 激光雷达在自动驾驶汽车的应用
激光雷达在自动驾驶汽车的应用

引言
激光雷达 (LIDAR)是指光探测与测距技术,有时亦称为飞行时间 (ToF) 或激光扫描仪,是一种探测物体并测量其距离的检测方式。这一技术的工作原理是使用光脉冲照射某个目标,然后测量反射返回信号的特性。光脉冲宽度在数纳秒到数微秒间不等。
图 1 所示为激光雷达的基本原理,即以特定模式发射光信号,然后根据接收端收集的反射信号提取信息。用于从光信号提取信息的常见参数包括脉冲功率、往返时间、相移和脉宽。
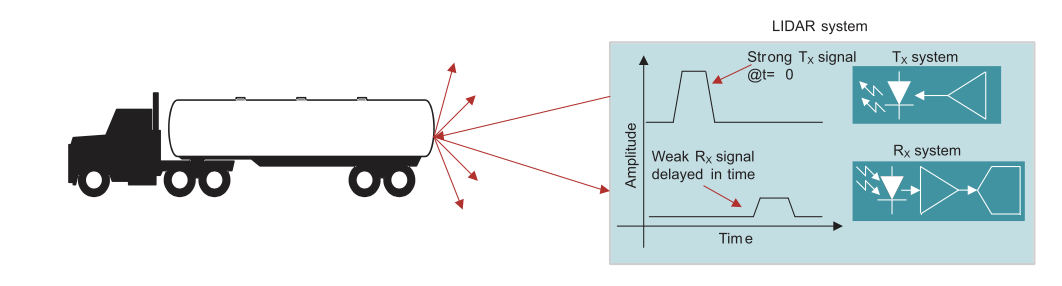
图 1:基于脉冲飞行时间的激光雷达系统
为什么选择光信号?与雷达、超声波传感器或摄像头等其他现有技术相比,激光雷达有什么特殊之处?是什么让激光雷达广受推崇?远距离激光雷达将成为自动驾驶应用的重要传感器,本白皮书将探讨与之相关的各类问题。除自动驾驶车辆外,激光雷达也应用于3D 航空和地理测绘、工厂安全系统、灵巧弹药和气体分析。
自动驾驶汽车的检测和成像
制造商正在为现代汽车配备各种各样的高级控制和感应功能。碰撞警告和防撞系统、盲点监控、车道保持辅助、车道偏离警告和自适应巡航控制系统,可协助驾驶员并实现某些驾驶操作的自动化,从而提供更安全、更轻松的驾驶体验。
激光雷达、雷达、超声波传感器和摄像头都有各自的优缺点。高度或完全自动驾驶的车辆通常使用多种传感器技术,在各种天气和照明条件下提供车辆四周的远距离和近距离准确地图。除了利用多种技术取长补短,保持足够的重叠对提高冗余和安全性也至关重要。传感器融合是利用多种传感器技术生成汽车周围环境的精确可靠地图。
超声波在空气中传播几米后会大幅衰减,因此,超声波传感器主要用于短距离物体检测。
摄像头是随处可见、具有成本效益的传感器,但是需要经过大量处理工作才能提取有用信息,而且它在很大程度上依赖环境光条件。摄像头的独特之处在于,它们是唯一能“识别颜色”的技术。因此,汽车使用摄像头可实现车道保持辅助功能。
激光雷达和成像雷达具有各种常见的互补功能,如提供周围环境地图和测量物体速率。我们从几个类别对这两种技术进行对比:
距离:激光雷达和成像雷达系统能检测几米到 200m 以上距离范围内的物体。成像雷达无法检测近距离物体。雷达可以检测 1m 以内到 200m以外的物体,具体取决于系统类型:短距离、中距离或远距离雷达。
空间分辨率:这才是激光雷达的关键所在。凭借其激光准直功能和短波长(905nm 至 1,550nm)特性,激光雷达可实现约 0.1 度的红外 (IR) 光空间分辨率。因此,即使不进行大量的后端处理,也能对场景中的物体进行高分辨率的 3D 特征描述。另一方面,由于波长(77GHz,4mm)限制,雷达在远距离解析细微特征方面存在困难。
视场 (FOV):固态激光雷达和雷达均具有出色的水平 FOV(方位角),而机械式激光雷达系统通过 360° 旋转,在所有高级驾驶辅助系统 (ADAS) 技术中具有超宽的 FOV。一直以来,激光雷达具有比一般雷达更广的垂直 FOV(仰角)。激光雷达可提供角分辨率(方位角和仰角视角),这是优化物体分类所需的一个主要特性。
天气条件:雷达系统最大的优势之一是其在雨、雾和雪等天气中的可靠性。而激光雷达的性能在上述天气条件下一般会有所下降。借助 1,550nm 的红外波长,激光雷达可在恶劣天气条件下实现更优的性能。
环境光:激光雷达和摄像头均易受环境光条件的影响。然而在夜间,激光雷达和成像雷达系统能展现出极高的性能,因为它们都自带照明。雷达和调制激光雷达技术均不受其他传感器的干扰。
成本和尺寸:雷达系统近年来已成为主流,尺寸高度紧凑,价格也很实惠。随着激光雷达的普及,其成本陡降,从约 50,000 美元降至 10,000 美元以下。由于集成度更高,系统尺寸和成本得以降低,雷达在现代汽车中的主流应用已成为可能。几年以前,机械扫描激光雷达系统体积庞大,通常安装在各种自动驾驶出租车上;随着这些年技术的进步,激光雷达变得不再臃肿。向固态激光雷达的转变将进一步缩减系统尺寸和降低成本。
激光雷达类型
现有的激光雷达系统种类多样,本文将重点介绍其中的窄脉冲 ToF测量方法。激光雷达系统中有两种波束控制类型:
机械式激光雷达利用高级的光学器件和旋转部件,提供宽(通常是 360 度)FOV。其机械特性可在宽 FOV 范围内提供高信噪比 (SNR),但会造成尺寸偏大(尽管尺寸已经有所缩减)。
固态激光雷达没有旋转机械组件,且 FOV 偏小,因此成本较低。通过位于汽车前后和侧面的多个通道以及融合多通道数据,可产生优于机械式激光雷达的 FOV。
固态激光雷达具有多种实现方式,包括:
微机电系统 (MEMS) 激光雷达:MEMS 激光雷达系统利用倾斜角随激励(如电压)不同而变化的微镜。实际上,MEMS 利用机电等效件替代了机械扫描硬件。用于确定接收 SNR 的 MEMS 接收器收光孔径通常很小(毫米级)。要在多个维度移动激光束,需要级联多个微镜。这一校准过程非常重要,而且安装后易受车辆行驶中冲击和振动的影响。MEMS 系统的另一个隐患是,让 MEMS 器件承受低至 -40°C 的温度很具挑战性。
闪光激光雷达:闪光激光雷达的工作原理与使用光学闪存的标准数字摄像头非常相似。在闪光激光雷达中,一个大面积激光脉冲照射前方环境,而与其靠近的焦平面阵列光电探测器收集反向反射光。探测器采集图像距离、位置和反射强度。与机械激光扫描法相比,这种方法能采集单个图像中的整个场景,因此,数据采集率更快。除此之外,由于单次闪光可捕获整个图像,这种方法不会受振动影响而损坏图像。其不足之处在于实际环境中反光体的存在。反光体会反射大部分光信号,而反向反射很少,会对整个传感器产生盲区,可用性降低。这种方法的另一个缺点是,要照射整个场景和确保视野足够远,需要很高的峰值激光功率。为了符合眼部安全要求,激光雷达主要用于中短距离检测系统。
光学相控阵 (OPA):OPA 工作原理与相控阵雷达类似。在OPA 系统中,光学相位调制器控制光穿过透镜的速度。控制光速能实现对光波阵面形状的控制,如图 2 所示。顶部光束未发生延迟,而中间和底部光束延迟量递增。该现象有效地“控制”激光光束指向不同方向。类似方法也可用于控制朝向传感器的反向散射光,因此无需使用机械运动部件。
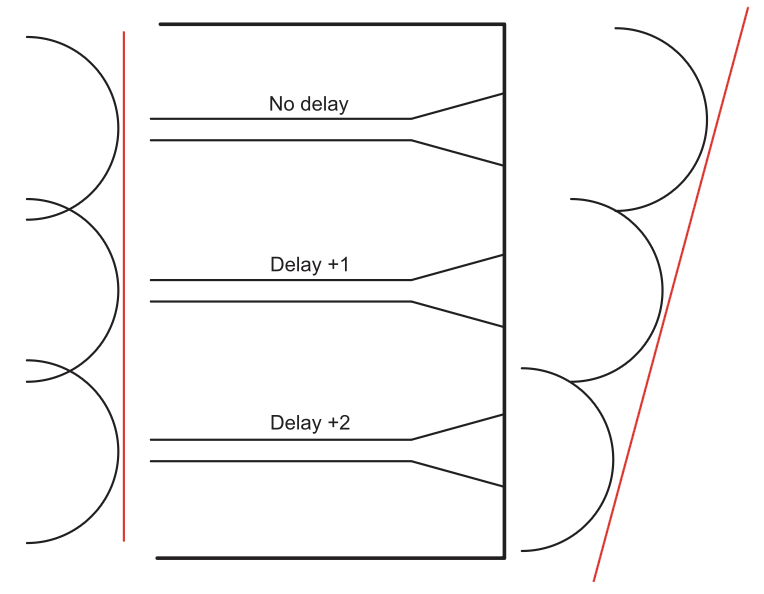
图 2:一个 OPA
调频连续波 (FMCW) 激光雷达:虽然上述方法以使用窄光脉冲的 ToF 原理为基础,但 FMCW 利用相干方法产生调频激光的简单线性调频脉冲。通过测量返回线性调频脉冲的相位和频率,系统能依据多普勒原理测量出距离和速率。尽管生成线性调频脉冲增加了难度,但 FMCW 方法简化了负载和光学器件的计算过程。FMCW 系统所需的激光功率远低于脉冲 ToF 系统所需的激光功率,因而 FMCW 适用于远距离检测应用,在雾天、雨雪等恶劣天气条件下也表现良好。
激光雷达子系统
图 3 展示了激光雷达的完整功能模块子系统,包括信号链、电源、接口、时钟和监控/诊断子系统。激光雷达信号链的主要子系统包括发射系统 (Tx)、接收系统 (Rx)和提取点云信息的自定义数字处理系统。TI 提供适用于青色显示功能块的器件。
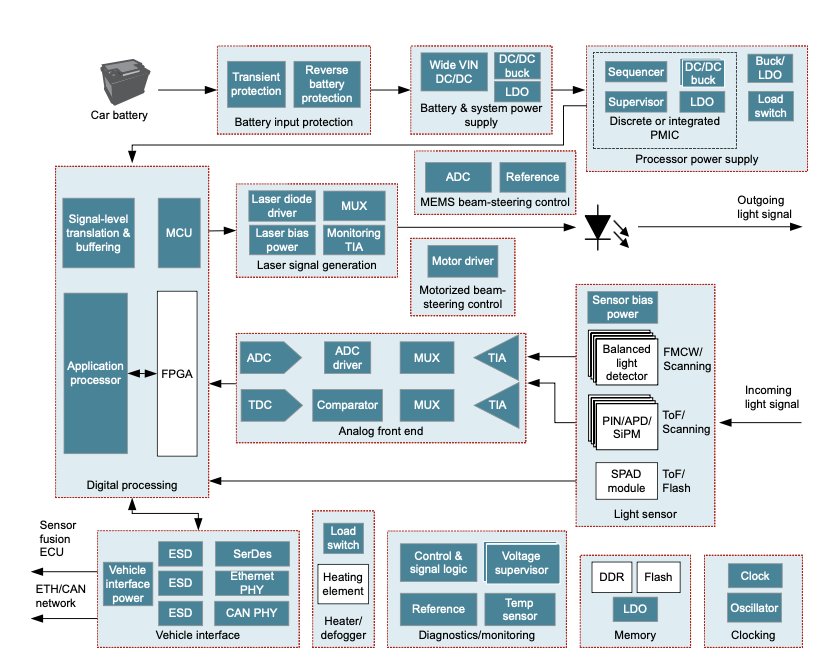
图 3:激光雷达模块包括信号链、电源、接口、时钟监控或诊断子系统
激光雷达系统集成
对于需要通过进一步集成实现高密度的系统,TI 为 Tx 路径提供激光驱动器,并提供放大器来处理 Rx 路径中从光电探测器直接到模数转换器 (ADC) 或时数转换器 (TDC) 的连接。LMG1025是一款分立式激光驱动器,可驱动能够产生 1.25nS 脉冲的外部氮化镓场效应晶体管 (FET)。TI 的集成式LMH13000激光驱动器无需外部 FET,可利用高达5A 的 50mA 可调电流驱动激光,产生 <1ns 的脉冲。此外,LMH13000?的尺寸大约是分立式激光驱动器解决方案的四分之一。并联使用多个 LMH13000 器件可增加进入激光器的电流量。
TI 的接收路径放大器包括适用于基于 ADC 的系统的LMH32401和LMH32404,以及适用于基于 TDC 的系统的LMH34400。这些器件集成了高速互阻抗放大器 (TIA)补偿网络,并具有环境光消除、输入过流钳位保护和多路复用器模式等特性,因此非常适合激光雷达应用。
环境光消除电路通过消除直流环境光信号来更好地检测输入电流,并且可以取代光电二极管和放大器之间的交流耦合,因而可节省布板空间。当放大器检测到其节点进入饱和状态时,输入过流保护钳位会吸收多余的电流并将多余的电流转移到正电源,从而使放大器更快地恢复到线性状态并将脉冲扩展限制在几纳秒以内。集成式激光雷达 TIA 具有集成的输出开关,允许将多个光电二极管和放大器通道连接到更少的 ADC 和 TDC 通道,因此无需使用分立式多路复用器。这样便可以使用多个传感器,同时节省通常由多个 ADC 和 TDC 通道占用的布板空间。
结语
全球的自动驾驶汽车商业化即将踏上激动人心的征程,驱动这一领域发展的技术和架构也在不断变化。激光雷达才在业内崭露头角,但这项技术凭借自身的优势正在快速创新。与较为成熟的传感器系统相比,激光雷达拥有更高的性能、更紧凑的体积,同时成本也与之相当。
-
传感器
+关注
关注
2571文章
53471浏览量
772130 -
激光雷达
+关注
关注
975文章
4269浏览量
193625 -
自动驾驶
+关注
关注
790文章
14445浏览量
172030
原文标题:技术干货 | 汽车激光雷达简介
文章出处:【微信号:tisemi,微信公众号:德州仪器】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
激光雷达,为何在“嫌弃”中被“追捧”?





 工商网监
工商网监
评论