 清华大学:鲨鱼与鳄鱼皮肤启发的高性能压力传感
清华大学:鲨鱼与鳄鱼皮肤启发的高性能压力传感

随着柔性电子、可穿戴设备、医疗监测和机器人技术的快速发展,对柔性压力传感器的需求不断增加,且性能要求愈发严苛。在众多压力传感器工作机制中,电阻式压力传感器因其高灵敏度、简单结构、稳定信号和易制造而备受青睐。相关研究表明,采用微结构设计(如金字塔、圆柱和圆锥形状)可有效优化传感器性能。自然界中许多生物进化出了高效的压感机制,为传感器设计提供了宝贵灵感。例如,荷叶、玫瑰花瓣、青蛙皮肤和蟑螂触角等表面结构展现出优异的压感能力。然而,现有基于单微结构的传感器往往仅在特定压力范围内表现出优势,难以在宽压力范围内平衡高灵敏度与强压力抗性。
【方法与实验】
1.仿生结构灵感来源
鲨鱼皮肤的微观脊状鳞片结构和鳄鱼皮肤的宏观多级穹顶结构分别为传感器提供了微米级和毫米级的结构设计灵感。鱼鲨皮肤结构有助于在低压下快速增加摩擦和接触点,提高灵敏度。鳄鱼皮肤结构则有助于均匀分布压力,增强稳定性和抗过载能力。
2.传感器设计与制备
研究团队提出了跨尺度互补复合柔性压力传感器组合策略,开发了三种生物启发式传感器架构:鲨鱼-鲨鱼(S-S)、鳄鱼-鳄鱼(C-C)和鳄鱼-鲨鱼(C-S)。使用聚二甲基硅氧烷(PDMS)作为柔性基底,石墨烯作为敏感材料,通过微压印技术制造仿生微结构表面。通过实验测试了三种组合模式传感器(S-S、C-C、C-S)的性能,重点评估了灵敏度、工作范围、稳定性和动态响应等关键指标。灵敏度定义为传感器相对电阻变化与所施压力的比值。
【性能与机制】
1.仿生传感器性能
S-S传感器:利用微尺度脊状鳞片结构,在低压范围(0–2.5 kPa)实现了32 kPa-1的 exceptional 灵敏度,适用于高精度应用如声学监测。其在低压力下表现出快速的相对电阻变化增加,在0–2.5 kPa的线性范围内灵敏度达到32 kPa-1,但在5 kPa以上电阻变化趋于饱和。
C-C传感器:采用毫米尺度的多级穹顶结构,在约100 kPa的高压下实现稳定变形和信号输出,适用于步态分析等场景。在0–20 kPa压力范围内,灵敏度为5.86 kPa-1;在20–30 kPa范围内,灵敏度降至0.90 kPa-1;在30–100 kPa线性范围内,灵敏度为0.30 kPa-1。
C-S传感器:通过协同整合两种生物结构,提供了从1 Pa–80 kPa的宽工作范围、高灵敏度(18.2 kPa-1)、出色稳定性(20 000次循环)和快速动态响应(21/28毫秒响应/恢复时间)。其在0–10 kPa范围内灵敏度为18.20 kPa-1,在10–40 kPa范围内灵敏度为1.10 kPa-1,在40–80 kPa范围内灵敏度为0.12 kPa-1。
2.C-S传感器机制分析
跨尺度互补复合传感器C-S的电阻变化主要源于压力引起的上下石墨烯敏感层间接触面积变化,进而改变石墨烯导电通路数量。C-S器件在不同压力阶段的变形特性可分为三个阶段,对应于鲨鱼皮肤和鳄鱼皮肤启发的层级结构在跨尺度互补复合压力传感器中的三段式线性响应:
(1)低压阶段(0–10 kPa):鲨鱼皮肤的微脊和鳞片结构首先发生明显弹性变形,形成离散的微点接触,显著提高单位压力下接触电阻变化率,赋予传感器超高初始灵敏度。
(2)中压阶段(10–40 kPa):随着压力增加,鲨鱼皮肤微结构变形逐渐饱和,接触点开始合并形成接触面。同时,鳄鱼皮肤的多级穹顶结构参与变形,产生新接触点。此阶段呈现出点接触和面接触的协同效应。
(3)高压阶段(40–80 kPa):鲨鱼皮肤微结构几乎失去变形能力,鳄鱼皮肤的多级穹顶结构主导传感器变形,将接触界面转变为以面接触为主的模式。由于其结构特点,层级穹顶结构能持续变形而不立即饱和,尽管灵敏度降低,但传感器展现出优异的抗过载能力。
【应用场景与优势】
1.S-S传感器
凭借其在低压范围的卓越灵敏度,适用于极低压下的高精度应用,如声音/语音监测。例如,通过将S-S柔性压力传感器附着在扬声器的振膜上,可捕捉细微压力变化并转换为可识别的电信号,实现高精度声音信号监测和分析。还可附着在喉咙监测声带振动,实现语音信号的精准捕捉和分析。
2.C-C传感器
在高压环境下表现出色,能在高压力下保持稳定检测,适用于步态监测等场景。例如,部署在前脚区域用于系统性足底压力检测,能清晰区分不同活动状态下的信号特征和幅度。
3.C-S传感器
作为可穿戴设备,能精确监测从细微生理活动到大幅度人体运动的各种活动,显著提升了运动和健康监测的全面性。例如,附着在桡动脉时可准确检测脉搏波形,附着在面具上可检测正常呼气,在手腕、肩部和肘部等关节处能精确监测运动变化。在自适应机器人抓取领域,C-S传感器通过结合鲨鱼皮肤启发的微结构的高灵敏度和鳄鱼皮肤启发的宏结构的强大压力承受能力,展示了在模仿人类抓取和触觉感知方面的巨大应用潜力。
【图文导读】
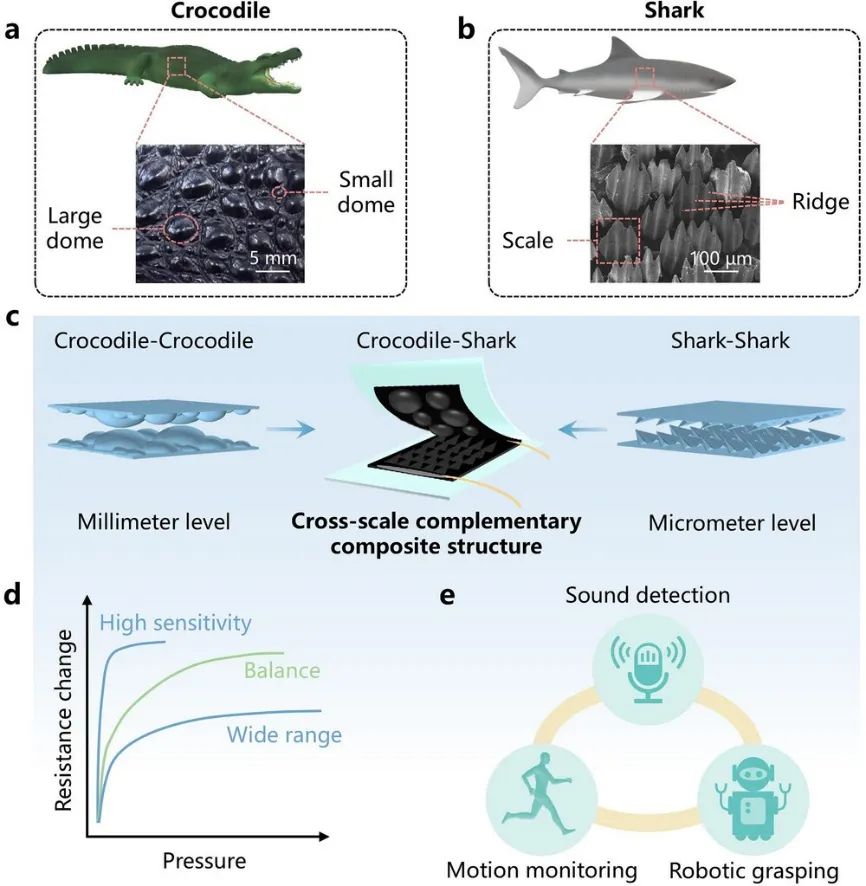
图1.压力传感器的设计概念。a)鳄鱼皮表面显微结构图像。B)鲨鱼皮表面显微结构图像 c)结合鳄鱼皮的多层圆顶结构和鲨鱼皮的脊状鳞片结构的复合压力传感器。d)基于鳄鱼-鳄鱼、鲨鱼-鲨鱼和鳄鱼-鲨鱼结构的传感器的性能比较。d)基于鳄鱼-鳄鱼、鲨鱼-鲨鱼和鳄鱼-鲨鱼结构的传感器的性能比较。
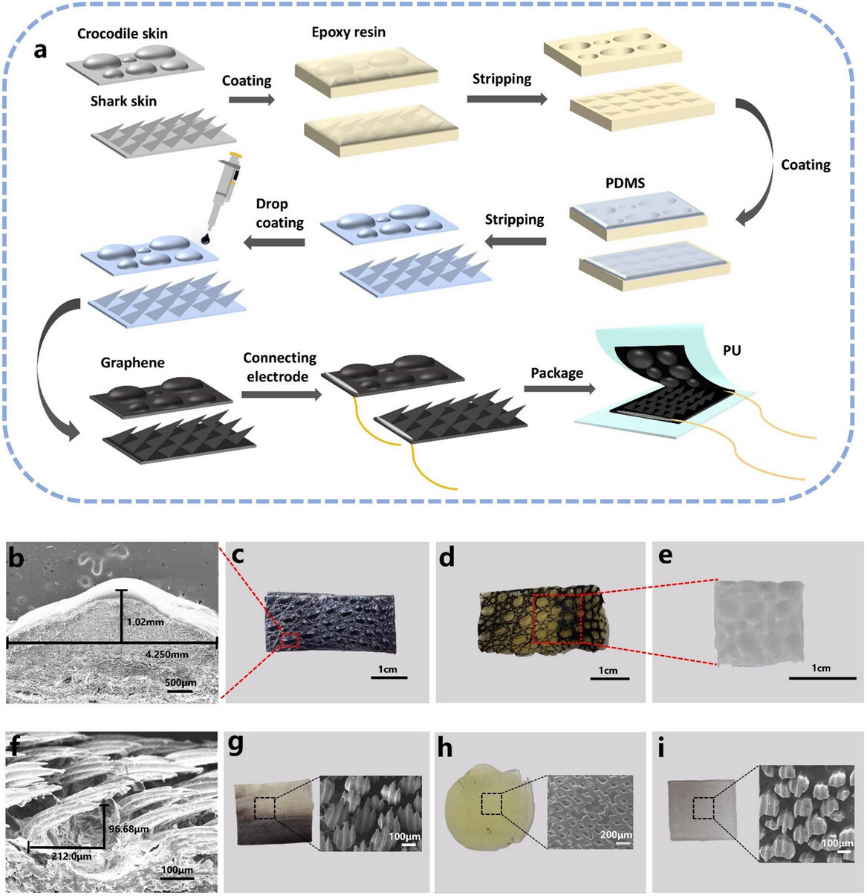
图2.跨尺度互补复合柔性压力传感器的制造和表征。a)传感器制造流程图。b)鳄鱼皮的横截面SEM表征。c)真实的鳄鱼皮。d)鳄鱼皮表面的负模板。e)具有鳄鱼皮表面结构的柔性基底。f)鲨鱼皮的横截面SEM表征。g)真实的鲨鱼皮。h)鲨鱼皮表面负模板。i)具有鲨鱼皮表面结构的柔性基底。
图3.三种传感器组合模式(S-S、C-C、C-S)的特性和性能。a)鲨鱼皮和鳄鱼皮的表面结构示意图。B)仿生结构中灵敏度与压力关系示意图。c)负载条件下鲨鱼脊状鳞片结构的有限元模型。d)鳄鱼多级穹顶结构在载荷条件下的有限元模型。e)S-S组合的阻力相对于负载压力的相对变化。f)C-C组合的电阻相对于负载压力的相对变化。f)C-C组合的电阻相对于负载压力的相对变化。h)平面-平面组合的阻力相对于载荷压力的相对变化。i)三种组合模式传感器的性能比较。j)三种组合模式传感器与先前报道的传感器的灵敏度和压力检测范围的比较。S-S:鲨鱼鲨鱼,C-C:鳄鱼鳄鱼,C-S:鳄鱼鲨鱼。
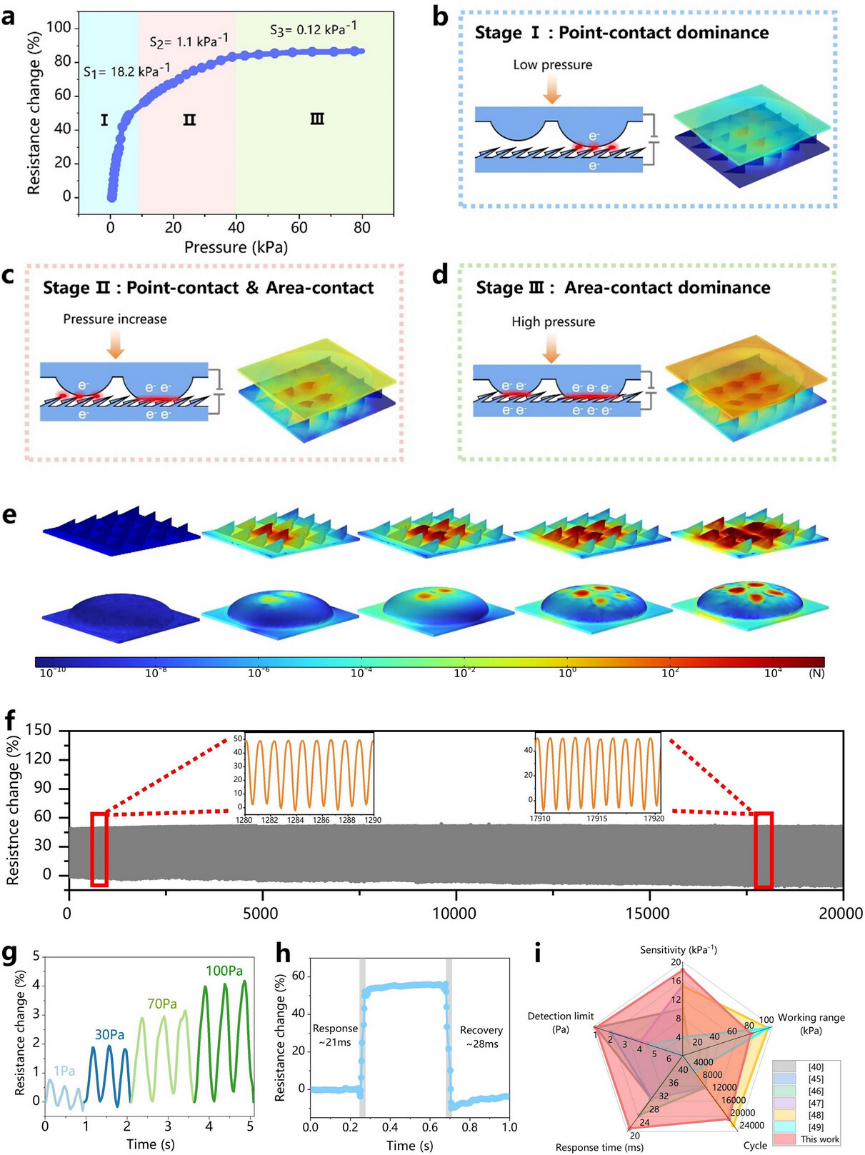
图4.跨尺度互补复合柔性压力传感器的性能。a)C-S组合线性变化的三个阶段。b)-d)三级线性响应的器件图和有限元模拟。e)小尺度、鳞片状结构层与大尺度穹隆结构层相互作用过程中的转化过程。f)超过20000个加载-卸载压力循环的稳定性测试。g)微压测试。h)响应和恢复时间测试。i)跨尺度互补复合柔性压力传感器与其他传感器的综合性能比较。
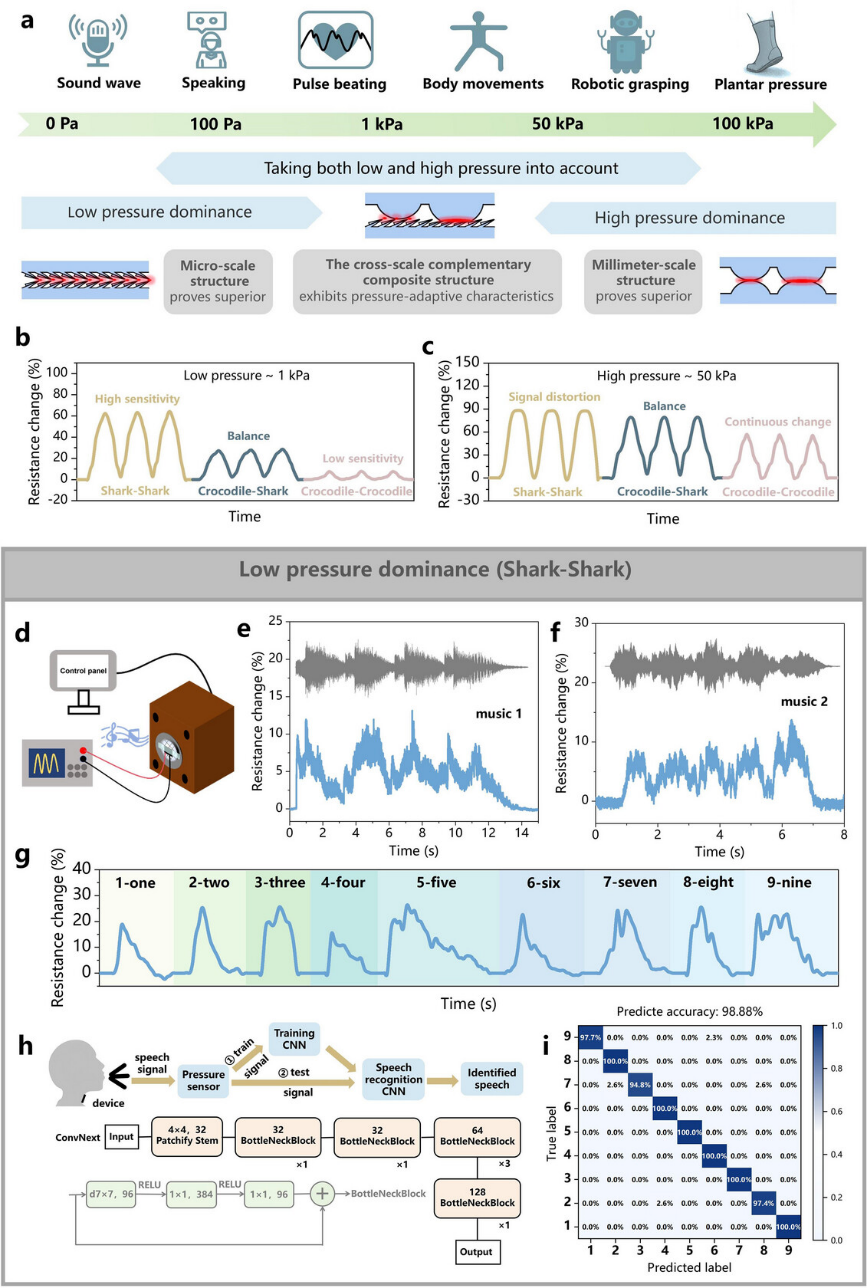
图5.跨尺度互补复合柔性压力传感器组合策略和声学测试示意图。a)基于跨尺度互补复合策略的应用设计示意图。b)基于跨尺度互补复合策略的应用设计示意图。c)高压条件下三种配置方式的性能对比分析。d)声音测试示意图。e)第一音乐片段测试期间的电阻变化响应。f)第二音乐片段测试期间的电阻变化响应。g)对不同的“1-9”数字词发音的抗性反应。h)使用CNN-ConvNeXt网络架构的不同音调的说话测试和信号评估。
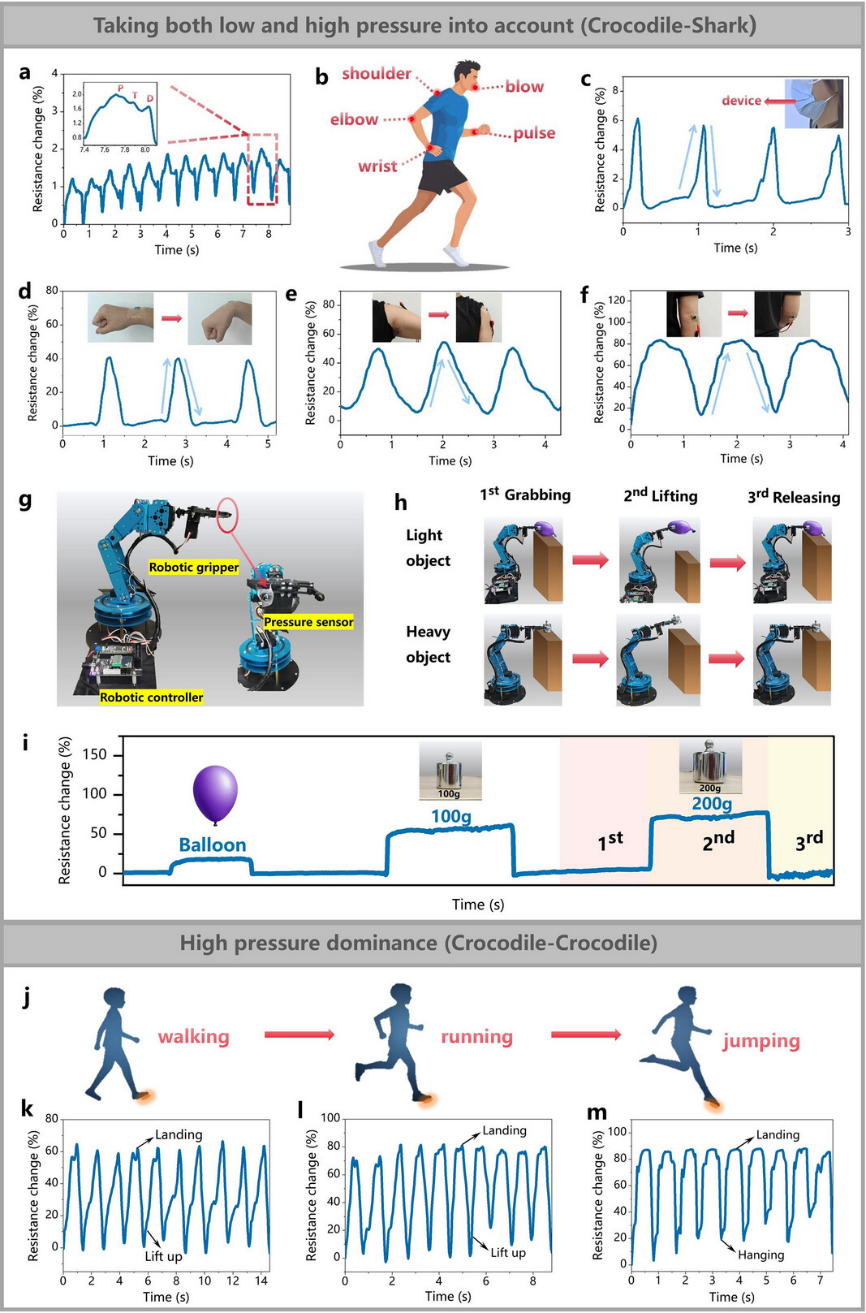
图6.可穿戴和机器人自适应抓取应用。a)腕部脉搏信号监测。B)跨尺度互补复合柔性传感器的可穿戴应用示意图。c)吹气信号监测。d)手腕运动信号监测。e)肩部运动信号监测。f)肘部运动信号监测。g)机器人自适应抓取应用的系统连接图。h)抓取目标物体和操作程序。i)机器人抓取气球和标准砝码(100和200 g)。j)足底压力检测的示意图。k-m)在步行、跑步和跳跃活动期间由脚部安装的传感器记录的实时压力响应信号。
原文链接:
https://doi.org/10.1002/adfm.202510130
-
压力传感
+关注
关注
0文章
36浏览量
17786 -
柔性电子
+关注
关注
5文章
184浏览量
16294 -
可穿戴医疗
+关注
关注
7文章
83浏览量
27891
发布评论请先 登录
清华大学TOP EE+项目参访美光上海
清华大学携手华为打造业内首个园区网络智能体
2025年开放原子校源行清华大学站成功举办
奇瑞汽车携手清华大学发布“分体式飞行汽车”专利
清华大学鲲鹏昇腾科教创新卓越中心专项合作启动,引领高校科研和人才培养新模式
清华大学与华为启动“卓越中心”专项合作
清华大学:软体机器人柔性传感技术最新研究进展

清华大学DeepSeek指南:从入门到精通
博世与清华大学续签人工智能研究合作协议
京微齐力受邀参加2024年清华大学工程博士论坛
英诺达与清华大学携手,共促国产EDA进步
清华新力量,沪上芯征程!清华大学上海校友会半导体专委会2024思瑞浦迎新日

清华大学:软体机器人柔性传感技术最新研究进展

热烈欢迎清华大学电子工程系学子来武汉六博光电交流实践!





 工商网监
工商网监
评论