 使用位置传感器进行无刷电机控制
使用位置传感器进行无刷电机控制

引言
当前,电机设计正朝着“无位置传感器”的方向发展。 那么,电机中是否还需要位置传感器呢?这个问题的完整答案相当复杂,但总体而言,位置传感器仍将长期存在。在电动工具等应用中,采用无传感器设计的方波驱动无刷直流电机或场定向控制 (FOC) 无刷交流电机,确实可以实现无需任何旋转角度传感器即可工作。但实际情况是,工业和人形机器人、自主移动机器人和直线电机运输系统等终端设备,旋转角度传感器或线性位置传感器依然是不可或缺的关键组件。
使用位置传感器进行无刷电机控制
位置传感器不仅用于无刷直流电机或无刷交流电机的定子电流换向,还用于速度和位置控制。工业多轴机器人通常在电机轴和机器人轴之间装有一个齿轮。与电机轴耦合的旋转角度传感器不仅需要检测转子角度,还需要计算电机轴的转数,从而控制相应机器人轴的等效绝对角度位置。编码器类型因具体应用而异。
增量和绝对编码器
增量编码器通常使用 ABZ 数字或模拟单向接口,其中两个正交编码的数字脉冲序列信号(A 和 B)或两个模拟正弦/余弦信号(A 和 B)可实现低延迟相对角度测量,分辨率从约 10 位到最高 28 位不等。可选索引(Z 或 I)可提供绝对机械角度信息。增量编码器不会在启动时提供绝对角度,而需要在索引出现之前旋转最多一周。因此,这些编码器非常适合需要极低延迟 (<1?s) 但不需要在启动时获得绝对角度的变速应用。
相反,单转或多转绝对旋转编码器在启动时可提供绝对角度位置。它们配备双向 RS-485 接口,支持特定于供应商的协议,还可实现时间触发角度测量并提供旋转速度和旋转圈数等信息。角度分辨率通常从 10 位到 >30 位不等,延迟低至 10?s,可满足各种工业应用。位置分辨率通常取决于通过数字接口传输的数据格式。例如,采用 20 位整数格式的角度分辨率为 360/220;0h = 0 度、0xFFFFF = 360 度 - 360/220。系统整体噪声明显高于量化噪声;该效应由有效位数 (ENOB) 表征。
方程式 1 通过角度的标准偏差(以度为单位测得)计算角度的 ENOB:

方程式 1
角度噪声信号的均方根等于标准偏差 (1 σ)。图 1 展示了角度精度;相关角度误差大于标准偏差。角度精度不仅取决于通常采用 6 σ 值的峰值噪声,还取决于单转范围内的非线性度。
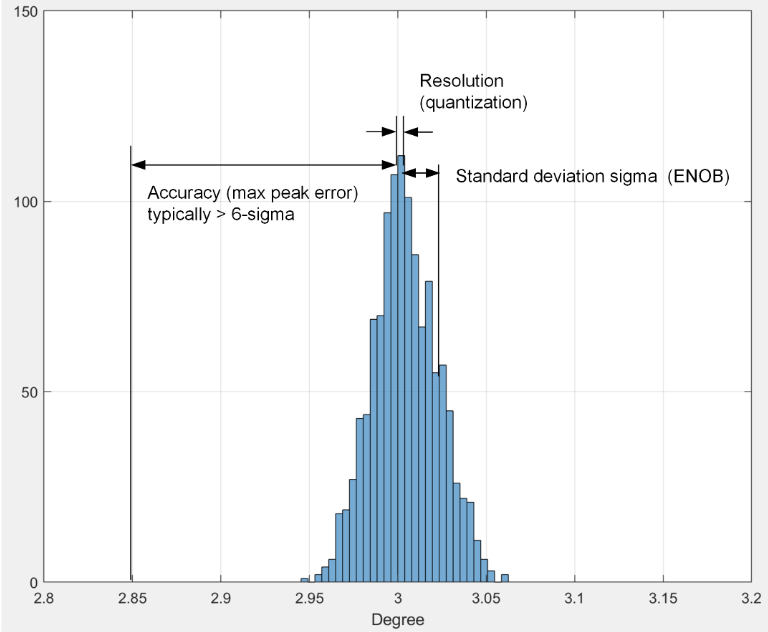
图 1:静态角度分布
编码器的 FOC 电机控制技术和要求
图 2 中显示的FOC 方法是一种高性能技术,可根据转子磁通角控制生成的定子电流矢量,从而通过永磁同步电机最大限度地增加转矩。FOC可提供平滑的转矩以及从静止到高速运行的快速瞬态响应。精确、低延迟的转子磁场角度测量会将三个定子相电流(iU、iV和 iW)分解至转子磁场定向坐标系中,其中 iq为转矩生成电流、id为弱磁电流。
在人形机器人等终端设备中,绝对旋转角度的测量精度通常为 1 度至 0.1 度,ENOB 为 12 位至 15 位,采样率为 8kHz 至 32kHz。旋转角度与电机相电流同时检测。低于 20?s 的低延迟角度测量为微控制器 (MCU)提供了足够的时间来运行控制算法和在下一个 PWM 周期更新脉宽调制器 (PWM)。
不同于旋转电机,基于直线电机的运输系统需要绝对线性位置检测,但仍然应用FOC来获得最大转矩。12 位位置分辨率(延迟低于 100?s)通常足够。
此外,要在工业机械中实现国际电工委员会 62061 或国际标准化组织 (ISO) 13849 等标准规定的功能安全,需要根据安全完整性等级或性能等级确定经安全认证的编码器,并使用位置传感器进行额外诊断,从而检测随机硬件故障。在汽车应用中,根据 ISO 26262 标准设计的系统会在系统启动期间运行诊断,而工业系统通常全天候运行,因此需要在正常运行期间进行持续诊断。
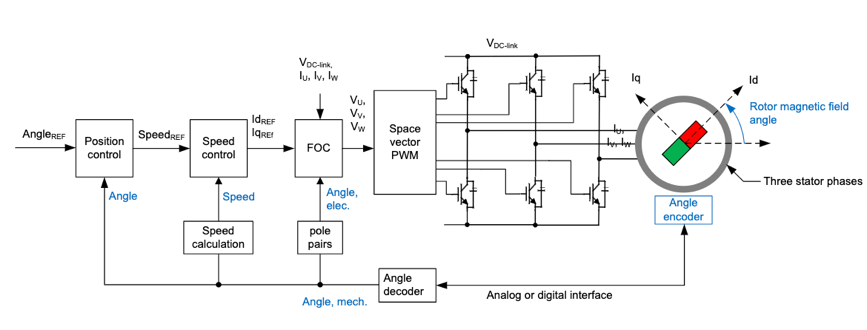
图 2:级联位置、速度和 FOC
位置传感器技术
主要类型的位置传感器包括光学传感器、磁传感器、电感式传感器或电容式传感器。光学传感器通常可提供最高分辨率(但磁传感器和电感式传感器更可靠),并且可以降低系统总成本。在工业或汽车系统中,附近线路中存在大电流流动,这就要求使用不受杂散磁场影响的传感器技术(例如电感式)。电容式传感器的分辨率通常低于电感式传感器和磁传感器,而且电容式传感器并不常见。
对于恶劣环境(例如电机集成导致的高温)中的成本敏感型系统,TI 提供磁性和电感式位置传感器。
磁性位置传感器
磁编码器提供了一种经济高效的方法,可用于检测旋转或线性运动,同时在含有灰尘、油和水的恶劣环境中保持抗扰性。磁性位置传感器可检测磁场变化,将磁场变化转换为电信号并生成输出信号。磁性位置传感器技术种类繁多,包括霍尔效应、AMR、隧穿磁阻 (TMR) 和巨磁阻 (GMR)。表 1 列出了每种传感器的优缺点。

表 1:磁传感器技术比较:主要特性和规格
(1) 增益和偏移校准后
(2) 增益、偏移和正交性校准后
采用 3D 霍尔效应线性传感器的线性位置示例
在有效载荷载体以 5m/s 至 15m/s 的速度快速移动的直线电机运输系统中,12 位位置分辨率(延迟低于 100?s 且采样率 ≤8kHz)通常足够,而多个位置传感器通过高速串行外设接口 (SPI) 总线连接到单个 MCU,如图 3 中所示。
TMAG5170 3D 霍尔效应传感器具有三个主要优势:高精度、低延迟和电路板灵活放置。全温度范围内的灵敏度误差漂移小于 2.8%。10MHz SPI 可实现低延迟。此外,板载 3D 感应元件支持可配置的 XY、YZ 或 XZ 感应方向,从而提高相对于磁体放置传感器时的灵活性。
具有四通道 3D 霍尔效应传感器的低延迟精确线性位置检测参考设计采用以 25mm 间隔放置的 TMAG5170,以实现精确的低延迟线性位置检测。C2000 MCU以 ≥ 8kHz 的采样率从全部四个TMAG5170传感器读取磁场 Z 和 X 的数据,并计算移动磁体的位置,误差小于 0.15mm、延迟低于 57.5?s。
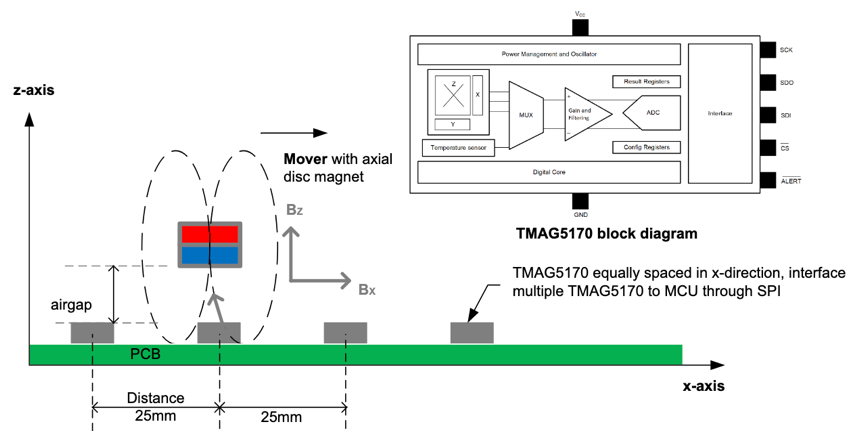
图 3:直线电机运输系统中的 TMAG5170
采用 AMR 传感器的旋转角度示例
AMR 传感器包含四个磁阻惠斯通电桥,其中两个电桥的输出端子的电压差将反映外部磁场强度。
与霍尔效应传感器相比,AMR 传感器具有更高的工作频率和更高的信噪比 (SNR)。与 GMR 和 TMR 传感器相比,AMR 传感器的正交误差相对可以忽略不计。在需要高精度编码器的伺服驱动器等应用中,AMR 传感器通常更适合,因为它们具有更高的磁场耐受度,可实现更强的整体抗扰性。
TMAG6180-Q1 2D AMR 角度传感器可测量磁场,并产生两个与这些磁场成正比的差分(或单端)电压输出。TMAG6180-Q1的延迟低于 2?s,还可以更大限度地降低高速运动引起的角度误差。集成的霍尔效应开关可产生两个数字象限输出(Q0 和 Q1),从而将角度检测范围扩展到 360 度。结合正弦和余弦波形,Q0 和 Q1 数字输出足以确定绝对旋转角度。图 4 是 TMAG6180-Q1 的功能方框图,图 5 则显示了输出波形。
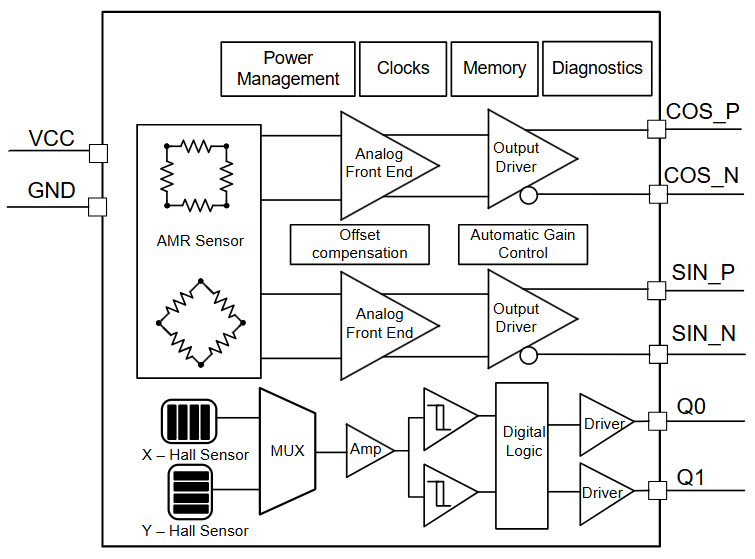
图 4:TMAG6180-Q1 方框图
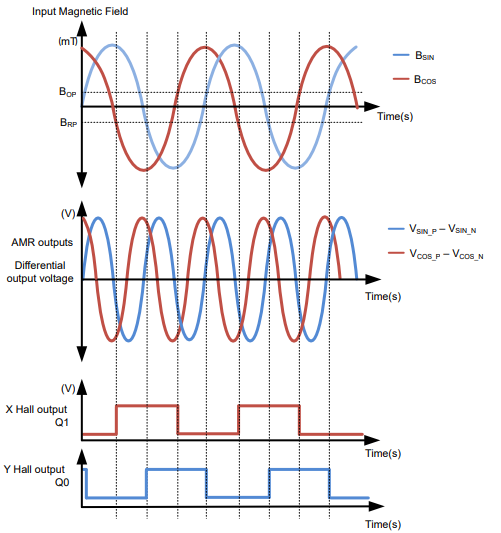
图 5:TMAG6180-Q1 输出波形
为了获得更高的精度,MCU 应集成一个高速、高 ENOB 的模数转换器,应能够运行有限脉冲响应滤波器等数字滤波器来消除信号链噪声,并应具有额外的补偿算法来消除机械容差及信号链增益和偏移不匹配造成的误差。采用 AMR 传感器的高分辨率低延迟紧凑型绝对角度编码器参考设计是一种小尺寸(直径为 3cm)参考设计,采用TMAG6180-Q1和MSPM0G3507 MCU,集成双 12 位 ADC(支持高达 128 倍的过采样)并配备一个数学加速器,有助于提高效率并降低系统成本。该系统可用于角度测量,SNR 达 94.7dB(相当于 15.4 ENOB)且角度误差低于 0.05°,如图 6 所示。
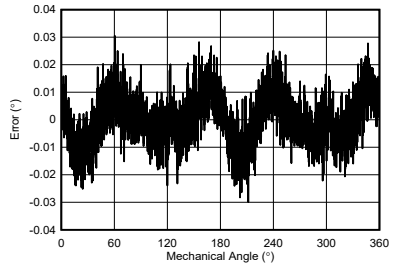
图 6:偏移校准后 25°C 温度下单转范围内的角度误差
电感式位置检测
与磁传感器相比,电感式角度传感器具有多项优势。它们的主要优势是对外部直流电场具有固有的磁场抗扰性。此外,在电感技术中,只需要将一个导电金属靶标(无需磁体)靠近感应线圈,即可确定金属靶标围绕电机轴旋转时的位置。
图 7 显示了使用两个LDC5072-Q1电感式传感器(每个感应线圈一个)的绝对编码器。游标编码需要使用两个感应线圈:外部传感器靶标可以有 16 个金属位置;内部靶标可以有 15 个金属位置。等间距排布两个靶标,这样可在整个旋转过程中强制形成独特模式,从而能够以较高的精度获得绝对角度。
机械旋转变压器的功能与绝对电感式编码器相同,但尺寸和重量等方面存在不足。电感式编码解决方案可直接构建在印刷电路板上,而旋转变压器则构建在具有铜线绕组齿槽的厚钢叠层上。旋转变压器的机械结构也导致其构建成本昂贵。最后,功耗问题也尤为突出:旋转变压器极易消耗 500mW 的功率(假设 7VRMS下 70mA 电流)。
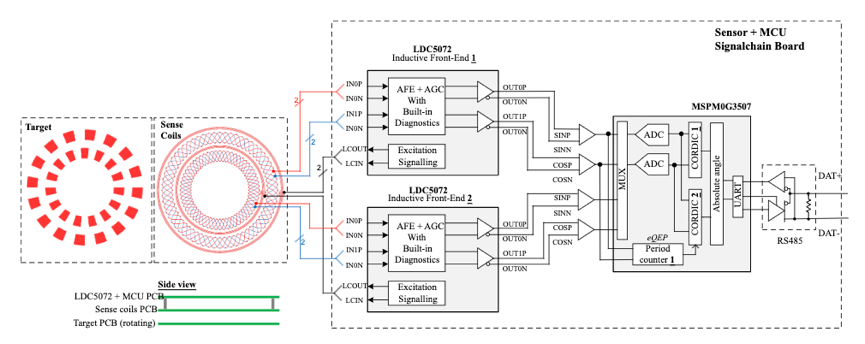
图 7:使用 LDC5072-Q1 的绝对编码器
结语
如何选择最合适的位置传感器取决于电机驱动系统的要求,其中成本、性能、工作温度和尺寸均是最重要权衡因素。另一方面,还需考虑是否在工业或汽车解决方案中添加额外的诊断或功能安全设计。每种电机和编码器类型都有各自的要求,因此必须选择最适合应用的传感器类型。
-
机器人
+关注
关注
213文章
29865浏览量
214112 -
电机控制
+关注
关注
3575文章
1985浏览量
272388 -
编码器
+关注
关注
45文章
3830浏览量
138559 -
德州仪器
+关注
关注
123文章
1806浏览量
142605 -
位置传感器
+关注
关注
3文章
284浏览量
28200
原文标题:技术干货 | 如何选择电机控制中的位置传感器?
文章出处:【微信号:tisemi,微信公众号:德州仪器】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
无位置传感器直流无刷电机的退磁控制
位置传感器与直流无刷电机有什么关系
基于FPGA的无位置传感器无刷电机控制器
为什么说BLDC无刷电机采用无位置传感器更具优势?
阐述直流无刷电机无位置传感器控制的发展
无刷电机位置传感器的作用及其布局方面的注意事项





 工商网监
工商网监
评论