 智能制造工业机器人技术发展趋势
智能制造工业机器人技术发展趋势

(一)大范围动态场景理解
工业机器人在自主制造场景中,对环境和运行状态感知要求高,作业环境多变、状态难测。需构建动态语义地图,解决机器人精细化路径规划、协同作业控制难题,实时感知机器人与工件信息以全面监控制造状态。
长期以来,大型部件制造信息感知多依赖人工,多机器人视觉感知系统应用后,人为干涉多、自主性低、协同弱的问题仍未有效改善。面向大型复杂部件制造的多机器人智能感知与认知研究刚起步,多模态感知理论体系亟待完善。针对复杂工业动态场景的大范围场景感知与理解,是未来重要发展方向。
(二)集群化作业
智能制造关键在于机器设备互联、互通、互融,集群机器人协同作业为高效协同、自主组织等智能制造理论与技术提供关键支撑。
集群机器人系统由多个单体机器人组成,通过信息交互等构建行为协同与自主决策能力,适应复杂作业任务。与单体机器人相比,它能重塑大型复杂构件制造过程,执行难以完成的制造与检测任务,支撑提质、增效、降本和柔性生产。智能化集群机器人制造是重大装备制造的有效形式和发展趋势。
(三)柔性作业
目前工业机器人作业调试多采用人工示教方式。高端装备关键核心部件结构复杂、质量要求高、批量小、型号多,机器人定制化调试模式难以胜任。
智能制造工业机器人需适应小批量、多品种生产模式,增强生产线智能性和灵活性。执行接触型作业时,机器人要准确跟踪轨迹,控制末端执行器与工件的位姿和接触力。人工操作在智慧性等方面有优势,工业机器人需在保持自身强项的同时增强柔性作业能力。配置功能增强型传感器和末端执行器,提升操控性能,是重要发展方向。
(四)具身智能
工业制造模式转向小批量、多品种柔性离散作业,制造场景、环境和任务存在不确定性。常规工业机器人感知与作业能力有限,难以适应复杂环境。
具身智能是 AI 技术重要分支,是工业机器人新兴研究方向。具身智能机器人能理解自然语言、感知环境、自主规划任务并与环境交互,突出与环境的强关联和交互,可更好应对柔性离散制造环境。相关技术涉及多模态感知系统等,在智能制造技术体系中的地位不断提升。
(五)网络化协同
工业机器人系统有序执行智能制造作业,需机器人个体间通信与计算支持。云计算、边缘计算等信息技术发展迅速,相关部署架构及平台集成异构信息互通与计算力分配功能,克服单个设备局限,是解决机器人通信计算融合问题的有力依托(见图 3)。
“云边融合”作业模式集成多种传感器信息,深度感知生产实体特性与状态,实时动态进行数据交换、计算分配和任务分发,延伸至智能制造设备,驱动机器人与其他设备高效共享资源,支持制造系统网络化、智能化和多设备协同。构建高效安全的集群机器人通信计算一体化网络架构,保障机器人间低时延、高安全网络传输及计算分配,是未来重点发展方向。
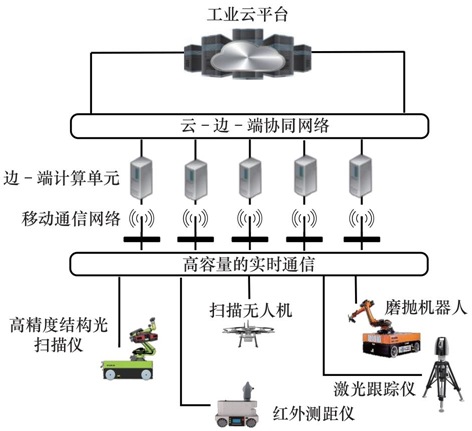
云 - 边 - 端协同的智能制造集群机器人作业架构
(六)数字孪生
数字孪生以数字化方式创建实体虚拟模型,模拟物理实体在现实环境中的变化。对于智能制造工业机器人,基于数字孪生技术开展虚实交互等活动,可增强系统功能,监控运行情况,预测和优化作业参数,提升复杂环境作业性能。
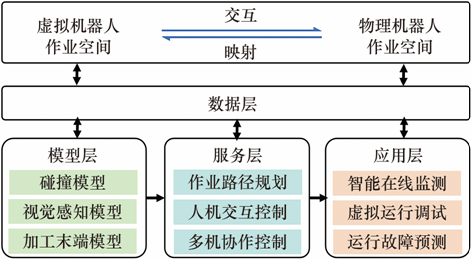
工业机器人数字孪生系统
相关系统已在多类装备制造领域应用,如飞机智能制造平台将实际生产数据融入数字孪生系统,提前规划任务、调整参数。但机器人与制造环境复杂交互的数字孪生存在建模精度不高、数据交互整合困难、预测准确性和实时性欠佳等问题,需开展技术攻关推动发展与应用。
结语:
工业制品市场需求变化迅速,先进制造技术也在快速迭代,小批量、多品种、柔性化、易部署的多机器人智能制造系统将成为发展主流,多机交互、人机交互、机器人与场景交互的广度和深度也将不断拓展。
为应对复杂的交互需求,智能制造工业机器人技术需要在动态场景理解、集群化作业、柔性作业、具身智能、网络化协同、数字孪生等方向着力突破,探索构建感知 – 规划 – 控制一体化的复杂多维协同作业机制。加快形成制造模式柔性化、制造过程信息化、制造工序无人化的新型生产方式,为化解高端装备制造难题提供新型解决方案,支撑高端装备制造业的数字化、网络化、智能化转型升级。
审核编辑 黄宇
-
控制系统
+关注
关注
41文章
6797浏览量
112295 -
工业机器人
+关注
关注
91文章
3461浏览量
94345 -
智能制造
+关注
关注
48文章
5920浏览量
78021
发布评论请先 登录
工业机器人:现代制造业的智能引擎
智造未来:工业机器人关键技术突破与场景化应用趋势





 工商网监
工商网监
评论