 ADI ADMT4000磁性位置传感器助力人形机器人关节设计
ADI ADMT4000磁性位置传感器助力人形机器人关节设计

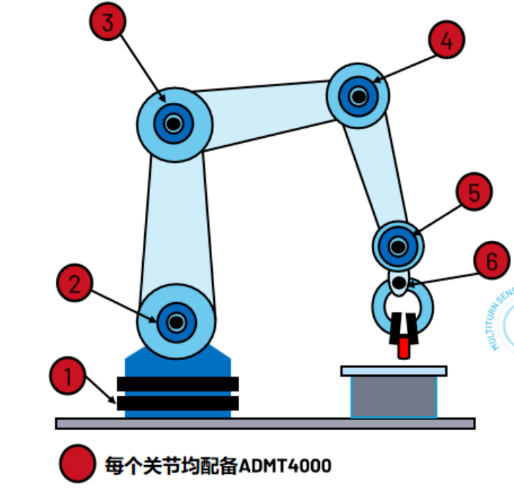
人形机器人作为集成了机械制造、控制技术与人工智能等多学科的复杂系统,其运动控制的精确性与可靠性是衡量其性能的核心指标。其中,关节的绝对位置感知,特别是在意外断电重启后的位置信息恢复能力,是系统设计中一个关键的技术挑战。本文将介绍ADI的ADMT4000磁性位置传感器,并阐述其如何通过无源多圈检测技术,为人形机器人关节设计提供一个高集成度、高可靠性的解决方案。
多圈位置记忆挑战,传统方案的技术瓶颈
当今市场上角度传感器种类较多,有磁式、光学式、电感式、旋变器式等传感器。霍尔传感器基于磁效应、XMR系列传感器有AMR、GMR和TMR传感器,他们通常对磁场方向的变化很敏感。但遗憾的是,所有这些传感器的绝对测量范围都只有单圈,即360度,AMR传感器是个例外,它的信号以180度为周期进行重复,绝对测量范围是半圈,即180度。
若想要进行超过一圈的绝对测量,非接触式是当前可行的实现方法。传统实现断电后位置记忆的多圈检测主要依赖以下几种方案,但它们各自存在着固有的局限性。
多圈编码器传统解决方案(非接触式)
- 机械式方案
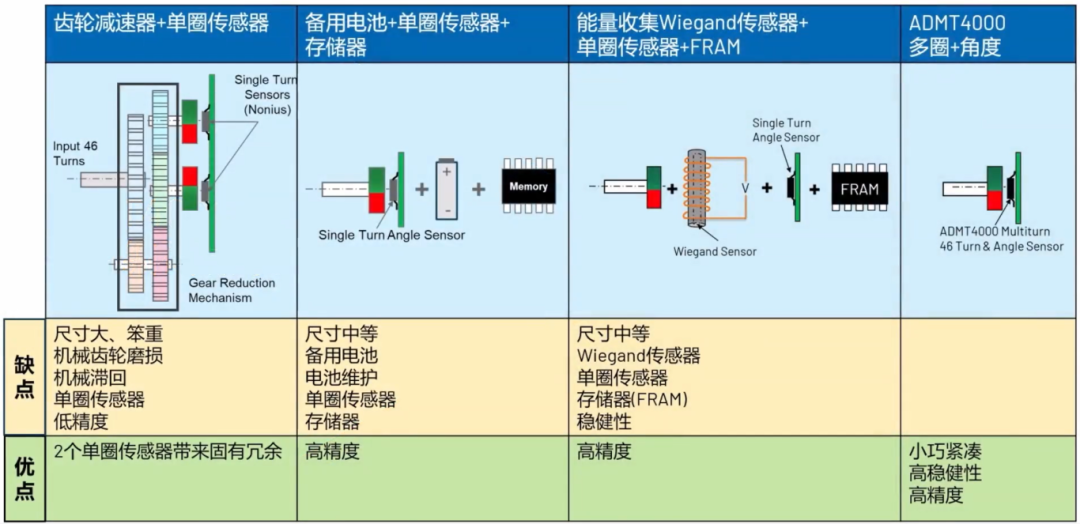
该方案通常采用“齿轮组+单圈绝对值编码器”的结构,通过精密齿轮的传动比来换算圈数,其主要缺陷在于齿轮机构存在机械磨损与背隙,长期运行后会影响传动精度;多级齿轮结构复杂,体积和重量较大,与人形机器人关节追求轻量化、紧凑化的设计目标相悖。
- 带备用电源的电子方案
此方案通过为单圈传感器和存储器(如FRAM)配备备用电池,以在主电源中断时维持位置数据的记录。该方案的主要问题在于引入了电池管理,包括电池的生命周期、定期维护与更换,这增加了系统的复杂性和长期拥有成本,并降低了整体可靠性。
- 基于韦根(Wiegand)效应的方案
韦根传感器利用导线的自发电效应,可在旋转时产生能量脉冲以驱动计数和数据存储。尽管此方案无需电池,但在某些工况下,尤其是在圈数累积较多或转速变化剧烈时,存在发生圈数计数错误的风险(即“丢圈”现象),这对于要求高可靠性的机器人应用是不可接受的。
创新型多圈传感器ADMT4000技术解析
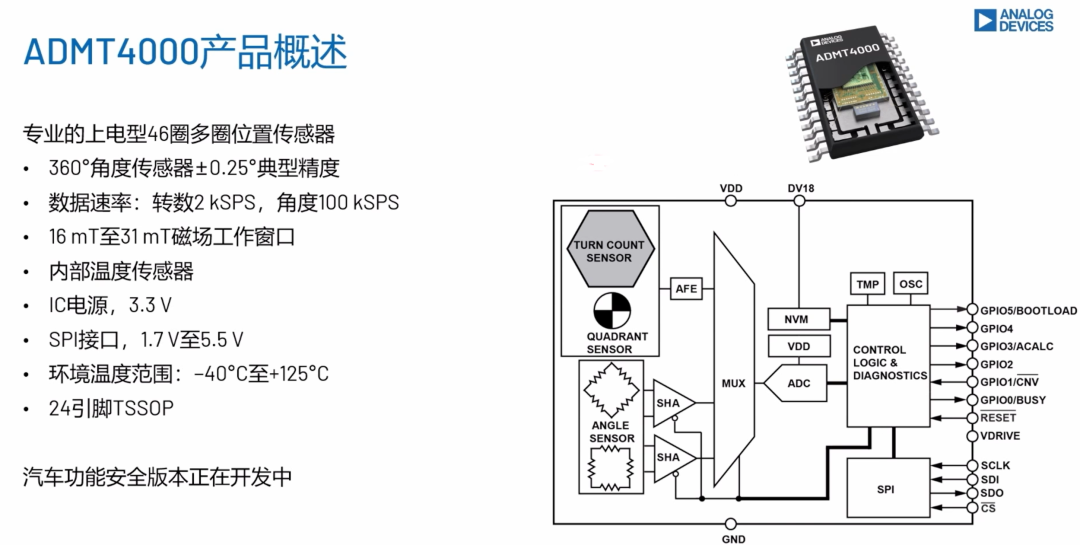
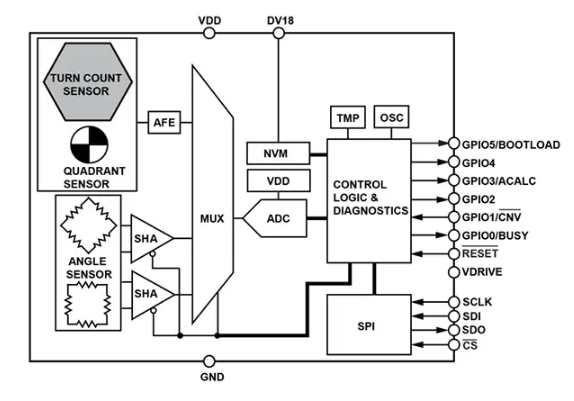
ADMT4000是ADI公司率先发布的单芯片多圈位置传感器,旨在从根本上克服上述传统方案的不足。其绝对测量范围为46圈,整个测量范围内达到±0.25度的精度,借助于这种新的多圈技术,省去了与单圈传感器结合使用的备用电池或机械齿轮,也可以免去线性执行器中的线性传感器。此外,对于未采用传统笨重机械多圈编码器的系统,这种传感器无需在上电时重新归位或重新校准,能够在完全无源(无供电)的状态下,精确记录多圈旋转运动。
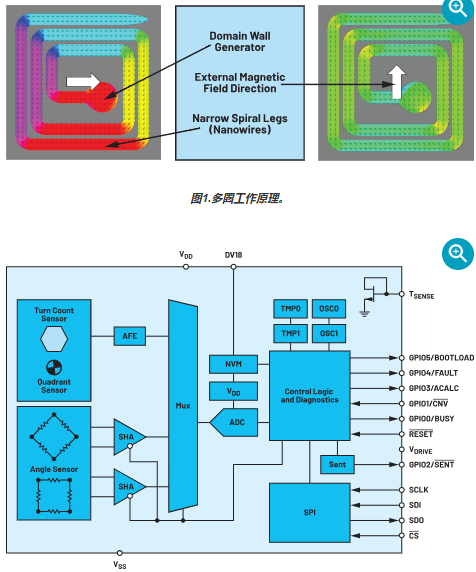
ADMT4000的技术实现基础是磁畴壁在磁性纳米导线中的可控传播。在磁性材料中,磁畴是原子磁矩取向一致的区域,而磁畴壁是相邻磁畴之间的过渡层。该传感器利用外部永磁体(固定于机器人关节的旋转部分)产生的磁场,来驱动内部磁性导线中的磁畴壁发生位移。因此,关节的旋转运动被直接、无损地转换为磁畴壁在一维线性路径上的位移。
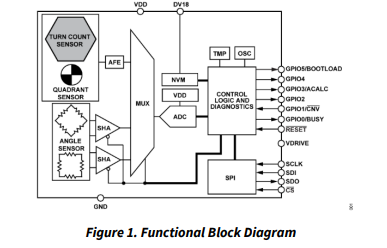
为了读取磁畴壁的位置,ADMT4000沿磁性导线集成了四个巨磁阻(GMR)检测点。GMR效应是一种量子力学效应,其电阻值会随局部磁场方向的变化而发生显著改变。当磁畴壁扫过这些GMR检测点时,会引起它们各自电阻值的变化。通过精确测量这四个检测点的电阻值,可以得到一个与磁畴壁位置唯一对应的阻抗特征。系统控制器通过读取这组电阻值,即可精确计算出磁畴壁的当前位置,从而反演出关节的绝对旋转角度和累计圈数。
关键在于,磁畴壁的位置是一种稳定的物理状态,其维持无需任何外部能量供给。这意味着,即使在系统断电期间关节发生了运动,该位置信息也被物理性地保留在芯片内部。当系统重新上电时,只需进行一次电阻读取,即可立即获知当前精确的绝对位置。
使用此款传感器需要在16~31mT的磁场窗口内操作,若没有足够的磁能,或磁场强度低于16mT,则会面临磁能不足的风险,无法将磁畴移出畴壁发生器并穿过螺旋。如果磁场强度超过 31mT,尤其是显著超过31mT的话,则会有额外磁畴加入螺旋中以致产生错误计数信息的风险,或者非常强的磁场会导致螺旋完全复位。
此外,作为一款磁性传感器,ADMT4000在应用中需考虑对外部杂散磁场的抗干扰能力。在人形机器人这类电磁环境复杂的应用中,建议采用磁屏蔽措施。ADI提供相应的屏蔽方案参考设计,通过在芯片周围或PCB板上设计屏蔽层,可以有效抑制外部磁场干扰,确保传感器测量的准确性。
从机器人到工业与汽车,ADMT4000开启新应用大门
除了在人形机器人关节中的核心应用,ADMT4000凭借其无源、多圈、高可靠性的特点,在其他多个领域也展现出巨大的应用潜力。
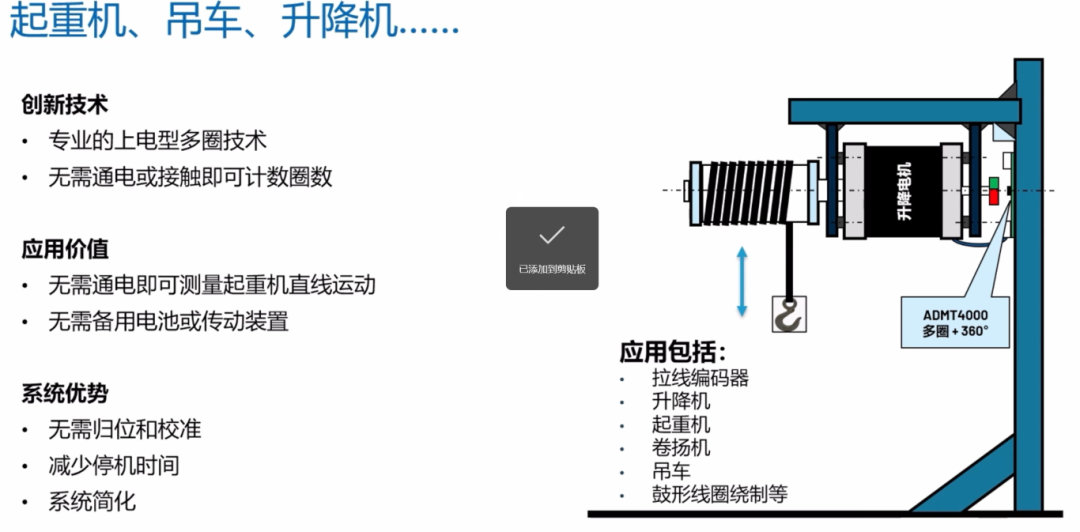
在广义的工业自动化中,ADMT4000可用于各类旋转执行器和线性执行器中。例如,在多轴协作机器人的关节、数控机床的XY工作平台中,断电后位置的即时恢复能力可以省去繁琐的回零操作,提高生产效率。此外,在物料搬运设备如起重机、吊车、升降机中,ADMT4000可用于拉线式编码器,精确测量钢缆或拉线的伸缩长度,其多圈检测能力完美匹配这类长行程应用的需求。
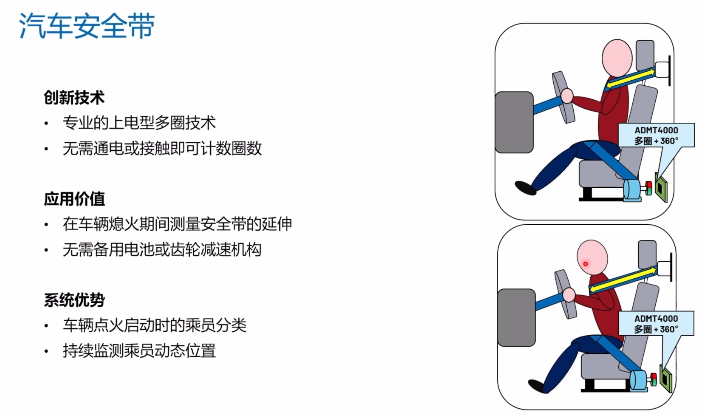
在汽车行业,ADMT4000同样适用于多个对安全性和可靠性要求极高的场景。例如汽车安全带卷收器需要精确记录安全带拉出的圈数,以确定其伸出长度。该数据对于安全气囊控制器实现预紧和限力等高级保护功能至关重要,ADMT4000的多圈无源检测特性可为此提供可靠的数据支持。
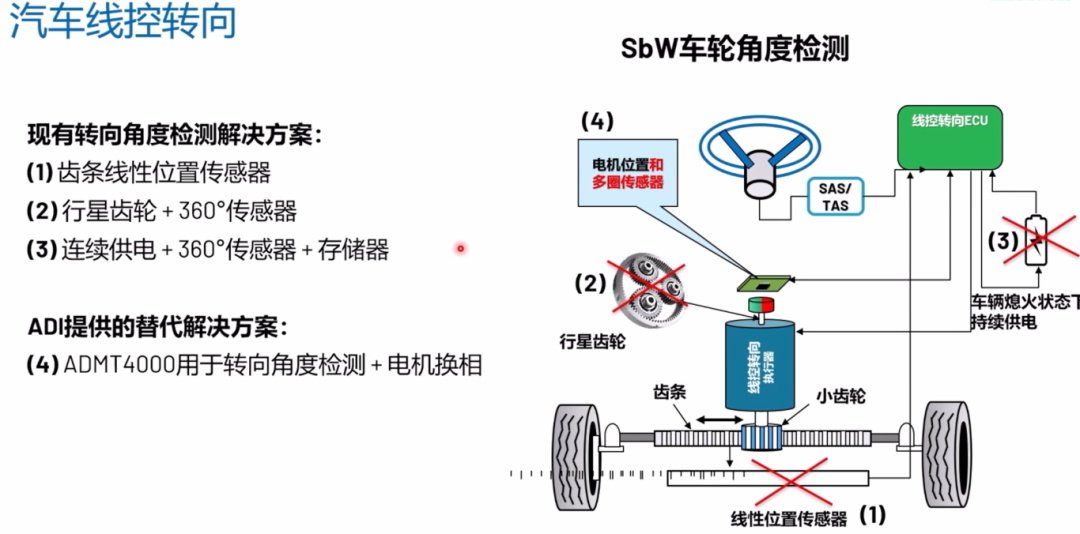
在没有机械连接的线控转向系统中,方向盘的绝对旋转位置是控制车辆转向的核心输入信号。ADMT4000能够提供高精度的方向盘绝对位置,且其无源特性确保了在车辆启动瞬间即可获得准确的转向意图,是实现此类安全关键功能的理想选择等。
扫码查看ADMT4000更多详情信息
-
传感器
+关注
关注
2567文章
53213浏览量
769392 -
ADI
+关注
关注
149文章
46049浏览量
262875 -
运动控制
+关注
关注
4文章
736浏览量
33625 -
人形机器人
+关注
关注
7文章
760浏览量
17704
原文标题:告别齿轮与电池,ADMT4000如何破解人形机器人关节位置记忆难题?
文章出处:【微信号:analog_devices,微信公众号:analog_devices】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录

ADI传感器进军人形机器人等,多款方案受关注

伺服电动缸在人形机器人中的应用
《电子发烧友电子设计周报》聚焦硬科技领域核心价值 第23期:2025.08.04--2025.08.08
为什么人形机器人更讨人喜欢?
机器人传感器
工业机器人的末端关节旋转该精确控制?
新一代磁性位置传感器助力无人机、轻工业、医疗以及太空机器人应用有哪些?
具有真正上电能力与零功耗的多圈位置传感器(TPO)

人形机器人关节模组关键技术解析,及产业链上游电机/传感器企业一览

ADMT4000真通电多圈传感器技术手册
Analog Devices Inc. ADMT4000通电多圈位置传感器数据手册





 工商网监
工商网监
评论