 智元机器人押注,上海传感器公司千觉机器人又获数千万元融资
智元机器人押注,上海传感器公司千觉机器人又获数千万元融资

近日,千觉机器人科技 (上海) 有限公司(下文简称“千觉机器人”)官宣完成数千万元融资,最新一轮由元禾原点、戈壁创投、小苗朗程投资,资金将用于技术研发投入和产品迭代、加快量产交付速度。
千觉机器人是一家多模态触觉感知传感器公司,于2024年5月刚刚成立,总部位于上海,专注于研发面向机器人精细操作的多模态触觉感知与智能技术。
2024年10月份千觉机器人完成了高瓴创投(GL Ventures),璞跃中国(Plug and Play China)领投的数千万元天使轮融资。2025年2月,该公司又完成了天使+轮融资,投资人为智元机器人,但此前并未官宣,直至今日正式公布。
值得一提的是,千觉机器人是智元机器人继“数字华夏”“灵初智能”之后,投资的第三家具身智能初创企业。
数据显示,目前高瓴持有千觉机器人约3.64%股权,智元机器人持有约1.45%股权。千觉机器人的视触觉传感器方案已在智元机器人落地。

千觉机器人创始人是马道林,马道林持有千觉机器人52.5%的股份,是实际控制人。
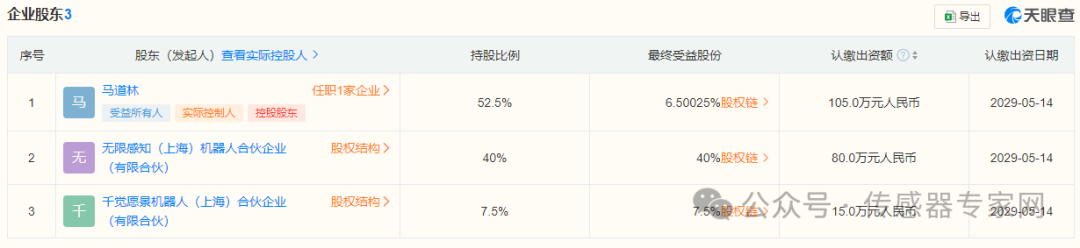
马道林被业内认为是目前触觉感知领域技术能力最为突出的科学家之一。马道林于2009年毕业于北京大学理论与应用力学专业,并于2015年取得北京大学博士学位。2016年,他进入MIT Mcube 实验室从事博士后研究,随后一直致力于机器人操作及触觉感知领域的前沿研究。 事实上,在视触觉领域,全球顶尖人才主要来自于MIT研发Gelsight/Gelslim的两个实验室,而马道林是其中为数不多的回国创业者。
▲马道林 2021年,马道林加入上海交通大学船舶海洋与建筑工程学院担任长聘教轨副教授,并创建了操作感知与智能实验室。 在触觉感知领域的研究中,马道林在全球范围内首次提出了“依靠触觉和接触来构建空间感知”的机器人精细化操作新路径,2021年,他的研究成果《基于分布式触觉测量和相对运动跟踪的外部接触感知》(Extrinsic Contact Sensing with Relative-Motion Tracking from Distributed Tactile Measurements)在机器人领域最具影响力的国际会议ICRA中获得了大会最高荣誉,斩获2021 ICRA最佳会议论文奖。

ICRA是学术界公认的机器人与自动化领域的顶级盛会,全称IEEE International Conference on Robotics and Automation。自1984年开始举办,每年一次,会议开设了最佳论文奖、最佳学生论文奖,以及自动化、人机交互、多机器人系统、机器人视觉等子领域最佳论文奖等 12 个奖项。 对于该论文,ICRA评委会给出了高度赞誉: “The paper makes a notable contribution to the important and re-emerging field of tactile perception by solving the problem of contact localization between an unknown object held by an imprecise grasp and the unknown environment with which it is in contact. This paper represents an excellent theory-to-practice exercise as the novel proposal of using extrinsic tactile array data to infer contact is verified with a new tactile sensor and real robotic manipulation in a simplified, but realistic environment. The authors also provide a robust and honest discussion of results, both positive and negative, for reader evaluation.”(该论文通过解决不精确抓取的未知物体与其接触的未知环境之间的接触定位问题,为触觉感知这一重要且重新出现的领域做出了显着贡献。本文代表了一次出色的理论到实践的实践,因为使用外在触觉阵列数据来推断接触的新颖提议已通过新的触觉传感器和在简化但现实的环境中的真实机器人操作进行了验证。作者还对结果进行了有力而真诚的讨论,包括正面和负面的,供读者评估。)
以下为国外媒体对该论文的解读: 作为三维接触力场重建的关键学者,在触觉感知领域,马道林首次实现了对被抓取物体基于触觉的高精度运动跟踪,并基于运动跟踪的能力,创新性地提出了“外部接触感知”理论框架,打开了触觉感知的新模态,使机器人在操作物体时能够依靠触觉同步感知“力”和“运动”两大核心要素,为智能机器人进一步在灵巧操作中精确控制接触行为铺平了道路。 随着人形机器人产业布局与发展的提速,触觉感知正在成为人形机器人企业角逐的关键技术。针对传统触觉传感器仅能感受压力分布以及空间分辨率不足的问题,千觉机器人自主研发的触觉传感器可提供包括高分辨率三维力觉、动觉、滑觉等在内的多模态触觉感知信息,为新一代人形机器人与物理环境自主交互提供了全新的触觉感知能力,帮助机器人突破灵巧操作的瓶颈。目前,千觉机器人相关产品包括高分辨率多模态触觉传感器、触觉感知与控制智能化模组等。
「千觉机器人」成立于2024年5月,专注研发面向机器人精细操作的多模态触觉感知与操作技术,核心产品包括高分辨率多模态触觉传感器、触觉感知与控制智能化模组等。创始人马道林为上海交大副教授,在触觉传感器领域,他提出了「依靠触觉和接触来构建空间感知」的机器人操作路径,首次基于触觉实现对被抓取物体的高精度运动跟踪。
在复杂环境下,单纯依赖视觉传感的方案面临诸多挑战,受光照强度变化、物体遮挡及透视变形等因素,这些因素都可能导致其信息感知出现失真现象。对比之下,触觉方案可以有效克服上述局限,在具身智能研究中逐渐展现出独特优势。
触觉传感器能够实时感知接触力的分布与大小,并提供高精度、高时效性的反馈数据。基于这些触觉反馈,机器人灵巧手可动态调整操作策略,包括自适应调节抓取力度、优化手指姿态、调整运动轨迹等,从而提高操作的稳定性和精准度,确保任务的高效执行。
在处理柔软、易碎或形状不规则的物体时,触觉传感器使机器人能够精确感知物体的材质特性与轮廓信息。
例如,在试管搬运与操作过程中,触觉传感器可帮助机器人实时感知试管的光滑度与脆性,并监测其中液体的动态变化。在此基础上,机器人能够精准调节抓取力度,优化握持姿态,并在液体混合或转移过程中控制晃动幅度,从而降低试管破损与液体溢出的风险,确保操作的稳定性与安全性。这一能力显著提升了机器人在精细操作场景中的适应性。
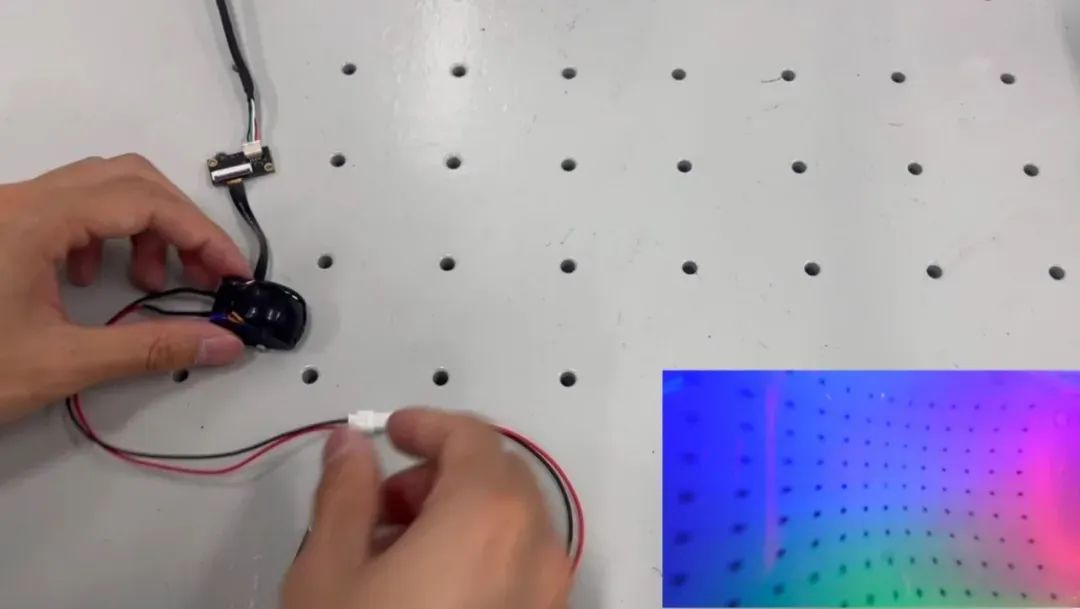
在硬件端,「千觉机器人」自研多模态高精度触觉传感器G1-WS,这款传感器是专为机器人夹爪设计,可以提供多模态、高分辨率的触觉信息,信息感受密度高达人类手指的800倍,能够感知到细微的物体特征和变形,为机器人精细操作提供高精度触觉反馈。
以智元机器人AgiBot World数据采集任务为例。让机器人进行电脑主机装内存条的任务,需要其具备亚毫米级精细控制能力,以避免造成设备损坏。其中,G1-WS能够精准感知包括三维形状、三维力分布以及六维合力等多种信息,测量分辨率精度达到每平方厘米5万个测量点,X/Y方向轴精度为0.03毫米,Z方向轴精度为0.06毫米,在保证超高分辨率与精度的同时,每帧深度场的处理时间仅需10毫秒。
这相当于为机器人装置了一个「指尖神经」,可提供如神经纤维般灵敏的末端触觉,实现精准对接。

高精度触觉感知算法在机器人精细装配上测试(图源/千觉机器人)
同时,G1-WS在结构上采用楔形结构,前端更加细窄,可用于应对狭窄区域的复杂工况,前端最薄处仅5毫米。这意味着,G1-WS可以轻松进入任何人类手指能够触及的地方,提供灵活精确的感知能力,以解决复杂的装配任务和狭小空间中的精密操作。
长期以来,由于采集成本高,高质量触觉数据稀缺成为机器人触觉控制算法训练的关键瓶颈,基于仿真的合成数据是应对这一挑战的关键一环。
日前「千觉机器人」也发布全球首个触觉仿真工具Xense_Sim,能精准模拟切向运动与力信息,解决了此前切向力模拟技术空白的问题,仿真数据更贴合拧瓶盖、插拔接口等真实操作场景,有助于提升训练模型的泛化能力。
实测数据显示,Xense_Sim在效率与精度上有明显优势,在实现高精度仿真的同时,可以保持每秒50Hz的高处理速度,确保仿真精度与实时性。目前Xense_Sim已集成至Issac Sim仿真平台。
大拇指触觉传感器(图源/千觉机器人)
硬氪了解到,当前「千觉机器人」触觉仿真工具Xense_Sim及多模态高精度触觉传感器G1-WS已在智元机器人上应用,其模块化、小型化视触传感器正量产交付中,可为精密装配、工业智造及智能服务等复杂场景落地构建数据基础。
未来,双方将基于「硬件+仿真+数据」层面协同创新,共同探索机器人精细操作、复杂场景适应性及通过合成数据降低数据采集成本的新路径。
什么是视触觉传感器?
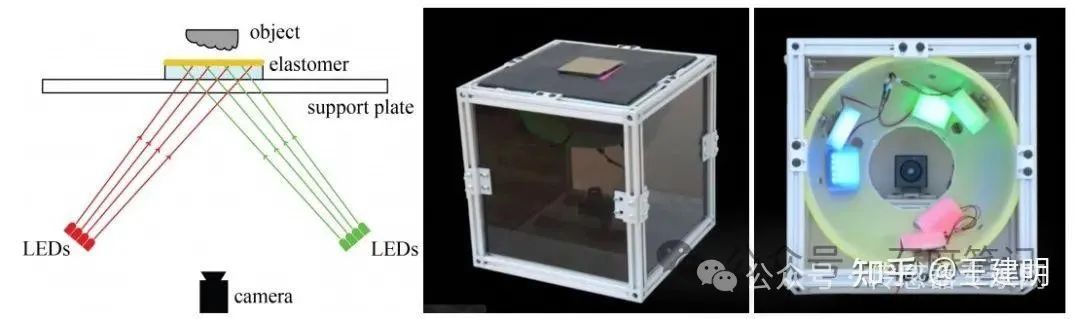
视触觉传感器顾名思义,就是基于视觉的触觉传感器。 人类在操作物体的时候,手部的触觉信息包含两个维度:物体本身的状态和接触的状态;其中物体本身的状态信息包含表面纹理、物体形状、软硬度;接触状态信息包含法向力(垂直人手皮肤)、剪切力(平行人手皮肤)、相对滑动和物体的位姿。 对上述触觉信息,大多数触觉传感器比如压阻式、压电式、电容式和电磁式大都只能感受法向力,而对其他信息无法采集或灵敏度很低。VBTS和其他触觉方案相比,最大的优点就是可以高灵敏地感知上述全部信息,非常接近人手的触觉信息维度。 基于荧光点的视触觉传感器早在2004年就由东京大学团队提出过(GelForce),但分辨率不高。 GelSight是第一个超高分辨率的视触觉传感器,它于2009年由MIT计算机科学与人工智能实验室(CSAIL)的Edward Howard Adelson(简称Edward Adelson)研究小组提出。
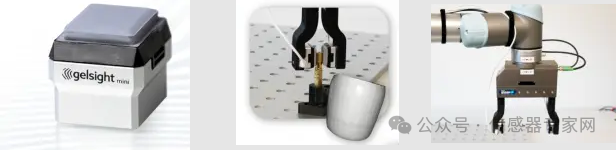
▲GelSight视触觉传感器本体和应用场景 GelSight是由“Gel”和“Sight”组成,Gel(凝胶)是传感器弹性接触表面使用的材料;Sight(视觉),传感机制是使用摄像头采集视觉图像。 基本原理上,在GelSight触觉传感器接触物体时,内置的摄像头在LED灯光的辅助下捕捉接触物体的凝胶产生的形变,通过计算机视觉的算法将凝胶形变信息与触觉信息进行映射。
▲视触觉传感器结构 视触觉传感器由接触模块、照明模块、图像采集模块和信息处理模块组成。接触模块包含接触体、反射层、标记层和保护层,它是整个传感器的核心。不同的功能层则代表了不同的传感原理,比如基于膜反射和基于标记物的表征。
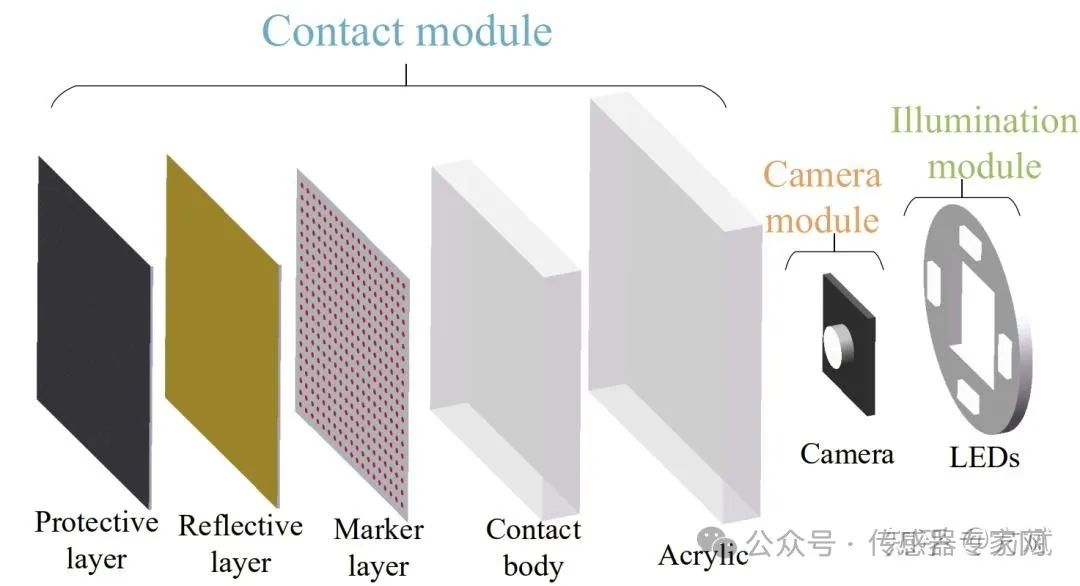
▲视触觉传感器的结构组成

▲GelSight视触觉传感器实物拆解,左图为接触模块,右图为图像采集模块及照明模块 目前,视触传感器推到了机器人触觉感知领域的最前沿,获得了全球顶尖高校和科研机构的认可和跟随,AI机器人领域的顶级高校MIT、Stanford、CMU、UCB、UIUC、ETH、牛津、清华、北大、上交、港科大、中科院等高校以及Meta、TRI(丰田)等大企业都推出过基于GelSight的各项工作。
随着人形机器人产业化浪潮,视触传感器技术也从实验室走向产业化前沿,千觉机器人、纬钛机器人、戴盟机器人等国产视触传感器技术初创企业相继成立,推动中国视触传感器的产业化发展。
-
传感器
+关注
关注
2567文章
53080浏览量
768284 -
视觉传感器
+关注
关注
3文章
268浏览量
23353 -
触觉传感器
+关注
关注
4文章
105浏览量
9738 -
智元机器人
+关注
关注
1文章
21浏览量
777 -
具身智能
+关注
关注
0文章
148浏览量
493
发布评论请先 登录
三雅科技完成数千万元A轮融资
北京机器人传感器公司金钢科技数千万元Pre-A轮融资






 工商网监
工商网监
评论