 Linux文件系统打包及镜像制作,触觉智能RK3562开发板演示
Linux文件系统打包及镜像制作,触觉智能RK3562开发板演示

本文介绍Linux开发板文件系统打包及镜像制作的方法,演示Linux文件系统打包及镜像制作,适用于想将配置好的系统环境打包成镜像批量烧录。触觉智能RK3562开发板演示,搭载4核A53处理器,主频高达2.0GHz;内置独立1Tops算力NPU,可应用于物联网网关、平板电脑、智能家居、教育电子、工业显示与控制等行业。
工具获取
本文所介绍的方法需要使用到Linux环境下的一些工具。工具可联系触觉智能客服或留言获取。下载Ubuntu PC环境后,需要解包后使用,解包方法如下:
$ tar -vxf ido-pack-tools.tar -C ./
解包后的文件内容如下:
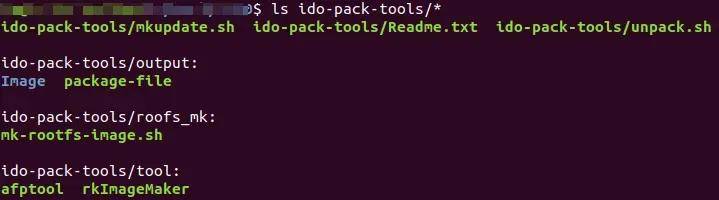
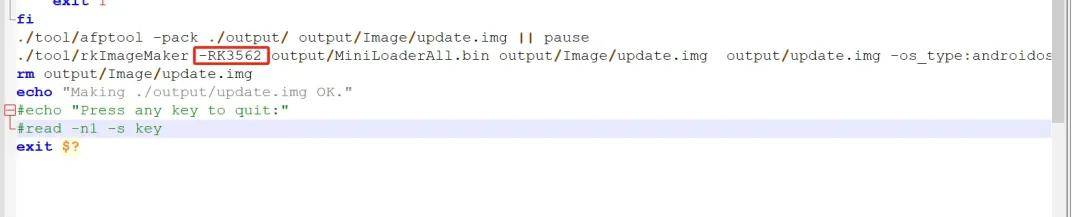
工具包脚本默认芯片信息是rk3562,如果使用其他芯片,则需要修改芯片信息,对应路径ido-pack-tools/mkupdate.sh。
文件系统打包及文件系统镜像制作
- 从开发板中打包出文件系统
先在开发板中插入U盘或TF卡,然后通过mount命令查看文件系统分区节点,如下所示:
root@ido:/# mount /dev/mmcblk2p8 on / type ext4 (rw,relatime) devtmpfs on /dev type devtmpfs (rw,relatime,size=996844k,nr_inodes=249211,mode=755) sysfs on /sys type sysfs (rw,nosuid,nodev,noexec,relatime) proc on /proc type proc (rw,nosuid,nodev,noexec,relatime) securityfs on /sys/kernel/security type securityfs (rw,nosuid,nodev,noexec,relatime) tmpfs on /dev/shm type tmpfs (rw,nosuid,nodev,size=1008396k,nr_inodes=252099) devpts on /dev/pts type devpts (rw,nosuid,noexec,relatime,gid=5,mode=620,ptmxmode=000) tmpfs on /run type tmpfs (rw,nosuid,nodev,size=201680k,nr_inodes=252099,mode=755) tmpfs on /run/lock type tmpfs (rw,nosuid,nodev,noexec,relatime,size=5120k,nr_inodes=252099) tmpfs on /sys/fs/cgroup type tmpfs (ro,nosuid,nodev,noexec,size=1008396k,nr_inodes=252099,mode=755) cgroup2 on /sys/fs/cgroup/unified type cgroup2 (rw,nosuid,nodev,noexec,relatime,nsdelegate) cgroup on /sys/fs/cgroup/systemd type cgroup (rw,nosuid,nodev,noexec,relatime,xattr,name=systemd) pstore on /sys/fs/pstore type pstore (rw,relatime) cgroup on /sys/fs/cgroup/cpu,cpuacct type cgroup (rw,nosuid,nodev,noexec,relatime,cpu,cpuacct) cgroup on /sys/fs/cgroup/cpuset type cgroup (rw,nosuid,nodev,noexec,relatime,cpuset) cgroup on /sys/fs/cgroup/devices type cgroup (rw,nosuid,nodev,noexec,relatime,devices) cgroup on /sys/fs/cgroup/freezer type cgroup (rw,nosuid,nodev,noexec,relatime,freezer) debugfs on /sys/kernel/debug type debugfs (rw,relatime) tracefs on /sys/kernel/tracing type tracefs (rw,nosuid,nodev,noexec,relatime) configfs on /sys/kernel/config type configfs (rw,nosuid,nodev,noexec,relatime) fusectl on /sys/fs/fuse/connections type fusectl (rw,nosuid,nodev,noexec,relatime) adb on /dev/usb-ffs/adb type functionfs (rw,relatime) tmpfs on /run/user/0 type tmpfs (rw,nosuid,nodev,relatime,size=201676k,nr_inodes=252099,mode=700) tmpfs on /run/user/1001 type tmpfs (rw,nosuid,nodev,relatime,size=201676k,nr_inodes=252099,mode=700,uid=1001,gid=1001) gvfsd-fuse on /run/user/1001/gvfs type fuse.gvfsd-fuse (rw,nosuid,nodev,relatime,user_id=1001,group_id=1001) /dev/mmcblk2p7 on /media/ido/oem type ext4 (rw,nosuid,nodev,relatime,uhelper=udisks2) /dev/mmcblk2p6 on /media/ido/userdata type ext4 (rw,nosuid,nodev,relatime,uhelper=udisks2) /dev/sda1 on /media/ido/U type vfat (rw,nosuid,nodev,relatime,uid=1001,gid=1001,fmask=0022,dmask=0022,codepage=936,iocharset=utf8,shortname=mixed,showexec,utf8,flush,errors=remount-ro,uhelper=udisks2)
由上面命令第2和29行可以看到
/dev/mmcblk2p8 on/type ext4 (rw,relatime),/dev/mmcblk2p8
挂载到根目录,/dev/mmcblk2p8就是我们需要的节点。U盘挂载目录为/media/ido/U。
# 挂载根文件目录 $ sudo mount /dev/mmcblk2p8 /mnt # 进入挂载文件夹 $ cd /mnt $ rm var/lib/misc/firstrun $ sudo tar -czf /media/ido/U/ido-rootfs.tar.gz ./* $ sync
注意:打包使用tar命令需要用sudo权限。
- 压缩包解压
将打包出的压缩包,解压至Ubuntu PC端环境,命令如下:
$ mkdir -p your/target/path/ $ sudo tar -xzf ido-rootfs.tar.gz -C your/target/path/
- 文件系统镜像制作
查看文件系统大小,如下所示:
$ sudo du -sh your/target/path/
制作镜像需要的脚本文件mk-rootfs-image.sh,文件位于工具包的pack-tools/roofs_mk/目录。根据系统大小修改 mk-rootfs-image.sh 脚本第25行的参数,默认镜像大小设置为4096MB。
dd if=/dev/zero of=${ROOTFSIMAGE} bs=1M count=0 seek=4096
注意:一般脚本中设置的镜像大小需要大于 du 返回值。
$ sudo cd pack-tools/roofs_mk/ $ sudo ./mk-rootfs-image.sh ../../your/target/path/
脚本正常运行退出后,可在目录得到rootfs.img的文件系统镜像。
制作整包固件update.img
前面文章得到了rootfs.img散包固件,接下来我们制作update.img整包固件。
此处分两种情况:
1. 只修改文件系统,只需将原本烧录的update.img镜像解包后,替换新制作的rootfs.img。
2. 如果除了文件系统外还有其他修改,则可以修改sdk源码编译脚本,编译的时候使用自定义的文件系统。
- 只修改文件系统的情况
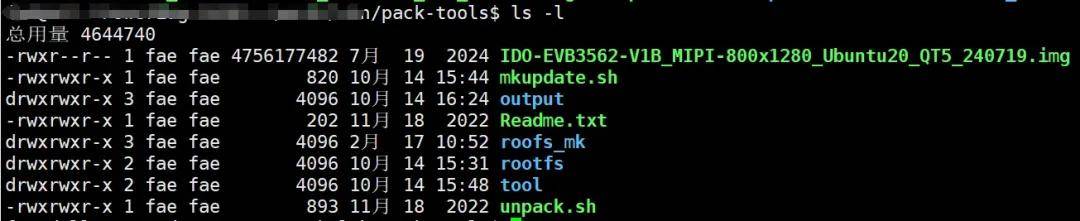
将需要解包的完整镜像文件拷贝到工具包 pack-tools 目录下,此处以完整镜像 IDO-EVB3562-V1B_MIPI-800x1280_Ubuntu20_QT5_240719.img为例。
执行解包脚本,将update镜像按照分区拆分出分区镜像。
$ ./unpack.sh IDO-EVB3562-V1B_MIPI-800x1280_Ubuntu20_QT5_240719.img
执行结果如下:
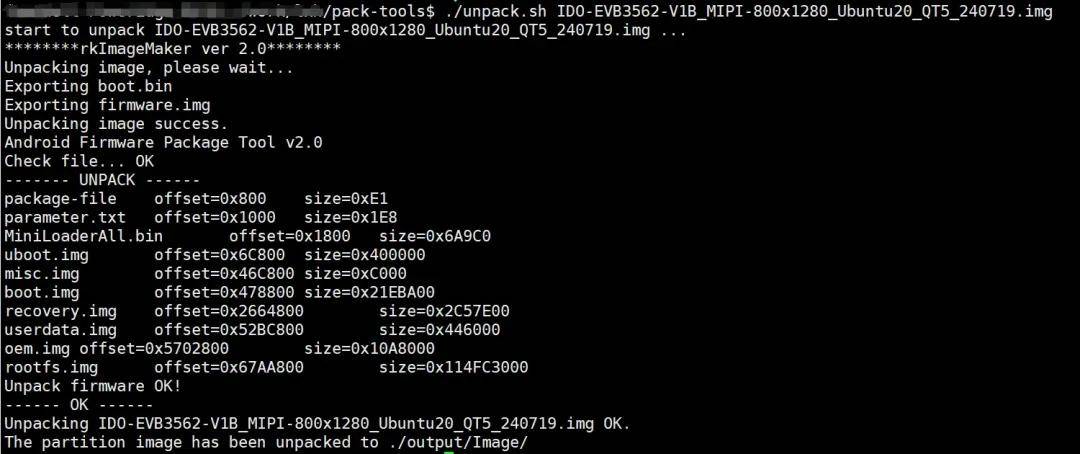
分区文件解包存放到./output/目录。

将文章第2节中打包好的文件系统镜像复制替换到./output/rootfs.img,文件名称必须为rootfs.img。
最后执行./mkupdate.sh脚本将分区镜像合并为一个完整的镜像update.img。
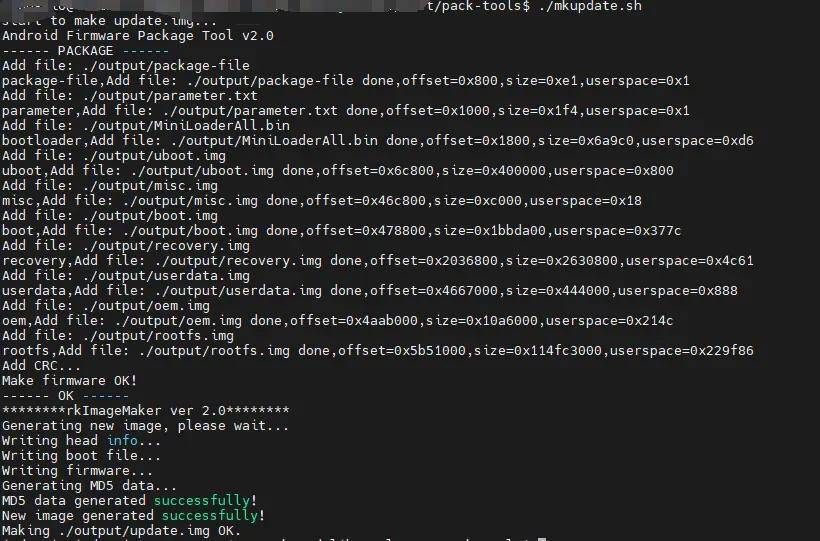
脚本运行成功后,将会产生新的整包文件./output/update.img。
- 除了文件系统外还有其他修改的情况
不同SDK修改的地方不一致,在sdk中新建自定义目录myrootfs,把rootfs.img放入其中(myrootfs和build.sh同级目录)。
mkdir myrootfs #将rootfs.img放入myrootfs中 ls myrootfs/rootfs.img
情况一:直接修改build.sh,使其编译时使用我们的rootfs.img打包。在build.sh的function build_rootfs()函数中,添加24-27行代码。
function build_rootfs(){ check_config RK_ROOTFS_IMG || return 0 RK_ROOTFS_DIR=.rootfs ROOTFS_IMG=${RK_ROOTFS_IMG##*/} rm -rf $RK_ROOTFS_IMG $RK_ROOTFS_DIR mkdir -p ${RK_ROOTFS_IMG%/*} $RK_ROOTFS_DIR case "$1" in yocto) build_yocto ln -rsf yocto/build/latest/rootfs.img \ $RK_ROOTFS_DIR/rootfs.ext4 ;; debian) build_debian ln -rsf debian/linaro-rootfs.img \ $RK_ROOTFS_DIR/rootfs.ext4 ;; distro) build_distro for f in $(ls distro/output/images/rootfs.*);do ln -rsf $f $RK_ROOTFS_DIR/ done ;; myrootfs) ln -rsf myrootfs/rootfs.img \ $RK_ROOTFS_DIR/rootfs.ext4 ;; *) build_buildroot for f in $(ls buildroot/output/$RK_CFG_BUILDROOT/images/rootfs.*);do ln -rsf $f $RK_ROOTFS_DIR/ done ;; esac
在执行build.sh lunch后,执行以下命令:
export RK_ROOTFS_SYSTEM=myrootfs
最后执行build.sh即可生成包含了rootfs.img的update.img整包固件。
./build.sh
rockdev/update.img即为我们所需的完整固件。
情况二:如果build.sh脚本中没有function build_rootfs()函数,则修改
./device/rockchip/common/scripts/mk-rootfs.sh,添加以下8-12行与35行代码:
....省略部分代码........ build_ubuntu20() { ln -rsf "$PWD/ubuntu/rootfs-ubuntu20.04-desktop.img" $ROOTFS_DIR/rootfs.ext4 finish_build build_ubuntu20 $@ } build_myrootfs() { ln -rsf "$PWD/myrootfs/rootfs.img" $ROOTFS_DIR/rootfs.ext4 finish_build build_myrootfs $@ } ....省略部分代码........ build_hook() { check_config RK_ROOTFS_TYPE || return 0 if [ -z "$1" -o "$1" = rootfs ]; then ROOTFS=${RK_ROOTFS_SYSTEM:-buildroot} else ROOTFS=$1 fi ROOTFS_IMG=rootfs.${RK_ROOTFS_TYPE} ROOTFS_DIR="$RK_OUTDIR/rootfs" echo "==========================================" echo " Start building rootfs($ROOTFS)" echo "==========================================" rm -rf "$ROOTFS_DIR" mkdir -p "$ROOTFS_DIR" case "$ROOTFS" in yocto) build_yocto "$ROOTFS_DIR" ;; debian) build_debian "$ROOTFS_DIR" ;; buildroot) build_buildroot "$ROOTFS_DIR" ;; ubuntu) build_ubuntu20 "$ROOTFS_DIR" ;; myrootfs)build_myrootfs "$ROOTFS_DIR" ;; *) usage ;; esac
修改
./device/rockchip/common/configs/Config.in.rootfs,添加以下7、20、21行代码:
config RK_ROOTFS_SYSTEM string default "buildroot" if RK_ROOTFS_SYSTEM_BUILDROOT default "debian" if RK_ROOTFS_SYSTEM_DEBIAN default "yocto" if RK_ROOTFS_SYSTEM_YOCTO default "ubuntu" if RK_ROOTFS_SYSTEM_UBUNTU default "myrootfs" if RK_ROOTFS_SYSTEM_MYROOTFS choice prompt "default rootfs system" help Default rootfs system. config RK_ROOTFS_SYSTEM_BUILDROOT bool "buildroot" depends on RK_BUILDROOT_BASE_CFG != "" config RK_ROOTFS_SYSTEM_DEBIAN bool "debian" depends on RK_DEBIAN_VERSION != "" config RK_ROOTFS_SYSTEM_UBUNTU bool "ubuntu" config RK_ROOTFS_SYSTEM_MYROOTFS bool "myrootfs"
在执行build.sh lunch命令后,执行以下命令:
export RK_ROOTFS_SYSTEM=myrootfs
最后执行build.sh命令,即可生成包含了rootfs.img的update.img整包固件。
./build.sh
rockdev/update.img即为我们所需的完整固件。
-
开发板
+关注
关注
25文章
5725浏览量
105644 -
Linux开发
+关注
关注
0文章
39浏览量
7357 -
RK3568
+关注
关注
5文章
591浏览量
6546 -
RK3588
+关注
关注
7文章
428浏览量
6010 -
RK3566
+关注
关注
0文章
157浏览量
5797
发布评论请先 登录

新一代低价开发板芯片RK3562来啦! — 触觉智能RK3562开发板

Linux系统连接蓝牙、WiFi方法分享,适用瑞芯微RK3562等主板产品
Linux系统挂载exfat格式U盘教程,触觉智能RK3562开发板演示
瑞芯微主板/开发板Linux系统播放音频方法,触觉智能RK3562开发板演示
瑞芯微平台Android系统串口测试方法,触觉智能RK3562开发板演示

嵌入式开发必备-RK3562演示Linux常用系统查询命令(上)触觉智能出品
嵌入式开发必备-RK3562演示Linux常用系统查询命令(下)
Linux系统更换开机logo方法教程,触觉智能RK3562开发板演示


RK3562开发板uboot下GPIO的控制方法,触觉智能嵌入式方案商
Linux系统查看及修改设备型号信息,触觉智能RK3562开发板演示

告别烧固件,RK3562开发板Android系统屏幕方向临时设置小妙招





 工商网监
工商网监
评论