 智元机器人开源资料 智元灵犀X1开发指南
智元机器人开源资料 智元灵犀X1开发指南

给大家带来一些智元机器人开源资料 ;这里主要分享给大家 智元灵犀X1开发指南。
智元机器人将其自主研发的全栈开源机器人智元灵犀X1面向全球开发者正式开源,在提供核心组件的基础上,智元机器人完整地开源了软硬件全套图纸和代码,总资料大小超过1.2GB。在整机结构硬件方面,提供了整机结构图纸、整机硬件框图、整机BOM,细致到每一个螺丝和齿轮,确保开发者能够精确理解和复现他们的设计理念,整机全部物料均可通过自行加工或者购买方式获取,还特别提供整机装机说明,帮助开源用户迅速完成机器人本体的组装。在整机软件算法方面,提供了AimRT平台组件、机器人URDF文件、仿真Sim2Sim、Sim2Real代码、强化学习训练代码、模型转换、推理工具,和调试工具(数据可视化、遥控器)等等,“一站式”全套图纸和代码帮助大家更好地学习人形机器人开发流程。
毫无疑问,灵犀X1的开源大幅降低了机器人开发的门槛,无论是企业还是个人,是学生还是爱好者,都能够以更简单的方式去开发机器人的各种软件算法,包括运动控制、感知系统、人机交互等。
智元灵犀X1机器人开发资料 软硬件全套图纸和代码
https://bbs.elecfans.com/jishu_2460649_1_1.html
BOM清单、整机STEP、整机图纸(SolidWorks)、装机SOP。
智元灵犀X1整机标零作业指导书
*附件:智元灵犀X1整机标零作业指导书.xlsx
关于智元灵犀X1
灵犀X1采用串并联混合构型手臂和差分驱动双肩关节设计,整臂仅重2.5kg。依托智元X-Lab自研的PowerFlow两款模块化关节,实现全身三十多个自由度的精准操控。
另外还支持独特的“机-机模式”,将手机屏幕作为机器人的“脸”,同时手机也作为机器人的“大脑”。
那么在灵犀X1正式开源后,我们来看一下实际的开源资料都有哪些,是不是普通人也能“手搓”机器人 了?

首先在智元机器人官网上,目前已经放出了灵犀X1的开发指南,官方表示根据该指南即可完成机器人的搭建。而其中设计资料官方也提供了下载链接,包括BOM清单、整机STEP、整机图纸(SolidWorks)、装机SOP等。
从官方的BOM清单中我们看到,灵犀X1共有175种物料,其中结构件需要自行定制,大部分可以用3D打印制造,也有部分需要进行机加工,比如脚踝连杆就需要用到钛合金材料,脚踝连接轴用到40Cr钢等材料。
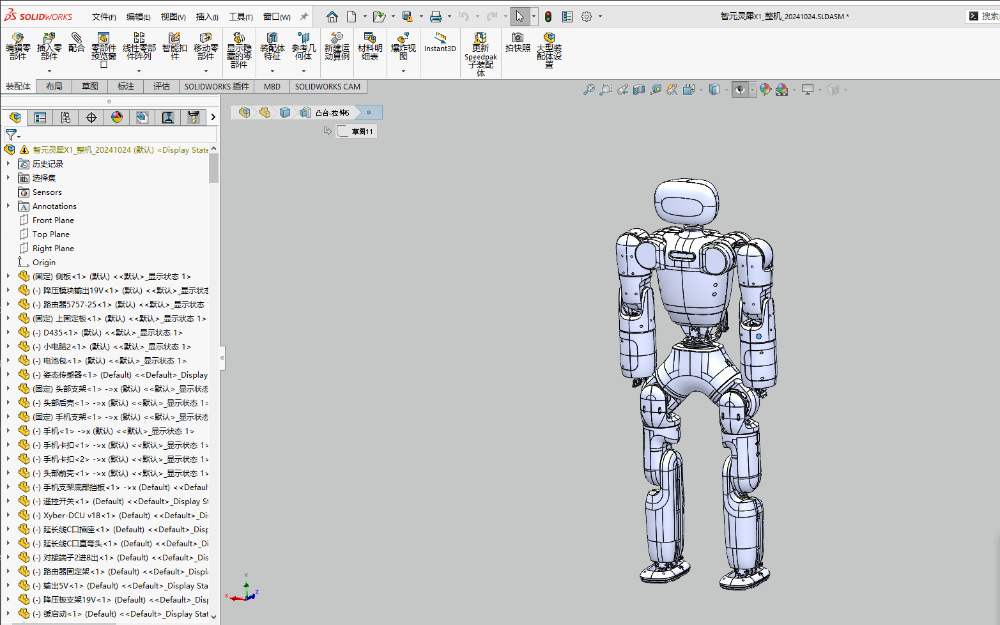
同时智元提供了详细的整机SolidWorks建模图纸,可以根据图纸来进行制作相应的零部件。

在电子硬件部分,可以BOM清单上的部件看到大部分都能够在网上购买,甚至还给出了相应的购买链接。当然核心的PowerFlow关节电机、域控制器DCU等还需要向智元购买,目前官网的通用人形机器人套件,包括6个PowerFlow R86-3、9个PowerFlow R86-2、10个PowerFlow R52、4个PowerFlow L28、2个域控制器 、2个自适应夹爪,售价为54818,并已经售罄。
如果你已经准备好BOM清单上的物料,那么在装机SOP文件中,智元提供了133页的整机组装指导,你可以像搭建乐高积木一样,按照步骤将零部件组装成灵犀X1。

在组装好灵犀X1之后,在软件部分也同样可以直接使用智元提供的推理和训练代码。据官方文档介绍,X1的软件系统基于智元开源组件AimRT作为中间件实现,并且采用强化学习方法进行运动控制。智元提供灵犀X1所使用的强化学习训练代码,配合配套的推理软件可以进行真机和仿真的行走调试,或导入其他机器人模型进行训练。
官方文档介绍--智元灵犀X1开发指南
灵犀X1概述
1. 整机结构
灵犀X1全身包含29个关节(R86-29、R86-36、R5210、L284)和2个夹爪,支持扩展头部3自由度。

2. 整机硬件

3. 开源资料(更新时间:2025.03.07)
3.1 设计资料
BOM清单、整机STEP、整机图纸(SolidWorks)、装机SOP可通过以下任一途径下载:
百度云盘:https://pan.baidu.com/s/1UEdeDBTJiXRmIqMKwmO5RA?pwd=1234(提取码:1234)
谷歌云盘:https://drive.google.com/drive/folders/1MECbyKRJbnc_XKWsdUbn-70xmYFmw9FW?usp=sharing
Github:https://github.com/AgibotTech/agibot_x1_hardware
3.2 开源代码
推理代码:https://github.com/AgibotTech/agibot_x1_infer
训练代码:https://github.com/AgibotTech/agibot_x1_train
4. X1整机开发流程(更新时间:2025年1月14日)
依次按照如下流程操作即可完成智元灵犀X1机器人的搭建,
4.1 执行器状态确认
X1整机装配前,针对各个执行器做确认工作,防止装机后需要重新标定设置,以下是执行器的状态确认流程。
上位机可以通过命令行显式地更改R86-3/R86-2/R52/L28执行器内部的参数,在第一次使用时建议充分了解参数配置的方法。
注:以R系列的执行器为主,L28执行器有不同点会进行标注。
4.1.1 准备环境
准备一台Windows系统的电脑,并下载上位机软件 REF-CLI v1.0.3.exe 。
1.给执行器上电,用 USB-C 数据线(注:L28为4pin USB线)将执行器连接至电脑,并打开上位机软件。等待上位机识别成功后,会有如下显示:

此时,编号为 00003986464D 的设备在上位机中的索引名为 ref0,下发指令需要与设备名一致。
在上位机中直接键入 ref0 并敲击回车,会显示当前执行器的基本信息。根据下图所示,当前的固件版本为 3.2.7,CAN总线ID为1。

注:可通过机身镭射的14位SN码区分执行器版本, 区分方式如下,
SN第6、7位为版本号,有20和30两种,
X1 0 0X 20 XXXXXXX X1 0 0X 30 XXXXXXX
V2执行器(版本号20)的固件版本为3.2.7
V3执行器(版本号30)的固件版本为3.2.9
- 查询执行器内部参数模式,输入指令: ref0.motor.config,默认为模式6=MIT混合控制,如下图所示:

注:详细操作方式,见智元灵犀X1 PowerFlow R系列执行器产品手册。
4.1.2 LED状态指示
| LED | 含义 |
|---|---|
| 绿色闪烁 | 失能状态 |
| 绿色常亮 | 使能状态 |
| 红色常亮 | 错误状态(注:L28此处为蓝色闪烁) |
| 蓝色常亮 | 电机校准中(出厂默认校准完毕) |
4.1.3 使能 / 失能
执行器上电后为失能状态,可以通过以下指令进行状态切换,并观察LED状态进行判定。
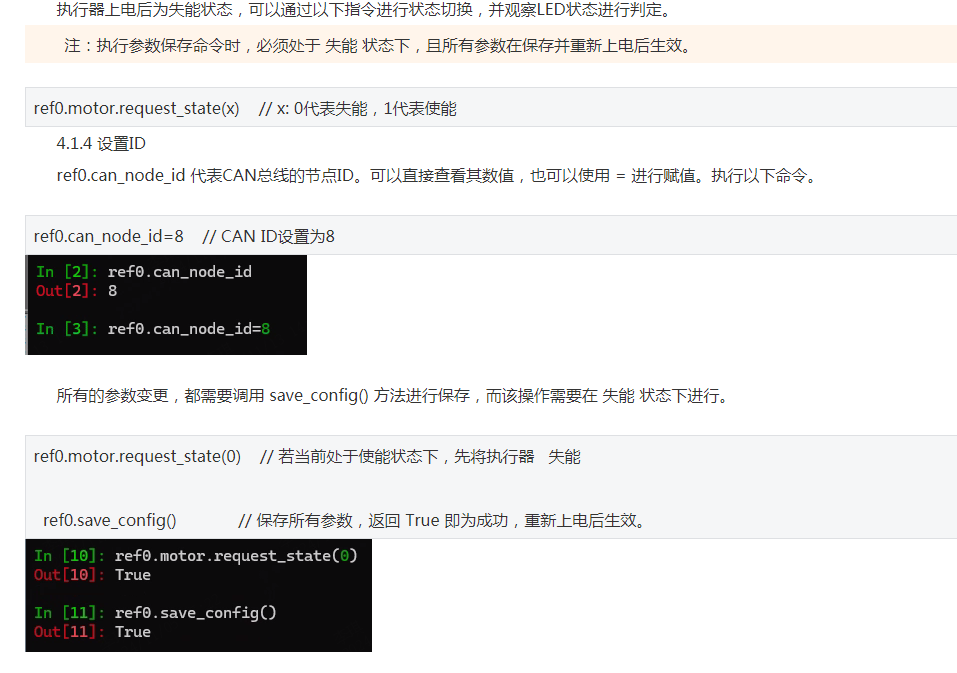
4.1.5 执行器标零
注:L28上电自动回零,不支持手动标零。
用户可以自行设置执行器的零位,在失能状态下输入以下命令:
ref0.motor.apply_user_offset() // 保存当前位置为零位
ref0.motor.request_state(0) // 若当前处于使能状态下,先将执行器 失能
ref0.save_config() // 保存所有参数,返回 True 即为成功,重新上电后生效。

4.2 执行器桌面联调测试
4.2.1 接线说明
按照整机接线方案进行连接,包含DCU以及所有关节。

4.2.2 测试步骤
注:该测试是桌面联调环境,所有关节会使能并执行正反向运动,请勿用于整机环境!!!
PC需要X86架构CPU,并且安装Ubuntu22.04 实时系统

1.下载联调测试软件 xyber_dcu_test_v0.1.3.zip
2.进入 cfg目录,打开 x1_test_cfg.yaml,修改对应的网卡名称,也可以屏蔽掉缺失的关节。若不希望执行器运动,可以将 move_actuator 字段设为 false,这样测试程序只会对执行器进行使能操作以验证整机通信。imu_dcu_name 字段可以开关IMU数据的检查,详见注释。

3.执行测试脚本,根据提示输入密码
4.所有关节会执行 使能->正转->反转->停止 步骤,软件会自动判断其是否运动到位。观察日志打印,若测试失败会红色打印log。
4.3 整机组装
完成整机组装方法请参照3.1 设计资料 中的智元灵犀X1装机SOP 部分及智元灵犀X1装机视频教程https://agibotmall.com/video的说明。
4.4 IMU调试
灵犀X1使用的IMU为 YIS320,具体型号请参考开源BOM清单。
目前软件中只启用了下肢DCU所连接的IMU,只连接一个下肢IMU即可。
DCU与IMU是串口通信,波特率为921600,购买IMU需要用其自带的上位机检查一下波特率,并将输出频率调整至最大值。

4.5 整机硬件部署
请按照如下步骤完成X1整机的硬件确认,
STEP1: 按照SOP接线完成以后,使用万用表,拨码到短路测试挡位,测试电池的或者电源的正极(万用表红色笔芯)和负极(万用表黑色笔芯),如果万用表没有发出蜂鸣声,则代表正负极无短路。
STEP2: 正负极确认没有短路后,把总开关船型开关打开,让开关处于ON的状态。
STEP3:拿出整机物料中的钥匙无线开关,按下ON 按键,整机上电。
STEP4:整机上电完毕,没有出现异常,例如指示灯异常(具体参考4.2指示灯定义)或者异常下电(缓起板指示灯熄灭)等情况,则可以按照手册进行后续调试步骤。
4.6 整机标零
整机标零请参照* 智元灵犀X1整机标零作业指导书*
4.7 整机软件部署
软件部署方法请参照3.2 开源代码 中的推理代码部分的说明。
-
机器人
+关注
关注
213文章
29829浏览量
213547 -
BOM
+关注
关注
5文章
268浏览量
41497 -
人形机器人
+关注
关注
7文章
750浏览量
17673 -
智元机器人
+关注
关注
1文章
21浏览量
784
发布评论请先 登录
图纸代码完全开源!稚晖君:人人都能造人形机器人!






 工商网监
工商网监
评论