 都是点云数据,毫米波雷达能否替代激光雷达?
都是点云数据,毫米波雷达能否替代激光雷达?

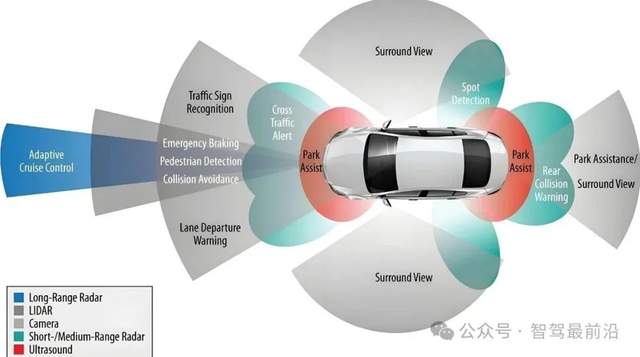
图 各种传感器搭配达成最佳智驾,就是有点费钱

原理差异
[首发于智驾最前沿微信公众号]点云不是激光雷达独有的。所谓点云,就是用一堆点来表述的数据,每个点的基本盘是xyz三坐标(有一种点云格式就叫.xyz),在附带一些信息,比如强度,比如速度等等。
任何传感器用一堆点来表示探测到的数据,都可以是点云,比如毫米波雷达也是点云。
图 笔者机器上的点云可视化
毫米波雷达:通过发射毫米波(波长 1-10 毫米),利用电磁波反射特性探测目标,通过多普勒效应获取速度信息,点云由反射信号的空间位置计算生成。波长越短的电磁波越“硬”,越容易弹回来;波长越长越“软”,容易穿透过去。
这也是建国初期斯大林要在中国建设长波电台,伟人没有同意。长波电台就是联系水下潜艇的,波长越长穿透力越强,穿过海水。所以毫米波雷达对一些非金属的软物体(比如塑料布)会穿过去没有回波,导致漏检。
特别的,毫米波雷达单独一帧的每个点是有速度的,因为多普勒效应;但是激光雷达单帧点云的每个点只有距离没有速度,因为靠激光反射时间测距,激光波长太短了,无法利用多普勒效应。
激光雷达(LiDAR)发射激光束(波长通常在 600-1600 纳米,比毫米波短多了),通过测量光束往返时间(TOF)计算距离,点云由激光点的三维坐标构成。
其实光也是电磁波,只不过波长超短,频率超高(电磁波和光都是光速),直观说也就特别硬,碰见什么都会反弹,不管是金属还是非金属。当然,这个特点也导致激光雷达特别容易被干扰,雨雾天气,空气中的小水滴和沙尘也会让激光反弹回去。
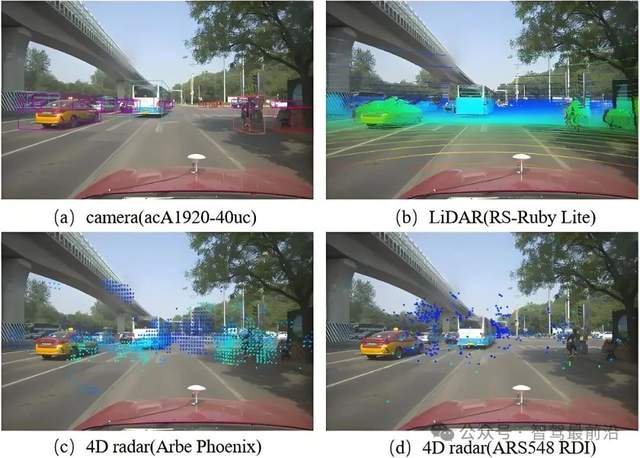
图 激光雷达和毫米波雷达探测效果对比,来自网络

点云特点对比
1.点云密度与分辨率
毫米波雷达:
点云密度低,通常每帧只有几十到几百个点(取决于雷达通道数)。
横向 / 纵向分辨率较差,远处目标易出现 “点云稀疏” 甚至丢失,难以区分细节(如车辆轮廓、行人肢体)。
例:128 通道毫米波雷达对 100 米外的车辆,可能仅生成 5-10 个点。
激光雷达:
点云密度高,高分辨率 LiDAR(如 192 线)每帧可生成数百万个点。
能清晰刻画目标轮廓(如车辆的边角、行人的四肢)。
例:192 线 LiDAR 对 100 米外的车辆,可生成数百个点,足以还原其形状。
2.空间精度
毫米波雷达:
距离精度较低,通常在 1 米左右(远距离误差更大)。
角度分辨率差(一般几度到十几度),近距离易出现“点云重叠”(如并排车辆的点云混在一起)。
激光雷达:
距离精度可达厘米级(如±2cm),角度分辨率可至 0.1 度以下。
能精确区分相邻目标(如两车相距 1 米时,点云边界清晰)。
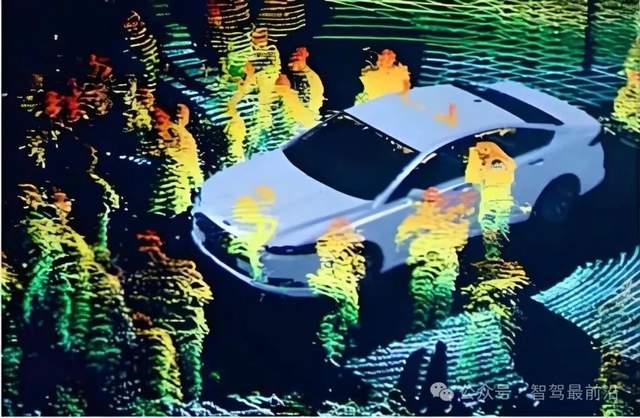
图 车展现场,Lidar点云清晰识别观众轮廓,来自网络
3.环境适应性
毫米波雷达:
抗干扰能力强,不受雨、雪、雾、强光(如逆光)影响,夜间性能稳定。
对非金属目标(如塑料、布料)反射较弱,可能漏检。
激光雷达:
雨、雪、雾会散射激光,导致点云噪声增加,远距离探测能力下降(如大雾天有效距离从 200 米降至 50 米)。
强光(如正午阳光)可能干扰接收端,造成部分点云丢失。
对大多数物体(包括非金属)反射稳定,漏检率低。
4.点云属性
毫米波雷达:
点云除了三维坐标(x,y,z),还包含速度信息(通过多普勒效应直接测量,精度高)。
无颜色、反射强度等细节信息,反射强度仅能粗略区分金属 / 非金属。
激光雷达:
点云包含三维坐标、反射强度(可用于区分路面、车辆、行人等不同材质)。
部分 LiDAR(如多线彩色 LiDAR)可输出颜色信息(结合摄像头)。
速度信息需通过多帧点云计算(如光流法),精度低于毫米波雷达。
5.数据量与成本
毫米波雷达:
点云数据量小(每帧 KB 级),对处理器算力要求低。
成本低(车规级雷达约几十到几百美元),适合大规模量产。
激光雷达:
点云数据量大(每帧 MB 级,192 线 LiDAR 每小时可产生数十 GB 数据),需高性能处理器处理。
成本高(车规级高分辨率 LiDAR 曾达数万美元,目前降至几千美元,但仍高于毫米波雷达)。
二者点云特点决定了二者典型应用场景差异。
毫米波雷达适合对环境鲁棒性要求高、需快速获取速度信息的场景,如:
自适应巡航(ACC):测量前车距离和速度。
自动紧急制动(AEB):恶劣天气下检测前方障碍物。
激光雷达适合需要高精度三维建模、目标识别的场景,如:
自动驾驶高清地图构建:还原道路细节(车道线、护栏)。
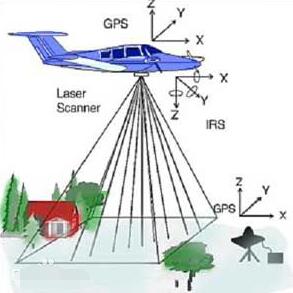
城市级三维扫描:生成精细的建筑、地形模型。所以很多激光雷达的学术数据集是遥测方面的。
详细总结表格如下:
| 维度 | 毫米波雷达点云 | 激光雷达点云 |
| 点云密度 | 低(几十 - 几百点 / 帧) | 高(数万 - 数百万点 / 帧) |
| 空间精度 | 米级距离,几度角度分辨率 | 厘米级距离,0.1 度以下角度分辨率 |
| 环境适应性 | 抗雨雾、强光,夜间稳定 | 受雨雾、强光影响,远距离性能下降 |
| 关键属性 | 包含速度信息,反射强度粗略 | 包含反射强度(部分含颜色),速度需计算 |
| 数据量与成本 | 数据量小,成本低 | 数据量大,成本高 |
| 典型应用 | 车辆测速、恶劣天气避障 | 高精度建模、自动驾驶环境感知 |

成本、探测距离和处理算力需求的对比
核心参数对比如下
| 指标 | 毫米波雷达 | 激光雷达 |
| 单件成本 | 约50-200美元 | 1000-5000美元 |
| 探测距离 | 最远350米+(4D毫米波) | 通常200-300米 |
| 距离分辨率 | 4cm(77GHz) | <3cm |
| 角度分辨率 | 1度(4D毫米波) | 0.1-0.2度 |
| 算力需求 | 低(可直接输出结构化数据) | 高(需点云处理) |
| 恶劣天气适应性 | 强(雨雾穿透性好) | 较差(易受干扰) |
1、成本差异
毫米波雷达成本仅为激光雷达的1/10-1/5,主要因激光雷达需精密光学部件(如905/1550nm激光器、旋转镜组);
4D毫米波雷达虽比传统毫米波贵,但仍显著低于激光雷达 。
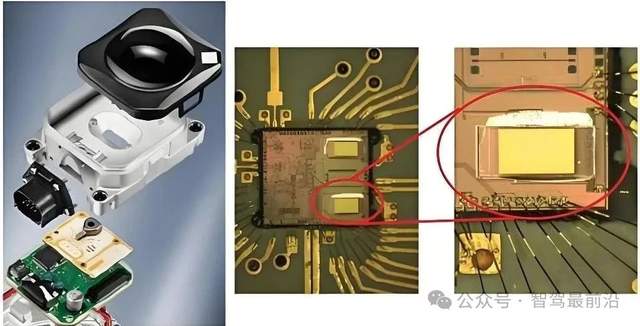


图 激光雷达的高精度光学器件,来自网络
2、探测性能
距离:毫米波在远距探测(>300米)占优,尤其适用于高速公路场景;
精度:激光雷达在三维建模(如识别路缘石、小物体)上更精准,分辨率可达毫米级。
3、算力需求
激光雷达产生的点云数据需GPU/NPU进行实时处理,算力消耗大(典型需求>20TOPS);
毫米波雷达输出可直接用于决策,适合算力受限的入门级智驾系统。
顺便说一句,4D毫米波的4D,第四个维度是高度。

总结
首先,毫米波雷达绝不可能取代激光雷达,一句话原因,精度太差。
在毫米波雷达看来,站立不动的路人和路上的锥形桶是一回事儿。这里强调站立不动是因为毫米波可以用多普勒效应检测点的速度,说以走路的人和锥形桶还是可以区分开的。

图 激光雷达和毫米波雷达和摄像头对比,来自网络
其次,二者的第一性原理的区别在介质的波长。它们的介质本质都是电磁波(光也是电磁波),唯一区别是波长。
在一些量子力学书籍里面,解释光的波粒二象性,用了一个很好的概念,“波包”,一组波包络在一个小范围内,就像一个粒子。波包的解释光的波粒二象性,不敢说完美,但是比我们上学时候学的辩证法(同时又是驴又是马)解释还是强多了。
图 波包,来自网络
毫米波的波长长,波包软,射程远,穿透性强,但精度不高,有点像在丢沙包。
激光雷达的波长短,波包硬,射程有限,反射性强,精度高,有点像在丢小石子。
至于未来有没有介于它们之间的介质,那就要看基础研究的突破了。
审核编辑 黄宇
-
传感器
+关注
关注
2567文章
53265浏览量
769947 -
激光雷达
+关注
关注
973文章
4251浏览量
193339
发布评论请先 登录





 工商网监
工商网监
评论