 看看那些用树莓派打造的自动驾驶汽车!
看看那些用树莓派打造的自动驾驶汽车!

在崭新的汽车时代门槛前,通往未来的道路不再仅由沥青铺就,还承载着人工智能(AI)的无限可能和突破性的创造力。
在现实世界中驾驶颇具挑战,因为可能会发生各种意外事件。正因如此,打造一辆真正安全的自动驾驶汽车,远非简单地“构建一个拥有众多编程规则的高级机器人”那么简单;它要求机器能够“学习”如何应对意外情况。
尽管这一点仍远未达到完美,但人工智能的持续进步使其成为可能。人工智能的发展推动了深度神经网络和复杂算法的研发。这些系统能够从海量数据中学习,识别复杂模式,并实时做出决策,使自动驾驶汽车的处理能力日益接近人类的感知和反应水平。
在本榜单中,我们精选了一些基于多种开发板的优秀DIY自动驾驶汽车项目。它们难度各异,无论你是初次探索自动驾驶汽车领域,还是希望学习新项目提升技能,都能找到合适的挑战。
不过,在开始之前,让我们先了解一些关于自动化的重要知识,以及在着手这些挑战前你需要考虑的事项。准备好了吗?出发!
既然我们讨论的是适应现实环境的项目,那么了解根据汽车工程师学会(SAE)划分的不同自动化级别将大有好处。这些级别包括:
0级 - 无自动化:车辆无自动化功能。驾驶员负责所有驾驶任务,包括转向、加速、制动和决策。
1级 - 驾驶辅助:车辆可能配备驾驶辅助系统,如自适应巡航控制或车道保持辅助。但驾驶员必须时刻保持警惕,随时准备接管控制。
2级 - 部分自动化:车辆能够同时控制转向、加速和制动,如高级驾驶辅助系统。但驾驶员必须双手放在方向盘上,随时准备接管控制。
3级 - 有条件自动化:车辆在某些条件或环境下(如高速公路上)能够自主驾驶。当系统请求时,驾驶员必须接管控制,但在系统运行时,驾驶员可以从事与驾驶无关的活动。
4级 - 高度自动化:车辆能够在多种条件和场景下自主驾驶,如地理围栏区域内(如城市区域或共享汽车区域)。驾驶员无需时刻在场,系统能够在无需人工干预的情况下处理复杂场景的驾驶任务。
5级 - 完全自动化:车辆完全自主驾驶,无需驾驶员干预。无需方向盘、踏板或手动控制装置,车辆能够在任何条件下无需人类驾驶员在场的情况下行驶。
了解了不同自动化级别的概述后,让我们来看看在选择项目前你需要考虑哪些因素。
注意事项
先停下脚步,仔细阅读!
如果你打算涉足自动驾驶汽车领域,并希望复制一个涉及玩具车或机器人套件的项目,那么采取周密且知情的策略至关重要。虽然本文列出的想法可能乍一看似乎简单直接,但它们为你探索人工智能和机器人技术的先进概念提供了独特的机会。
以下是一些重要的注意事项,帮助你顺利开始项目并最大化成功机会:
明确目标:在开始之前,明确你希望通过项目实现什么目标。你是对了解自主导航的基础知识感兴趣?还是希望开发一个具备对象识别和路线规划等高级功能的更复杂系统?明确愿景将有助于指导你的硬件和软件选择。
选择合适的套件或汽车:选择合适的机器人套件或玩具车是关键步骤。确保你选择的模型与你打算使用的工具和组件兼容。对于初学者来说,拥有良好文档和社区支持的机器人套件将大有裨益,而改装玩具车则提供了一种更加个性化和实验性的方法。
投资高质量组件:为了获得满意的结果,选择能够确保可靠性能的高质量组件。摄像头、激光雷达和超声波传感器等外围设备,以及执行器和控制器,在构建有效的自主系统中起着至关重要的作用。传感器的准确性和执行器的稳健性将影响车辆的精确导航能力。
有些项目极具挑战性——你能胜任吗?
学习并实验人工智能算法:实施人工智能算法是任何自动驾驶汽车项目的核心。熟悉机器学习、图像处理和路径规划算法等技术。使用流行的库和框架,如TensorFlow、OpenCV和机器人操作系统(ROS),以简化集成和实验过程。
迭代开发与测试:从基本原型开始,在受控环境中进行测试,然后再进入更复杂的场景。在测试过程中收集数据对于微调和改进算法以及车辆性能至关重要。根据需要审查和修改你的方法。
与社区互动:参与与机器人技术和自动驾驶汽车相关的在线论坛可以提供宝贵的见解和支持。分享你的经验可以帮助你解决问题、获取建议,并了解最新趋势和技术。
考虑伦理和安全问题:即使对于小型项目,考虑伦理和安全影响也很重要。确保你的项目不仅功能正常,而且以安全、负责任的方式运行。注意传感器收集的数据的隐私问题以及车辆的操作安全性。
遵循这些指南并采取细致入微的方法,你将能够创建一个创新且有效的自动驾驶汽车项目。记住,开发之旅既是挑战也是学习机会——利用每一步来扩展你的技能并探索新的可能性。
JetAuto ROS机器人

JetAuto提供的清晰且富有教育意义的教程也使初学者能够轻松上手,同时提供了一个由Jetson Nano驱动的复杂机器人技术平台。
支持机器人操作系统(ROS),用户可以预检查运动算法,避免昂贵的错误,并通过rviz(一个在测试机器人编程和行为时准确复制现实世界的虚拟环境)可视化整个导航过程。
与激光雷达和深度摄像头的集成尤其值得注意。借助这些技术,JetAuto能够快速准确地执行同时定位与地图构建(SLAM)。这意味着,即使在陌生环境中,机器人也能巧妙地规划路径,避开障碍物,并实时调整路线以实现自主驾驶并克服意外情况。
得益于众多高级功能,从这个平台可以学到很多东西,它还可以进行交互、识别手势、接收语音命令,甚至识别面部表情。
起价约400美元,这个平台是教育AI项目的绝佳选择,因为它也可以与其他开发板(如Jetson Orin Nano或Raspberry Pi 5)一起使用——只需确保指定你将使用的开发板以选择合适的套件。
难度:初学者
设计者:Hiwonder
项目页面:JetAuto ROS Robot、GitHub、Hackster(评测)
核心组件:SBC(Raspberry Pi 5、Jetson Nano、Jetson Orin Nano)、智能伺服、激光雷达、4个车轮、阳极氧化金属支架、3D深度摄像头、7英寸LCD屏幕(可选)
Deep PiCar
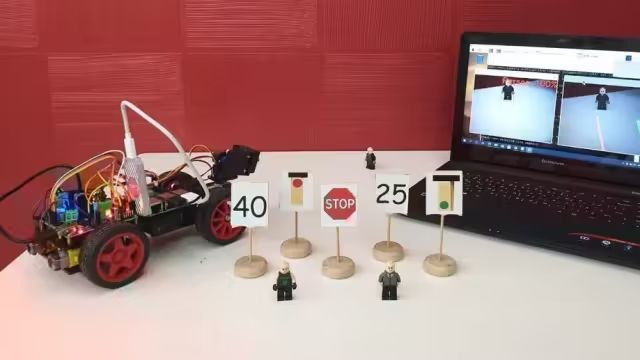
Deep PiCar是自动驾驶汽车的小型复制品,使用树莓派作为测试和开发自动驾驶技术的基础。
受Nvidia的DAVE-2启发,Deep PiCar采用深度神经网络执行实时感知和控制任务。车辆配备广角USB摄像头和Google Edge TPU加速器,能够快速处理机器学习推理,这对于自主导航至关重要。
这个项目的目标是探索树莓派通过深度学习支持自主车辆控制的能力。项目涉及组装机器人套件、安装OpenCV和TensorFlow等软件,以及配置电子组件和电机。
汽车经过训练可以识别交通标志、检测行人,并对特定路况做出反应,如在红绿灯处停车或根据标志调整速度。
该套件已更新,最新版本PiCar-X售价约90美元。这个新套件与Raspberry Pi Zero、3B、3B+、4和5兼容,并且有多个教程可供参考。
难度:中级
设计者:SunFounder
项目页面:Instructables、GitHub
核心组件:Raspberry Pi(Zero W、Zero 2 W、3B、3B+、4或5)、Google Edge TPU协处理器、USB摄像头、HDMI适配器
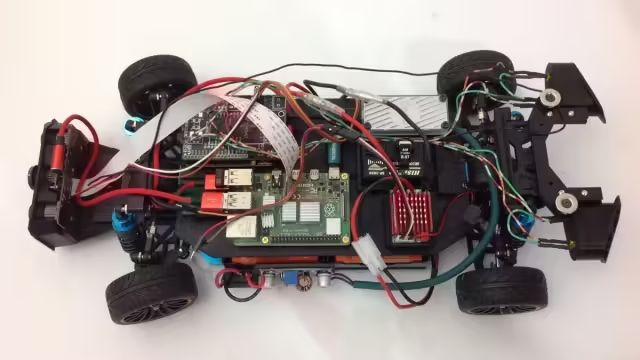
DIY AI自动驾驶汽车

这个项目仍在进行中,但如果你正在寻找一个更具挑战性的冒险,即在一个比例模型上实现自动驾驶,同时摸索算法,那么这个项目可能会很有趣。
汽车包括两个摄像头:一个配备广角镜头的120万像素摄像头,以及一个可以确定其他物体距离的立体摄像头。它还配备了距离传感器——可以是Sharp红外传感器或VL53L0激光测距模块。
为了避免户外测试,设计师创建了一个跑步机,用于控制和导航测试。
设计师还提供了大量相关部件的设计和3D打印技巧。如果你的打印机无法胜任任务,Craftcloud值得考虑。无论如何,都有大量STL文件可供复制,如果需要比PLA提供的强度更高,建议选择ABS、PETG或尼龙。
目前,仅分享了项目硬件部分的范围。在第64步(是的,这是一个非常详细的教程)中,作者解释说,与其他模型使用激光雷达不同,他选择使用摄像头结合Google Coral单元来高速检测车道线、交通标志、交通信号灯和其他物体,类似于特斯拉的方法。这只是提到的几个方面之一,可以帮助创作者进一步开发这个项目的软件部分。
难度:专家
设计者:jmoreno555
项目页面:Instructables、GitHub
核心组件:HSP 94123套件、Raspberry Pi 4、Wemos D1 R32、Google Coral USB、120万像素摄像头、立体摄像头、Sharp红外传感器或VL53L0激光器
原文地址:
https://all3dp.com/2/self-driving-car-projects-arduino-raspberry-pi/
-
自动驾驶
+关注
关注
790文章
14362浏览量
171093 -
树莓派
+关注
关注
122文章
2031浏览量
107663 -
汽车
+关注
关注
15文章
3882浏览量
39661
发布评论请先 登录
谷歌的自动驾驶汽车是酱紫实现的吗?
细说关于自动驾驶那些事儿
自动驾驶的到来
AI/自动驾驶领域的巅峰会议—国际AI自动驾驶高峰论坛
自动驾驶汽车的处理能力怎么样?
边缘计算在自动驾驶汽车的应用
基于ld303+树莓派的自动驾驶
如何打造自动驾驶「自行车」的呢
树莓派也能实现海上自动化驾驶?






 工商网监
工商网监
评论