 一文详解CKS32K148微控制器的LPI2C模块
一文详解CKS32K148微控制器的LPI2C模块

MCU微课堂
CKS32K148 LPI2C
第六十期 2025.07.14
LPI2C(Low Power Inter-Integrated Circuit)是CKS32K148微控制器中的一个低功耗I2C接口模块。CKS32K148款MCU存在LPI2C0、LPI2C1两个LPI2C,支持标准模式(100 kbps)、快速模式(400 kbps)、快速+模式(1Mbps)和高速模式(3.4 Mbps)通信速率。
主要特性
兼容性:支持 I2C 总线标准模式、快速模式、快速+模式、从机模式下的高速模式 (HS)。
低功耗:支持低功耗模式。
多主模式:支持多主操作,包括同步和仲裁机制。
中断和 DMA 支持:提供中断和 DMA 支持,减少 CPU 负载。
可配置性:可配置广播呼叫、7 位或 10 位地址模式。可选择SOSC、SIRC、FIRC、SPLL时钟源,支持时钟延长、时序可通过寄存器灵活配置。
错误检测:支持总线忙检测、仲裁丢失、FIFO错误、端口低电平超时、位错误检测。
主机特性
4字深度的 命令/发送/接收FIFO
命令 FIFO 等待空闲 I2C 总线:在启动传输之前,命令 FIFO 会等待 I2C 总线空闲
命令 FIFO 支持启动(重复)START 和 STOP 条件:可以发起一个或多个主接收器传输
STOP 条件可以从命令 FIFO生成,也可在发送 FIFO为空时自动生成
主机请求输入:用于控制 I2C总线传输的启动时间
灵活的接收数据匹配功能:可以在数据匹配时生成中断,并丢弃不需要的数据
标志位和可选中断:用于指示重复 START 条件、STOP 条件、仲裁丢失、意外的 NACK 以及命令字错误
支持可配置的总线空闲超时和引脚低电平超时:增强总线的鲁棒性和可靠性
从机特性
独立的 I2C 从机寄存器:减少因主/从切换带来的软件开销
支持 7 位或 10 位地址、地址范围、SMBus 警报和通用呼叫地址:提供灵活的地址配置和通信功能
发送/接收数据寄存器支持中断或 DMA 请求:便于高效的数据收发
软件可控制的 ACK 或 NACK:支持在 ACK/NACK 位上进行可选的时钟拉伸
可配置的时钟拉伸:避免发送 FIFO 下溢和接收 FIFO 上溢错误
标志位和可选中断:用于指示数据包结束、STOP 条件或位错误检测
主机/从机传输数据
CKS32K148系列MCU的LPI2C框图如下所示:
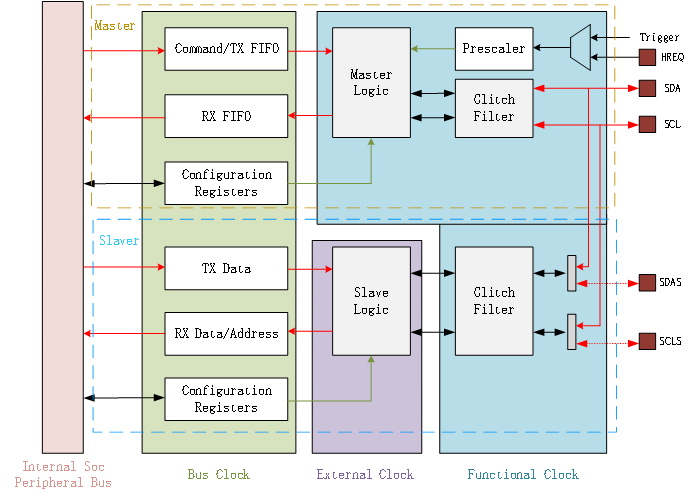
图1 LPI2C框图
LPI2C 主机和从机控制器逻辑相互独立,用于在 I2C 总线上分开执行所有主/从模式传输任务。这种独立性使得主/从控制器能够高效地管理总线通信,提高了系统的灵活性和性能。
LPI2C端口
LPI2C在不同外部条件下支持不同端口配置模式,通过MCFGR1[26:24]寄存器配置。
开漏支持:LPI2C主设备默认将SDA和SCL引脚配置为开漏模式。
高速模式支持:高速模式的支持也取决于具体的设备,并且要求SCL引脚支持I2C规范中所需的电流源上拉。
超快速模式支持:LPI2C主设备还支持使用SDA和SCL引脚实现I2C超快速模式所需的仅输出推挽功能。支持超快速模式还需要设置MCFGR1[IGNACK]位。
推挽式双线支持:LPI2C主设备还支持推挽式双线配置,如果LPI2C是唯一的主设备且总线上的所有I2C引脚电压相同,则可以支持部分高速模式。
推挽式四线支持:推挽式4线配置将SCL/SDA引脚用于输入数据;SCLS/SDAS引脚用于输出数据,且极性可配置。注意在使用此四线配置时,LPI2C主设备逻辑和LPI2C从设备逻辑无法连接到单独的I2C总线。
LPI2C主机传输
当LPI2C被启用时,它会持续监控I2C总线,以检测总线是否处于空闲状态(通过MSR[BBF]标志位)。当检测到总线空闲超时(由 MCFGR2[BUSIDLE] 配置)或者STOP条件时,I2C总线将被视为空闲。
在I2C总线空闲后,如果发送 FIFO不为空,并且主机请求被触发或禁用,LPI2C主控制器将启动I2C总线上的传输。这一过程包括以下步骤:
等待总线空闲时间
等待的时间= (MCCR0[CLKLO] + 1) * 预分频器 (MCFGR1[PRESCALE])。
发送 START 条件和地址字节
使用主时钟配置寄存器 0 (MCCR0) 中的时序配置发送 START 条件和地址字节;如果配置为高速模式传输,则使用主时钟配置寄存器 1 (MCCR1) 中的时序配置。
执行主发送或主接收传输
根据发送 FIFO 的配置执行主发送或主接收传输。
在最后一次主接收传输中发送 NACK
除非发送 FIFO 中的下一个命令也是接收数据命令且发送 FIFO 不为空,否则在最后一次主接收传输中发送 NACK。
发送重复 START 或 STOP 条件
根据发送 FIFO 和/或 MCFGR1[AUTOSTOP] 的配置发送重复 START 或 STOP 条件。
当 LPI2C 主控制器被禁用时(无论是由于 MCR[MEN] 被清除还是由于模式进入自动禁用),LPI2C 将继续清空发送 FIFO(在发送 FIFO 为空后,LPI2C 会自动生成 STOP 条件)直到发送 STOP 条件。
LPI2C从机传输
当LPI2C被启用前可对从机的地址进行匹配设置:支持 7 位或 10 位地址模式,地址可以配置匹配范围。
等待主机的 START 条件:从机监控 I2C 总线,等待主机发送 START 条件和从机地址。
地址匹配:如果接收到的地址与从机配置的地址匹配,从机发送 ACK 响应,然后LPI2C从机会自动执行从机发送(slave-transmit)或从机接收(slave-receive)传输。
发送、接收数据:从机通过发送数据寄存器 STDR 发送数据;通过接收数据寄存器SRDR接收主机发送的数据。
处理接收完成:如果检测到 STOP 条件或数据包结束,从机可以触发中断或标志位,通知软件处理接收到的数据。
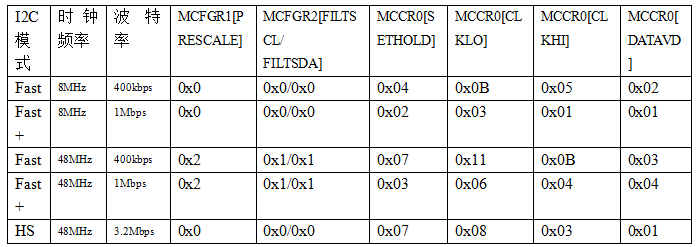
LPI2C主机时序配置说明
LPI2C通讯时,时序参数必须配置为满足 I2C 规范的要求;这将取决于所支持的模式和 LPI2C 功能时钟频率。以下表格提供了不同模式下寄存器时序配置示例:
表1 寄存器时序配置
LPI2C主从通讯实例
1. 配置LPI2C时钟
CLOCK_DRV_Init(&clockMan1_InitConfig0);
其中“clockMan1_InitConfig0”中包含对SIRC、FIRC、SOSC、PLL、以及LPI2C外设(在peripheralClockConfig0结构体内)的时钟配置。
peripheral_clock_config_t peripheralClockConfig0[NUM_OF_PERIPHERAL_CLO CKS_0] = {
...
{
.clockName = LPI2C1_CLK,
.clkGate = true,
.clkSrc=CLK_SRC_SIRC_DIV2,//LPI2C的时钟选择:SOSC/SIRC/FIRC/SPLL
.frac = MULTIPLY_BY_ONE,
.divider = DIVIDE_BY_ONE,
},
...
}
2. 配置LPI2C 引脚
PINS_DRV_Init(NUM_OF_CONFIGURED_PINS0, g_pin_mux_InitConfigArr0);
其中“g_pin_mux_InitConfigArr0”内对LPI2C引脚进行配置:
pin_settings_config_t g_pin_mux_InitConfigArr0[NUM_OF_CONFIGURED_PINS0] = {
...
{//LPI2C SDA引脚设置
.base = PORTC,
.pinPortIdx = 31U,
.pullConfig = PORT_INTERNAL_PULL_UP_ENABLED,
.driveSelect = PORT_LOW_DRIVE_STRENGTH,
.passiveFilter = false,
.mux = PORT_MUX_ALT4,
.pinLock = false,
.intConfig = PORT_DMA_INT_DISABLED,
.clearIntFlag = false,
.gpioBase = NULL,
.digitalFilter = false,
},
{//LPI2C SCK引脚设置
.base = PORTE,
.pinPortIdx = 1U,
.pullConfig = PORT_INTERNAL_PULL_UP_ENABLED,
.driveSelect = PORT_LOW_DRIVE_STRENGTH,
.passiveFilter = false,
.mux = PORT_MUX_ALT4,
.pinLock = false,
.intConfig = PORT_DMA_INT_DISABLED,
.clearIntFlag = false,
.gpioBase = NULL,
.digitalFilter = false,
},
...
}
下表显示了LPI2C0、LPI2C1的PIN脚在MCU中的资源分配:
表2 LPI2C0外设引脚复用
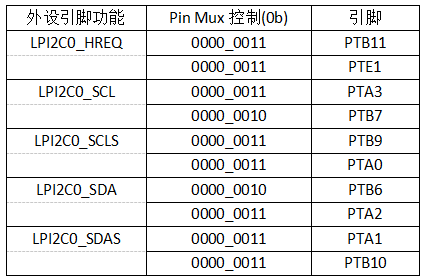
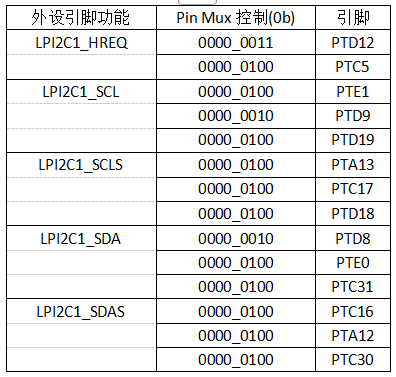
表3 LPI2C1外设引脚复用
3. LPI2C作为主机收发数据
LPI2C作为主机FAST模式400K速率配置从机地址50,设置参数如下:
lpi2c_master_user_config_t lpi2c1_MasterConfig0 = {
.slaveAddress = 50U,//地址配置
.is10bitAddr = false,//十位地址配置
.operatingMode = LPI2C_FAST_MODE,//模式配置
.baudRate = 400000UL,//波特率设置
.transferType = LPI2C_USING_INTERRUPTS,//传输方式
.dmaChannel = 0U,//若使能了DMA,则DMA设置的通道
.masterCallback = NULL,//中断函数
.callbackParam = NULL
};
LPI2C_DRV_MasterInit(INST_LPI2C1,&lpi2c1_MasterConfig0,&lpi2c1MasterState);//LPI2C作为主机初始化
LPI2C_DRV_MasterSendDataBlocking(INST_LPI2C1, masterTxBuffer, BUFF_SIZE, true, OSIF_WAIT_FOREVER);//LPI2C作为主机发送数据
while(!((LPI2C1->MSR)&LPI2C_MSR_SDF_MASK))//停止位检测
{
LPI2C_DRV_MasterReceiveDataBlocking(INST_LPI2C1,masterRxBuffer, BUFF_SIZE, true, OSIF_WAIT_FOREVER);//LPI2C作为主机接收数据
}
1. LPI2C作为从机收发数据
LPI2C作为从机,地址设置50,配置中断接收,设置参数如下:
lpi2c_slave_user_config_t lpi2c1_SlaveConfig0 = {
.slaveAddress = 50U,//从机地址
.is10bitAddr = false,//十位地址配置
.operatingMode = LPI2C_FAST_MODE,//模式配置
.slaveListening = true,//监听模式
.transferType = LPI2C_USING_INTERRUPTS,//中断传输
.dmaChannel = 0U,//若配置了DMA,则从机DMA的通道
.slaveCallback = lpi2c1_SlaveCallback0,//从机中断函数
.callbackParam = NULL
};
LPI2C_DRV_SlaveInit(INST_LPI2C1, &lpi2c1_SlaveConfig0, &lpi2c1SlaveState);//从机初始化
中断内进行数据收发:
void lpi2c1_SlaveCallback0(i2c_slave_event_t slaveEvent,void *userData)
{
uint32_t instance;
instance = (uint32_t)userData;
switch(slaveEvent)
{
case I2C_SLAVE_EVENT_RX_REQ://从机接收数据
LPI2C_DRV_SlaveSetRxBuffer(instance,slaveRxBuffer, BUFF_SIZE);
break;
case I2C_SLAVE_EVENT_TX_REQ://从机发送数据
LPI2C_DRV_SlaveSetTxBuffer(instance, slaveTxBuffer, BUFF_SIZE);
break;
case I2C_SLAVE_EVENT_TX_EMPTY://发送完成
case I2C_SLAVE_EVENT_RX_FULL://接收完成
break;
case I2C_SLAVE_EVENT_STOP:
SendOK = true;
break;
}
}
至此,LPI2C模块简单的主机从机特性及主机从机传输机制讲述完毕。
-
微控制器
+关注
关注
48文章
7960浏览量
155539 -
mcu
+关注
关注
146文章
18001浏览量
368014 -
接口
+关注
关注
33文章
9019浏览量
153831 -
fifo
+关注
关注
3文章
402浏览量
44848
原文标题:MCU微课堂|CKS32K148 LPI2C
文章出处:【微信号:中科芯MCU,微信公众号:中科芯MCU】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
中科芯CKS32F030K6T6 高性能32位RISC内核MCU 程序兼容STM32F030K6T6
请问如何在RTD5.0中设置S32K312的Lpi2c速度?
FRDM-MCXN947在初始化lpI2C时, I2C无法正常工作怎么解决?
LPI2C如何在tx fifo计数为0时继续发送时钟?
如果LPI2C可以低功耗运行,怎么知道LPI2C运行在stop模式?
如何使用lpi2c0_SlaveCallback0函数?
请问S32K148 LPI2C主控如何支持时钟延展功能?
imxrt1052使用LPI2C_MasterTransferNonBlocking API时的i2c传输模式卡在irq_callback中怎么解决?
S32K148微控制器是否支持带PHY的MII模式?
有没有办法配置lpi2c来嗅探总线并将所有数据存储在缓冲区中?
为什么无法在LPI2C4上发送数据?
S32K148如何计算微控制器最坏情况下的电流消耗?
昂科烧录器支持CETC中科芯的32位微控制器CKS32F051K8U






 工商网监
工商网监
评论