 ADIS16060宽带宽偏航角速度陀螺仪,采用SPI接口技术手册
ADIS16060宽带宽偏航角速度陀螺仪,采用SPI接口技术手册

概述
ADIS16060是一款偏航角速度陀螺仪,采用集成式串行外设接口(SPI),具有可从外部选择的带宽响应和可调整动态范围。
通过SPI端口可以访问偏航角速度传感器、内部温度传感器以及两个外部模拟信号(使用内部ADC)。SPI端口提供的数字数据与围绕封装上表面垂直轴转动的角速率成比例。
附加输出引脚可提供精密的基准电压 。 数字自测功能通过机电方式激励传感器 , 以测试传感器和信号调理电路的工作情况。
ADIS16060提供8.2 mm × 8.2 mm × 5.2 mm、16引脚外围基板栅格阵列(LGA)封装。
数据表:*附件:ADIS16060宽带宽偏航角速度陀螺仪,采用SPI接口技术手册.pdf
应用
- 平台稳定
- 图像稳定
- 制导与控制
- 惯性测量单元
- 机器人
特性
- 完整的角速度数字陀螺仪14位分辨率
- 初始范围:±80°/秒(典型值)可利用外部电阻增大范围
- Z轴(偏航角速度)响应
- SPI 数字输出接口
- 可在宽频率范围内提供高振动抑制特性
- 5 V 单电源供电
- 8.2 mm × 8.2 mm × 5.2 mm 封装
- 抗冲击能力:2000 g
- 带宽:1 kHz
- 外部控制的自测功能
- 内部温度传感器输出
- 双路辅助14位ADC输入
- 绝对速率输出,适合精密应用
- 符合RoHS标准
- 工作温度:?40°C至+105°C
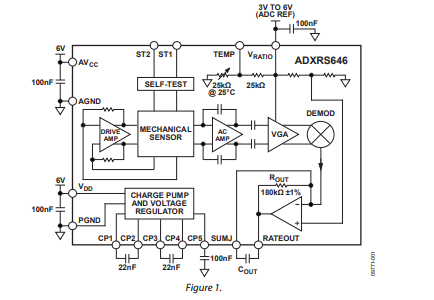
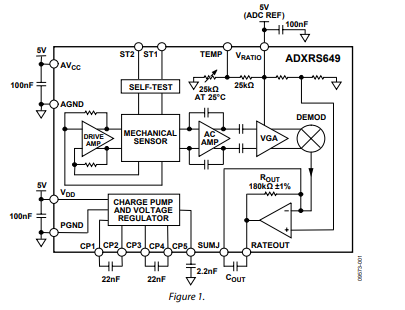
框图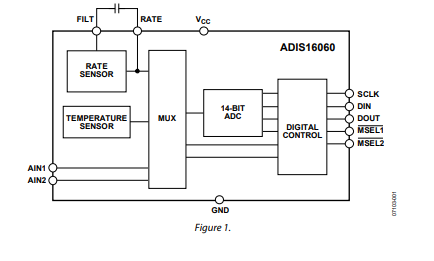
时序图
引脚配置描述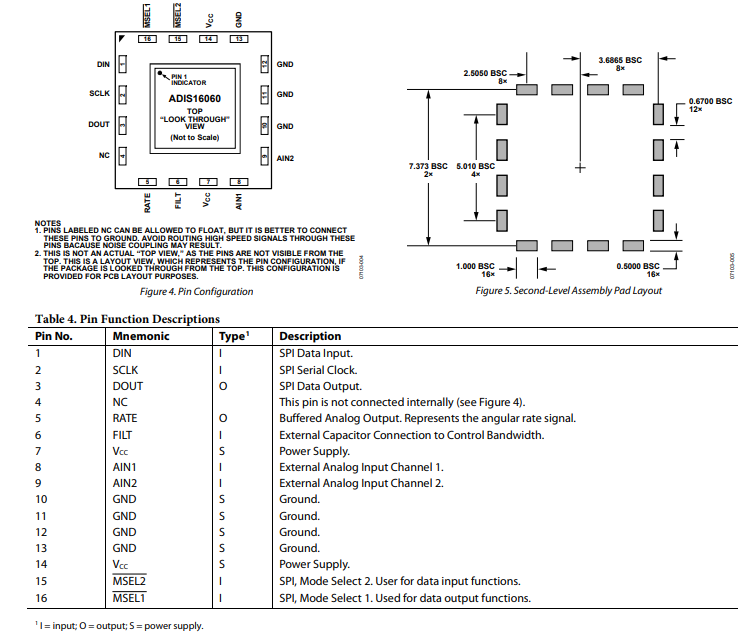
典型性能特征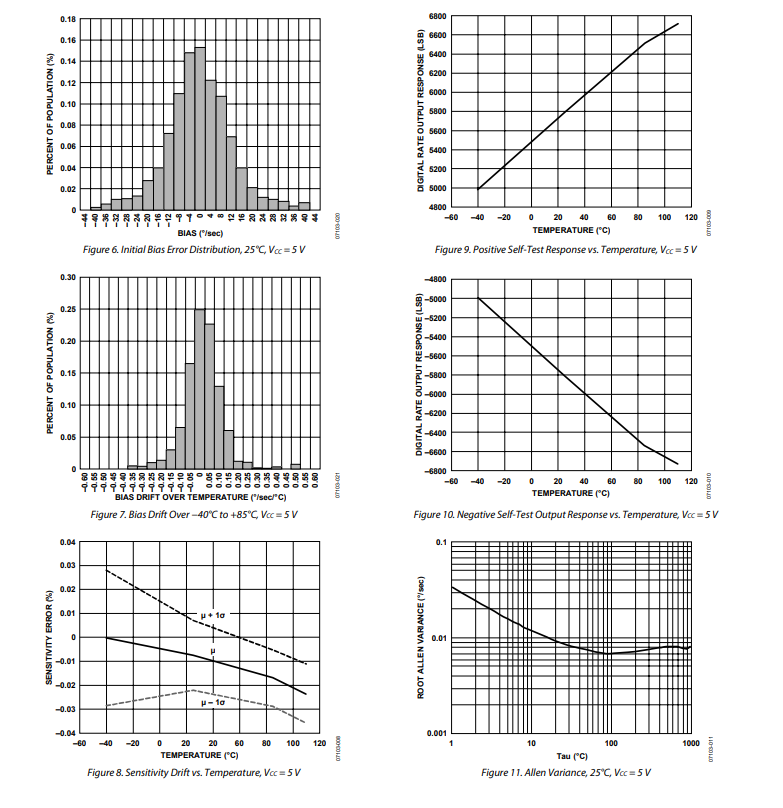
ADIS16060基于谐振陀螺仪原理工作。两个多晶硅传感结构中,每个都包含一个抖动框架,该框架通过静电驱动至谐振状态,产生必要的速度分量,以便在旋转时生成科里奥利力。在抖动框架的两个正交端,有可移动指状结构置于固定拾取指状结构之间,形成一个电容式拾取结构,用于感测科里奥利运动。
产生的信号会传输至一系列增益和解调级,以产生电角速率输出。角速率信号随后被转换为数字表示形式,并在SPI引脚上输出。双传感器设计可抑制线性加速度(振动、震动)。带有信号调理电路的封装能在噪声环境中保持信号完整性。
静电谐振器工作需要14V至16V电压。由于大多数应用通常仅提供5V电压,所以内置了一个电荷泵。在解调级之后,有一个单极点低通滤波器,用于在最终放大之前限制频率杂散。通过在RATE和FILT之间增加电容来设置频率响应,这主要由单极点低通滤波器决定。
模数转换器输入
图12展示了ADIS16060辅助ADC的等效模拟输入电路结构。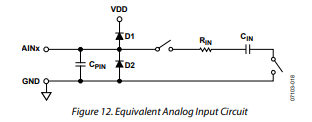
两个二极管D1和D2为模拟输入AINx(AIN1和AIN2)提供静电放电保护。必须注意确保模拟输入信号不超过电源轨0.3V以上,因为超过此电平会使这些二极管正向偏置并开始导通电流。不过,这些二极管能够处理最大130mA的正向偏置电流。例如,当输入信号超过VCC或GND时,最终可能会出现这种情况。
在采集阶段,AlNx的阻抗模型是电容C_{PIN} 与由R_{IN} 和C_{IN} 串联构成的网络的并联组合。C_{PIN} 主要是引脚电容。R_{IN} 通常为600Ω ,是由一些串联电阻和开关电阻组成的组合,C_{IN} 通常为30pF ,主要用作ADC采样电容。
在转换阶段,当开关打开时,输入阻抗仅限于C_{PIN} 。R_{IN} 和C_{IN} 构成一个单极点低通滤波器,可减少不需要的混叠效应并限制噪声。
当驱动电路的源阻抗较低时,ADC输入可以直接驱动。较大的源阻抗会显著影响交流性能,尤其是总谐波失真(THD)。直流性能对输入阻抗不太敏感。
速率敏感轴
速率信号随顺时针旋转而增加,如图13所示。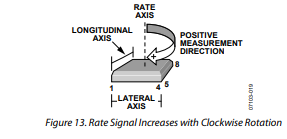
-
陀螺仪
+关注
关注
44文章
852浏览量
100176 -
SPI
+关注
关注
17文章
1806浏览量
96346 -
速度传感器
+关注
关注
2文章
133浏览量
19327
发布评论请先 登录
请问ADIS16300中的单轴陀螺仪可以垂直放置使用吗?
请问ADIS16300中的单轴陀螺仪可以垂直放置使用么?

ADIS16060 宽带宽偏航角速度陀螺仪,采用SPI接口
ADIS16080 ±80°/秒偏航角速度陀螺仪,采用SPI接口

陀螺仪三轴角速度转姿态角速度
ADXRS646具有高稳定性、低噪声和振动抑制特性的偏航角速度陀螺仪技术手册
ADXRS649快速启动、具有振动抑制特性的±20,000°/s偏航角速度陀螺仪技术手册





 工商网监
工商网监
评论