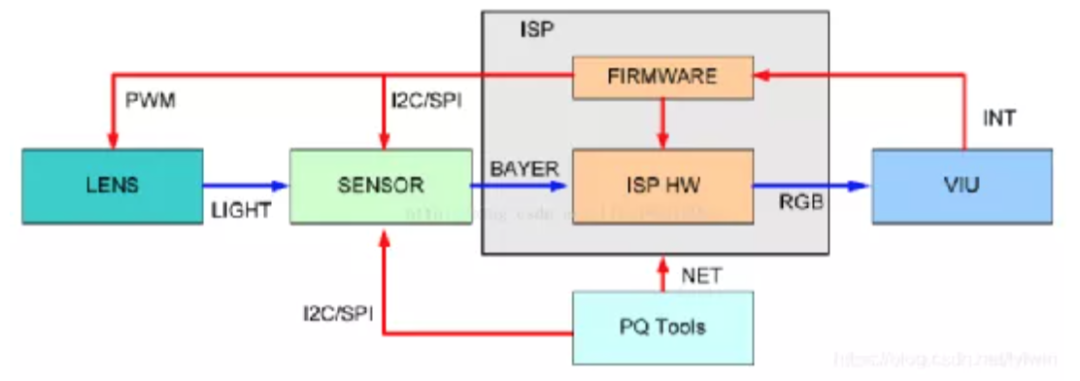
与传感器和摄像头接口
现在我们了解了图像传感器的工作原理,我们可以探索传感器如何与 FPGA 连接。
主要有两种方法:
相机集成传感器:传感器嵌入在执行大部分接口的相机中,并输出图像以供进一步处理。
直接传感器接口:FPGA 直接与传感器接口,需要额外的控制和信号处理。
无论采用何种方法,FPGA I/O 都是多功能的,能够与摄像机和传感器连接。
我们先来看一下一些常用的接口标准:
HDMI(高清多媒体接口)- HDMI 通常用于相机,尤其是紧凑型运动相机。FPGA 可以使用最小化传输差分信号 (TMDS) 标准直接与 HDMI 接口。AMD 7 系列 FPGA、UltraScale 器件和 UltraScale+ 器件均支持此功能。
对于分辨率更高的图像,其性能可能超出高清 (HD) 存储体的性能,可以使用千兆收发器。HDMI 通过三个差分通道(分别用于红、绿、蓝)和一个用于时钟信号的附加通道传输视频数据。
SDI(串行数字接口)视频- SDI 是一种通过带有 BNC 连接器或光纤的同轴电缆传输未压缩的数字视频、音频和元数据的专业标准。
支持的分辨率:范围从标准清晰度(SD-SDI)到超高清(12G-SDI)。
应用:由于其高质量、低延迟性能和对长电缆传输的支持,非常适合广播和现场制作。
FPGA 支持:当与 AMD FPGA 或 SoC 连接时,SDI 使用千兆收发器。
SDI 视频信号通过专用硬件 IP 核进行处理,可提供:
支持各种SDI标准。诸如视频缩放、色彩空间转换和多路复用等功能。
这些核心能够实现与专业视频工作流程的强大而灵活的集成。
Camera Link - Camera Link 使用多个 LVDS(低压差分信号)通道将数据从相机传输到帧采集器(在 Camera Link 标准中,帧采集器就是我们的 FPGA)。Camera Link 使用四对 LVDS 线传输数据,第五对 LVDS 线传输时钟。
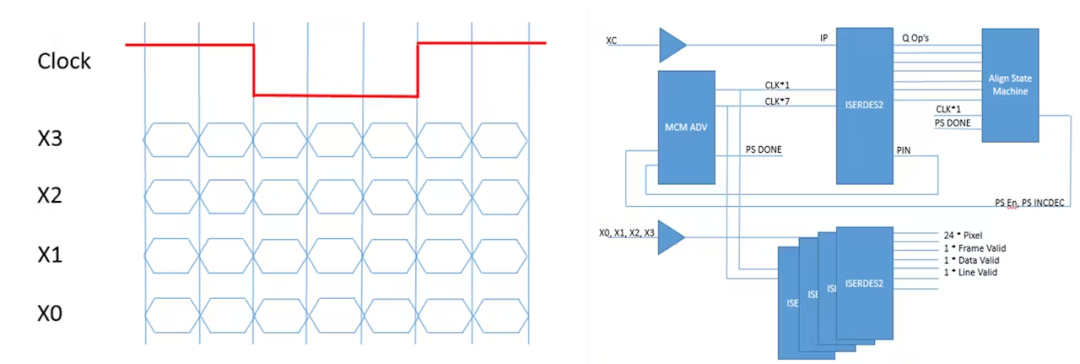
并行/串行 -许多相机或传感器提供并行或串行输出,其方式可以通过反串行化来重建像素数据、相关帧以及行有效信号。这可以使用 LVDS/SLVS(可扩展低压信号)等实现。如果采用串行化,则可以使用 FPGA IO 提供的 IO 结构来同步和正确解码数据流。
MIPI (移动行业处理器接口)- MIPI 是最广泛使用的传感器接口之一。它是一种高带宽、点对点协议,旨在通过多个差分串行通道传输图像传感器或显示数据。
协议层:MIPI 跨各种 OSI 模型层运行,最低的是 DPHY 层。
DPHY 定义了通道数、时钟以及差分信号 (SLVS) 与单端信号 (LVCMOS) 之间的转换。
该组合支持CSI-2(摄像机串行接口)和DSI(显示器串行接口)等协议的高带宽数据传输。
低速通信允许以较低的功率水平有效传输控制信息。
表现:
每个 MIPI DPHY 链路可支持 1 至 4 个高速串行通道,每通道运行速度高达 2.5 Gbps,或四通道运行速度高达 10 Gbps。
数据传输以两倍数据速率进行,与时钟通道同步。
FPGA支持:
AMD UltraScale+ 设备和 Versal 自适应 SoC 原生支持 MIPI DPHY。
对于 AMD 7 系列 FPGA 和 UltraScale 设备,可以使用外部电阻网络或定制 DPHY 电路实现 MIPI DPHY。
利用可编程逻辑和 IP 库
FPGA的核心理念是尽可能多地利用 Vivado 设计套件和 Vitis 平台 IP 库中的现有 IP(知识产权)。这些库提供了丰富的预设计组件,能够高效地实现复杂的功能。
用于视频传输的 AXI Stream
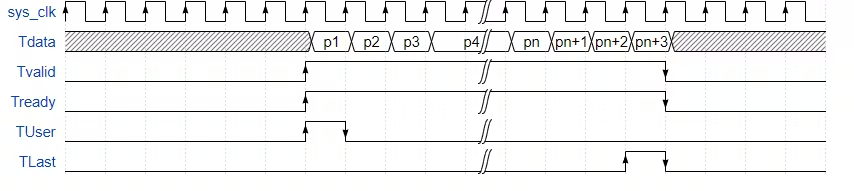
视频处理流水线中的大多数接口都使用 AXI Stream 协议在模块之间传输视频流。AXI Stream 的核心操作主要使用以下信号:
TData:将数据有效载荷从主机传送到从机。
TValid:表示 TData 总线上有有效数据。
TReady:来自从属设备的信号,表示它已准备好接受数据。
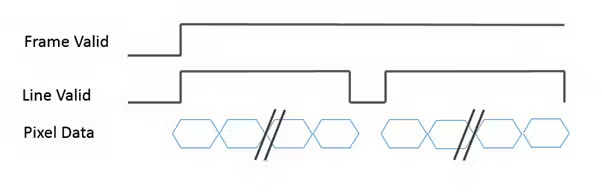
视频数据标记
对于视频流,需要额外的标记来指示帧的开始和行的结束,以便可以构建和处理完整的 2D 图像。
为了实现这一目标,AXI Stream 引入了:
TUse信号:表示新帧的开始。
TLast信号:标记视频流中一行的结束。
这些标记确保视频数据的正确同步和重建,使 AXI Stream 协议非常适合处理 FPGA 中的 2D 图像和视频处理。
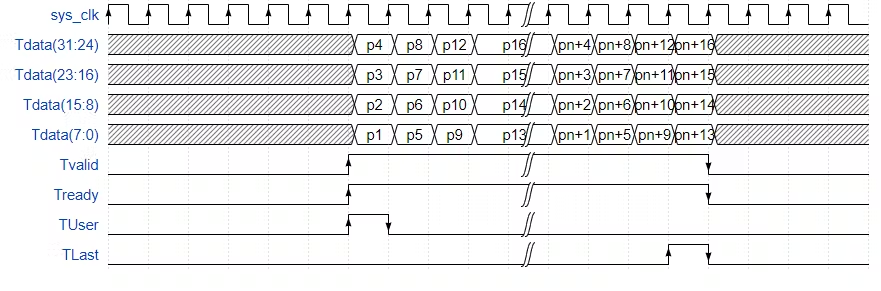
了解了 AXI Stream 的概念及其在图像处理流传输中的应用后,我们现在可以探索如何利用 FPGA 的并行特性。一种有效的方法是将多个像素包含在单个 AXI Stream 数据流中。
通过每个时钟周期传输多个像素,可以显著提高图像处理管道的吞吐量。
在 AXI Stream 中利用 FPGA 并行性
了解了 AXI Stream 的概念及其在图像处理流传输中的应用后,我们现在可以探索如何利用 FPGA 的并行特性。一种有效的方法是将多个像素包含在单个 AXI Stream 数据流中。
通过每个时钟周期传输多个像素,可以显著提高图像处理管道的吞吐量。
AXI Stream 中的像素并行性
通常,AXI Stream 可以配置为每个时钟周期传输 1、2 或 4 个像素,具体取决于应用和系统要求。例如,当每个时钟周期输出 4 个像素时,整体数据速率和处理效率会显著提高,如下例所示。
这种并行性不仅增强了基于 FPGA 的图像处理流水线的性能,而且还确保了高分辨率和高帧率视频流的无缝处理。
FPGA 图像处理流水线架构
在可编程逻辑中实现图像处理流水线时,需要考虑两种主要架构:
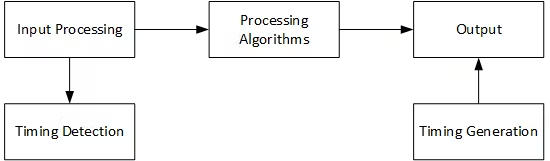
1. 直接架构
在直接架构中,输入直接连接到处理阶段和输出,具有最少的缓冲并且没有帧缓冲。
优点:这种方法提供了输入和输出之间的最低延迟,使其成为延迟至关重要的应用的理想选择,例如自动驾驶汽车或实时视频分析。
局限性:由于没有帧缓冲,这种架构对于需要时间数据存储或同步的任务来说灵活性较差。
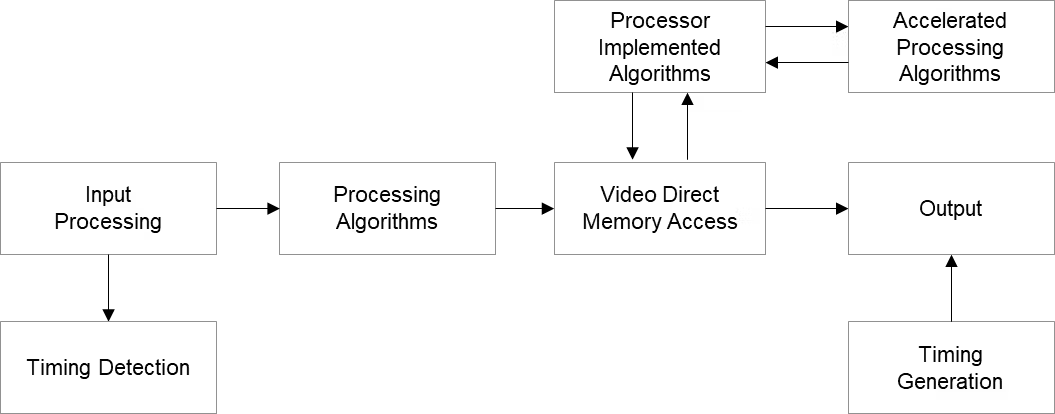
2. 帧缓冲架构
帧缓冲架构利用内存来缓冲一个或多个帧。
优点:在以下情况下使用此方法:
需要向相关处理系统中的处理器提供该图像。
需要修改视频流的输出时间(例如,为了同步或与其他组件兼容)。
用例:帧缓冲架构在灵活性和时间调整比延迟问题更重要的应用中很常见。
管道配置
无论选择哪种图像处理架构(直接还是帧缓冲),设计中使用的 IP 核都需要通过 AXI Lite 进行正确的配置。
AXI Lite 配置:
设置图像尺寸(宽度和高度)。
启用 IP 核功能。
控制核心的处理算法。
示例:直接方法图像处理管道
对于此应用程序,我们将创建一个使用直接方法实现的示例图像处理管道。
这意味着从输入到输出无需帧缓冲,从而确保从输入帧到输出帧的最小延迟。为了实现这一点,我们必须最大限度地减少整个流水线的缓冲。
目标设备
该设计的目标设备是 AMD Kintex 7 FPGA,具体使用 Digilent Genesys 2 开发板,其特点是:
HDMI 输入和输出接口:非常适合从运动相机或测试设备捕捉图像并将其显示在屏幕上。
该设计将利用 Vivado,并可分为两个主要部分:
图像处理管道
使用 AMD MicroBlaze V 进行控制和配置
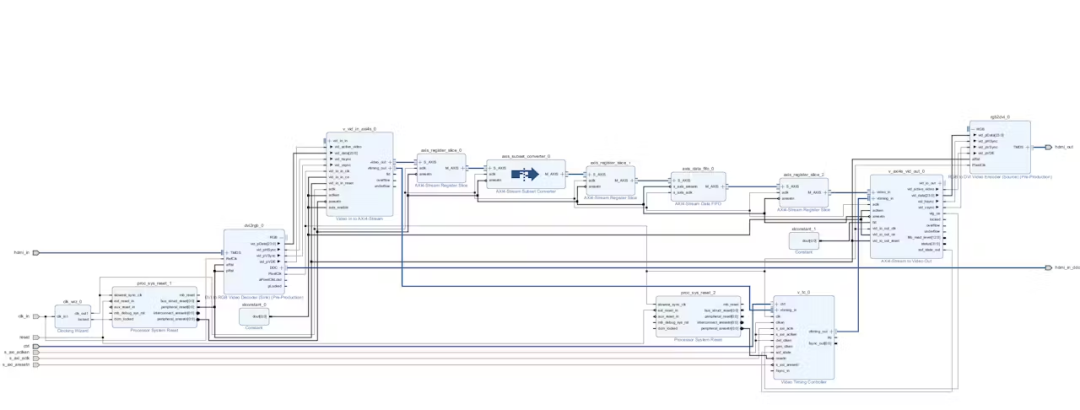
管道设计
该管道将:
通过 HDMI 接收数据:将其从具有垂直和水平同步信号的并行视频格式转换为 AXI 流。
将视频流转换为 AXI Stream:AXI Stream 是大多数图像处理块使用的标准接口。
通过 AXI Stream 将数据输出到视频输出:这在视频时序发生器的控制下生成并行视频。
使用 AMD MicroBlaze V 处理器进行控制
管道和相关的视频时序生成器将由基于 RISC-V 指令集架构的 AMD MicroBlaze V 处理器控制。
与之前使用 VDMA(视频直接内存访问)的示例不同,此应用程序将不使用 VDMA 来确保输入和输出之间的最低延迟。
AMD Vivado 设计套件组件
图像处理流水线将使用以下IP核:
DVI2RGB:用于将 DVI 转换为 RGB 格式的 Digilent IP 核。
视频输入到 AXI Stream:Vivado Design Suite IP 块用于将 RGB 视频转换为 AXI Stream 格式。
AXI Stream 到视频输出:Vivado Design Suite IP 块用于将 AXI Stream 转换回 RGB 格式。
视频时序控制器:配置用于检测输入时序并生成输出时序。如有需要,此配置还将支持未来的 VDMA 应用。
AXI Stream FIFO:以数据包模式配置,在线路通过之前对其进行缓冲。
AXIS 寄存器切片:在管道内添加以帮助时序收敛。
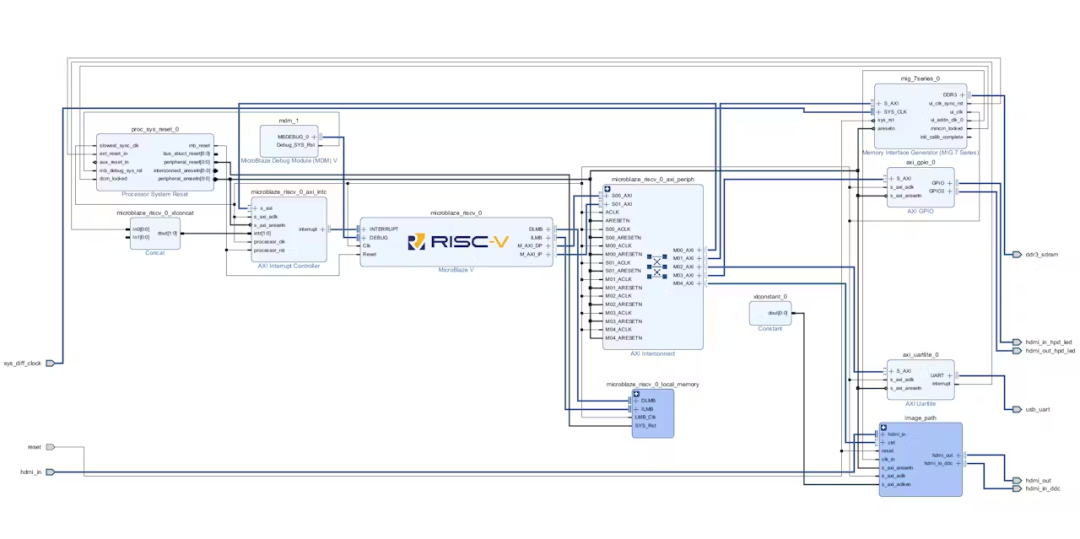
AMD MicroBlaze V 处理器子系统
AMD MicroBlaze V 处理器控制器子系统配置为微控制器。此配置支持 AXI 外设数据和指令接口,并通过 AXI 互连连接到:
UartLite:用于 UART 控制台通信的 Vivado Design Suite IP 块。
AXI GPIO:监控显示器和摄像头热插拔检测信号。
AXI 中断控制器:处理处理器中断。
MicroBlaze V 处理器调试模块:支持使用 Vitis 平台进行调试。
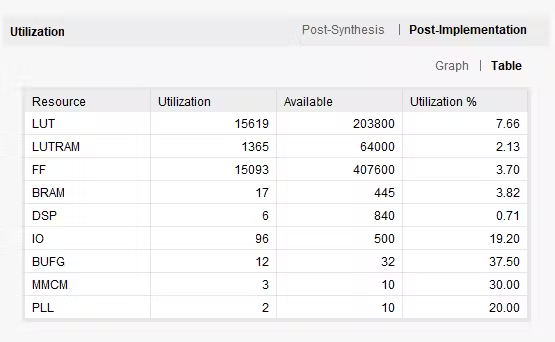
设备利用率如下所示:
该软件运行在AMD Vitis平台开发的AMD MicroBlaze V处理器上。
#include#include"platform.h" #include"xil_printf.h" #include"xvtc.h" #include"xgpio.h" #include"vga.h" #include"xparameters.h" XVtc VtcInst; XVtc_Config *vtc_config ; XGpio hpd_in; XVtc_SourceSelect SourceSelect; intmain() { u16 result; VideoMode video; XVtc_Timing vtcTiming; init_platform(); printf("Setting up VTC "); vtc_config = XVtc_LookupConfig(XPAR_XVTC_0_BASEADDR); XVtc_CfgInitialize(&VtcInst, vtc_config, vtc_config->BaseAddress); //configure and assert the HPD XGpio_Initialize(&hpd_in, XPAR_XGPIO_0_BASEADDR); XGpio_DiscreteWrite(&hpd_in,1,0x1); sleep(20); XGpio_DiscreteWrite(&hpd_in,2,0x1); ///needs time here video = VMODE_1280x720; vtcTiming.HActiveVideo = video.width; /**< Horizontal Active Video Size */ ?vtcTiming.HFrontPorch = video.hps - video.width; /**< Horizontal Front Porch Size */ ?vtcTiming.HSyncWidth = video.hpe - video.hps; ?/**< Horizontal Sync Width */ ?vtcTiming.HBackPorch = video.hmax - video.hpe + 1; ?/**< Horizontal Back Porch Size */ ?vtcTiming.HSyncPolarity = video.hpol; /**< Horizontal Sync Polarity */ ?vtcTiming.VActiveVideo = video.height; /**< Vertical Active Video Size */ ?vtcTiming.V0FrontPorch = video.vps - video.height; /**< Vertical Front Porch Size */ ?vtcTiming.V0SyncWidth = video.vpe - video.vps; /**< Vertical Sync Width */ ?vtcTiming.V0BackPorch = video.vmax - video.vpe + 1;; /**< Horizontal Back Porch Size */ ?vtcTiming.V1FrontPorch = video.vps - video.height; /**< Vertical Front Porch Size */ ?vtcTiming.V1SyncWidth = video.vpe - video.vps; /**< Vertical Sync Width */ ?vtcTiming.V1BackPorch = video.vmax - video.vpe + 1;; /**< Horizontal Back Porch Size */ ?vtcTiming.VSyncPolarity = video.vpol; /**< Vertical Sync Polarity */ ?vtcTiming.Interlaced = 0; ? ? memset((void *)&SourceSelect, 0, sizeof(SourceSelect)); ?SourceSelect.VBlankPolSrc = 1; ?SourceSelect.VSyncPolSrc = 1; ?SourceSelect.HBlankPolSrc = 1; ?SourceSelect.HSyncPolSrc = 1; ?SourceSelect.ActiveVideoPolSrc = 1; ?SourceSelect.ActiveChromaPolSrc= 1; ?SourceSelect.VChromaSrc = 1; ?SourceSelect.VActiveSrc = 1; ?SourceSelect.VBackPorchSrc = 1; ?SourceSelect.VSyncSrc = 1; ?SourceSelect.VFrontPorchSrc = 1; ?SourceSelect.VTotalSrc = 1; ?SourceSelect.HActiveSrc = 1; ?SourceSelect.HBackPorchSrc = 1; ?SourceSelect.HSyncSrc = 1; ?SourceSelect.HFrontPorchSrc = 1; ?SourceSelect.HTotalSrc = 1; ?XVtc_RegUpdateEnable(&VtcInst); ?XVtc_SetGeneratorTiming(&VtcInst, &vtcTiming); ?XVtc_SetSource(&VtcInst, &SourceSelect); ?XVtc_EnableGenerator(&VtcInst); ?XVtc_Enable(&VtcInst); ?XVtc_EnableDetector(&VtcInst); ?XVtc_Enable(&VtcInst); ?xil_printf("Video Mode = %i ", result); ?xil_printf(" "); ? ??printf("VTC Set Up "); ? ? cleanup_platform(); ? ??return?0; }
-
FPGA
+关注
关注
1648文章
22143浏览量
622593 -
CMOS
+关注
关注
58文章
6069浏览量
239645 -
二极管
+关注
关注
148文章
10193浏览量
173301 -
图像传感器
+关注
关注
68文章
1997浏览量
131096
原文标题:灯光、镜头和FPGA逻辑
文章出处:【微信号:FPGA研究院,微信公众号:FPGA研究院】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
ISSCC上的最新图像传感器技术
CCD图像传感器的工作原理和特点
美光引领图像传感器市场
线性温度传感器大的工作原理及应用
安森美半导体的标准及定制CMOS图像传感器方案
称重传感器实际电路原理分析





 工商网监
工商网监
评论