 无人机电池通讯接口应用:CANFD工业级芯片的选型与技术要点
无人机电池通讯接口应用:CANFD工业级芯片的选型与技术要点

摘要 :随着无人机技术的飞速发展,其电池管理系统对于高可靠、高速通讯接口的需求日益凸显。本文深入探讨了在无人机电池通讯接口应用中,选用国科安芯推出的CANFD工业级芯片ASM1042I的关键考量因素与技术要点。通过对芯片特性、性能指标、测试数据及应用适配性等多维度的分析,旨在为无人机电池管理系统的设计与优化提供坚实的技术支撑与选型参考,以满足无人机在复杂工况下对电池状态监测与管控的严苛要求。
关键词 :无人机电池;CANFD;工业级芯片;通讯接口;应用领域
一、引言
无人机作为一种先进的航空设备,其电池管理系统是保障飞行安全与性能的核心环节。高效的电池通讯接口能够实现电池与无人机控制单元之间的实时、准确数据交互,对于监测电池状态、优化能量管理以及预防电池故障至关重要。CANFD(Controller Area Network with Flexible Data-rate)作为一种先进的通讯总线技术,以其高数据传输速率、强抗干扰能力和卓越的可靠性,在工业控制、汽车电子等领域广泛应用,并逐渐成为无人机电池通讯接口的理想选择。本文选择国科安芯推出的CANFD工业级芯片ASM1042I作为分析案例。
二、无人机电池通讯接口的技术需求
(一)高数据传输速率
无人机在飞行过程中,电池状态信息(如电压、电流、温度等)需要实时快速传输至控制单元,以便及时调整飞行状态和能量分配。尤其是在电池高负荷运行或出现异常情况时,快速的数据更新对于保障飞行安全至关重要。ASM1042I支持最高达5Mbps的数据传输速率,相较于传统CAN总线有了显著提升,能够满足无人机电池管理系统对实时性的严格要求。
(二)强大的抗干扰能力
无人机的飞行环境复杂多变,面临各种电磁干扰源,如电机、电子调速器、周边无线通信设备等。电池通讯接口需要在这样的高干扰环境下稳定工作,确保数据传输的准确性。ASM1042I采用差分传输方式,并具备良好的抗电磁干扰(EMC)性能,可有效抵御外界干扰对数据传输的影响。
(三)高可靠性与安全性
电池作为无人机的关键部件,其状态直接关系到飞行安全。通讯接口必须具备高可靠性,能够长时间稳定运行,并具备故障诊断与保护功能。一旦出现通讯故障或异常数据传输,可能会导致无人机失控或电池损坏,引发严重安全事故。因此,电池通讯接口芯片需要具备完善的保护机制和可靠性设计。
(四)适配多种工作环境
无人机可能在不同温度、湿度、气压等环境条件下工作,通讯接口芯片需要具备良好的环境适应性。能够在宽温度范围内稳定工作,抵御环境因素对性能的影响,确保电池管理系统在各种恶劣环境下的正常运行。
三、CANFD工业级芯片的应用适配性
(一)在复杂电磁环境下的抗干扰性能
无人机的飞行环境复杂多变,面临各种电磁干扰源,如电机、电子调速器、周边无线通信设备等。ASM1042I采用差分传输方式,这种传输方式通过两条导线上传输信号,一条为CANH(高电平线),另一条为CANL(低电平线)。两条导线上的信号电平相反且幅度相等,当受到外界电磁干扰时,干扰信号会在两条导线上产生相同的电平波动(共模干扰)。由于接收器检测的是两条导线之间的电位差,共模干扰会相互抵消,从而有效降低外界干扰对信号传输的影响。
此外,ASM1042I还具备良好的抗电磁干扰(EMC)性能。在电磁兼容性(EMC)方面,CANFD工业级芯片ASM1042I支持SAEJ2962-2和IEC62228-3等相关标准,无需额外添加共模扼流圈等抗干扰元件即可实现较高的抗干扰能力。这大大降低了系统设计的复杂性和成本,同时提高了通讯接口的抗干扰能力,使其能够在无人机复杂电磁环境中稳定工作。
(二)高数据传输速率对电池管理效率的提升
ASM1042I支持最高达5Mbps的数据传输速率,相较于传统CAN总线有了显著提升。这一高速率特性对于无人机电池管理系统具有重要意义。无人机在飞行过程中,电池状态信息(如电压、电流、温度等)需要实时快速传输至控制单元,以便及时调整飞行状态和能量分配。尤其是在电池高负荷运行或出现异常情况时,快速的数据更新对于保障飞行安全至关重要。
例如,在无人机执行高速飞行任务或进行复杂动作时,电池的放电电流可能会瞬间增大,导致电池电压快速下降。此时,电池管理系统需要在极短的时间内检测到这一变化,并将数据传输至控制单元。控制单元根据这些实时数据调整飞行姿态、降低电机转速或采取其他措施,以避免电池过放电损坏,同时确保飞行安全。如果通讯接口的数据传输速率较低,可能会导致数据更新不及时,控制单元无法及时做出反应,从而增加飞行风险。
(三)高可靠性和安全性特性对无人机飞行安全的保障
电池作为无人机的关键部件,其状态直接关系到飞行安全。通讯接口必须具备高可靠性,能够长时间稳定运行,并具备故障诊断与保护功能。一旦出现通讯故障或异常数据传输,可能会导致无人机失控或电池损坏,引发严重安全事故。因此,电池通讯接口芯片需要具备完善的保护机制和可靠性设计。
ASM1042I具备多种高可靠性和安全性特性。例如,其静电放电(ESD)保护等级高达±15kV,能够有效防止静电放电对芯片的损坏。在实际应用中,无人机在起降过程中可能会与地面或其他物体接触,产生静电放电现象。如果没有足够的ESD保护,静电放电产生的高电压脉冲可能会击穿芯片内部的电子元件,导致芯片损坏或功能异常。具备高ESD保护等级的ASM1042I能够有效抵御此类风险。
此外,ASM1042I还具有总线故障保护功能,能够抵御电池系统中可能出现的过电压和反极性连接等异常情况。在无人机电池充电或维护过程中,可能会出现接线错误或电池故障导致的过电压情况。总线故障保护功能可以防止过电压损坏通讯接口芯片,保障整个电池管理系统的安全。
(四)宽温度适应性对无人机在不同环境下的适用性
无人机可能在不同温度、湿度、气压等环境条件下工作,通讯接口芯片需要具备良好的环境适应性。能够在宽温度范围内稳定工作,抵御环境因素对性能的影响,确保电池管理系统在各种恶劣环境下的正常运行。
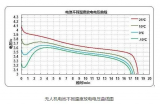
ASM1042I设计了宽温度范围的工作区间,如工业级可达-40℃~85℃,企业宇航级可达-55℃~125℃。这一特性使得无人机能够在高温沙漠环境、低温极地环境以及高海拔地区等多种复杂气候条件下稳定运行。在高温环境下,芯片的电气性能和可靠性不会因温度升高而显著下降,能够持续准确地传输电池状态数据。在低温环境下,芯片也不会因低温导致性能衰退或启动困难,确保无人机在寒冷地区的正常起飞和飞行。
(五)低功耗特性对无人机续航能力的提升
在功耗性能方面,ASM1042I在正常工作模式下的显性功耗和隐性功耗均处于较低水平,待机模式功耗更是微乎其微。在正常工作模式下的显性功耗为44.7mA(典型值),隐性功耗为1.33mA(典型值),待机模式功耗仅为0.1μA(典型值)。低功耗特性有助于延长无人机的续航时间,尤其在待机状态下可大幅降低电量消耗,提高能源利用效率。
无人机在执行长时间飞行任务或处于待命状态时,电池电量的消耗主要集中在电池管理系统和通讯接口等部分。采用低功耗的ASM1042I可以有效减少这些部分的电量消耗,使得更多的电量能够用于驱动电机,延长无人机的飞行时间。这对于需要长时间悬停、长距离飞行或在偏远地区执行任务的无人机尤为重要。
(六)多节点通信能力对无人机复杂网络架构的支持
多节点测试进一步验证了ASM1042I在大规模CANFD网络中的通信能力。在25节点多节点通信测试环境中,以1Mbps的仲裁域波特率和5Mbps的数据域波特率进行数据传输,发送总帧数为120000帧,接收总帧数同样为120000帧,错误帧数量为0,表明芯片在多节点组网情况下具备良好的通信兼容性和稳定性。
在无人机集群应用中,多架无人机需要协同作业,共同完成复杂的任务,如大面积地形测绘、灾情侦察、物流配送等。每架无人机的电池管理系统通过CANFD网络与其他无人机的控制系统以及地面指挥中心进行通信。这种多节点通信能力可以实现无人机之间实时共享电池状态信息,便于地面指挥中心统一调度和管理。例如,在物流配送中,地面指挥中心可以根据每架无人机的电池剩余电量合理分配任务,确保无人机能够顺利完成配送任务并安全返回,提高了整个无人机集群的运行效率和可靠性。
(七)灵活性与兼容性对系统集成的便利性
ASM1042I的I/O电压范围支持3.3V和5VMCU,能够适配不同厂商的微控制器,方便系统集成。芯片在未供电时具有理想无源行为,总线和逻辑引脚处于高阻态,不会对总线造成干扰,实现上电/断电无干扰运行。其引脚定义和功能设计符合行业标准,易于与其他CANFD总线设备进行互连互通。
在无人机电池管理系统的设计中,可能需要选用不同厂商的微控制器(MCU)来实现不同的功能模块,如电池状态监测、电机控制、飞控系统等。ASM1042I的灵活性与兼容性使得这些不同厂商的MCU能够通过CANFD总线进行高效通信,减少了系统集成的复杂性和成本。
四、应用领域解析
(一)工业级无人机的远程监测与控制
在工业巡检领域,无人机被广泛应用于电力线路巡检、石油化工设备巡检、大型桥梁巡检等。这些应用通常需要无人机在较大的区域内飞行,并实时将电池状态、飞行姿态等数据传输回地面控制中心。采用ASM1042I的无人机电池管理系统可以满足这些要求。
例如,在电力线路巡检中,无人机需要沿着高压输电线路飞行,检测线路的运行状态、绝缘子的损坏情况等。由于电力线路通常分布在广阔的区域,无人机需要具备较长的续航时间和稳定的通信能力。ASM1042I的高数据传输速率和低功耗特性使得无人机延长飞行时间。此外,其强大的抗干扰能力可以抵御高压输电线路产生的强电磁干扰,确保通信的可靠性。通过远程监测与控制,地面工作人员可以及时发现线路故障,提高巡检效率和电网运行的安全性。
(二)农业无人机的精准农业应用
农业无人机在精准农业中发挥着重要作用,如农药喷洒、种子播种、农田监测等。在这些应用中,无人机需要根据农田的地形、作物生长情况等信息进行精确的作业规划和实时调整。电池管理系统需要实时监测电池状态,并将数据传输至无人机的控制系统,以确保无人机在作业过程中的动力供应和飞行安全。
ASM1042I的高可靠性、宽温度适应性和低功耗特性使其适合农业无人机的应用环境。农业无人机通常在户外作业,面临各种天气条件,如高温、低温、潮湿等。ASM1042I能够在宽温度范围内稳定工作,不受环境温度变化的影响。同时,其低功耗特性可以延长无人机的作业时间,减少因电池电量不足导致的中途返航次数。此外,芯片的高抗干扰能力可以抵御农田中可能出现的电磁干扰源,如灌溉设备、农业机械等,确保电池状态数据的准确传输,帮助无人机实现精准的农药喷洒和农田监测,提高农业生产的效率和质量。
(三)物流无人机的高效配送与管理
物流无人机用于实现最后一公里的快递配送,提高物流效率和服务质量。在物流配送过程中,无人机需要频繁起降、长距离飞行,并与地面物流管理系统进行实时数据交互。电池管理系统在确保无人机飞行安全和优化电池使用效率方面起着关键作用。
采用ASM1042I的物流无人机电池管理系统可以提供高速、可靠的数据传输和多种保护功能。在无人机起飞前,电池管理系统通过CANFD网络将电池状态信息传输至地面物流管理系统,确保电池电量充足、性能良好。在飞行过程中,实时监测电池电压、电流和温度等参数,并将数据传输至无人机的飞控系统,以便及时调整飞行轨迹和速度,避免电池过放电或过热。在多机协同配送场景下,ASM1042I的多节点通信能力可以实现无人机之间实时共享电池状态信息,便于地面物流管理系统统一调度和管理,优化配送路径,提高物流效率。
(四)科研无人机的实验数据采集与传输
在科研领域,无人机被广泛应用于大气研究、地质勘探、生物多样性监测等。这些应用通常需要无人机携带各种科研仪器和传感器,采集大量的实验数据,并实时传输至地面科研设备进行分析。例如,在大气研究中,无人机可以携带气象传感器,采集大气中的温度、湿度、气压、风速等数据,用于研究大气污染、气候变化等。
ASM1042I的高数据传输速率和多节点通信能力可以满足科研无人机对数据采集与传输的高要求。科研无人机通常搭载多种传感器,产生大量的异构数据。通过CANFD网络,这些传感器可以与无人机的控制系统和数据采集模块进行高速通信,实现数据的实时采集和融合。同时,ASM1042I的多节点通信能力可以支持多个科研无人机组成协同观测网络,共同采集不同区域的数据,提高科研实验的效率和覆盖范围。此外,芯片的高可靠性和抗干扰能力可以确保在复杂自然环境下的数据传输质量,保障科研数据的完整性和准确性。
五、结论与展望
综上所述,CANFD工业级芯片凭借其卓越的抗干扰能力、高数据传输速率、高可靠性、宽温度适应性、低功耗特性、多节点通信能力和良好的灵活性与兼容性,在无人机电池通讯接口应用中具有显著的优势。这些特性能够满足无人机在复杂工况下对电池状态监测与管控的严苛要求,为无人机在各个应用领域的发展提供了有力的技术支持。
审核编辑 黄宇
-
无人机
+关注
关注
231文章
10876浏览量
187424 -
CANFD
+关注
关注
0文章
90浏览量
5390
发布评论请先 登录
低空新赛道下,培训无人机电池如何选更专业?

科达嘉电感在无人机系统中的应用
工业无人值守无人机充电连接解决方案

植保无人机电池的保养注意事项
植保无人机电池的选择和保养策略
植保无人机电池性能测试方法
MOS 管在无人机电池中的关键应用

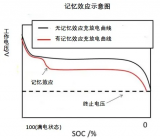
如何有效应对植保无人机电池出现记忆效应





 工商网监
工商网监
评论