 小米又投了一家机器人传感器公司 纬钛机器人
小米又投了一家机器人传感器公司 纬钛机器人

4月15日,上海纬钛科技有限公司(下文简称“纬钛机器人”)官宣获得近亿元天使/天使+轮融资。
其中,天使轮由小米战投领投,宽桥恒松、雅瑞资本、iCANX Fund、梅花创投、微光创投及老股东跟投;天使+轮由祥峰投资、雅瑞资本、iCANX Fund、梅花创投、微光创投联合投资,万甲资本担任独家财务顾问。雅瑞资本、iCANX Fund、梅花创投和微光创投连续参与了两轮投资。
纬钛机器人称,本轮融资将用于推进基于视觉的触觉传感技术、手眼协同算法研发及商业化落地,打造通用类人机器人末端感知系统、手眼协同算法以及场景解决方案,同时加速拓展海外市场,构建全球竞争力。
小米战略投资部表示:“小米集团始终致力于推动智能科技与机器人技术的深度融合,为全球用户创造更智能、更便捷的未来生活。纬钛机器人在智能机器人核心算法与场景化应用方面展现出卓越的创新实力,与小米‘以技术为本,推动产业进步’的理念高度契合。此次领投纬钛机器人的天使轮融资,是小米战投在智能硬件与机器人生态布局的重要一步。我们期待通过资本与产业资源的协同,加速纬钛机器人在技术研发与商业化落地上的突破,共同探索机器人技术在消费、服务等领域的无限可能,让更多人享受科技带来的美好生活。”。
小米自2021年8月发布首款仿生四足机器人CyberDog后,在机器人领域的布局加速,2022 年 8 月,小米发布首款全尺寸人形机器人CyberOne,2023年4月,小米机器人公司在北京亦庄注册成立,成为小米集团专注于仿生机器人技术创新与产品研发、产业化的唯一主体。2023年8月小米CyberDog2发布。今年3月份,有消息称小米机器人 CyberOne 正分阶段落地亦庄产线。
小米加速布局机器人产业背后,亦对传感器等机器人核心零部件产业链进行了大规模投资。今年1月份,小米投资入股了国产六维力传感器厂商坤维科技。
触觉传感器是机器人灵巧手、电子皮肤的核心且不可或缺的传感器部件,除本次投资的纬钛机器人外,小米亦投资了能斯达(气体传感器龙头汉威科技控股企业)、钛深科技等多家国产触觉传感器公司。
纬钛机器人为什么获得小米等资本的青睐?
纬钛机器人成立于2024年1月,起源于美国麻省理工学院(MIT)计算机科学与人工智能实验室(CSAIL),是一家以视触觉传感和手眼协同为核心的高科技公司。
纬钛机器人总部位于上海,研发及运营团队主要来自于美国麻省理工学院、清华大学等海内外知名高等院校,均拥有10年以上的全栈机器人开发能力,计算机视觉、触觉传感、自动驾驶、操控及移动底盘技术积累和机械臂开发及产品落地经验,以及企业管理、商业运营等经验。
其中,纬钛机器人创始人李瑞博士自2005年便开始机器人和计算机视觉等领域的研究,后在MIT读博期间师从美国国家科学院院士、美国人文与科学院院士Edward Adelson教授(也称Ted Adelson)。 值得一提的是,在视触觉传感器领域,全球顶尖人才主要来自于MIT研发Gelsight/Gelslim的两个实验室。
官方介绍显示,在博士阶段专门针对机器人应用,李瑞和导师开创并引领了基于视觉的触觉传感器(视触觉)的研究路线,研发出了全球第一款具有超高分辨率的机器人视触觉传感器:GelSight指尖传感器(Fingertip GelSight),其在多方面性能媲美甚至超越人类手指,凭借高分辨率、多维力探测、柔性物体操作及低成本等巨大优势,被学术界公认为全球最佳触觉解决方案。相比传统触觉方案或纯视觉技术,其技术路径更贴近商业化需求,可快速实现机器人感知与操作能力的跨越式突破。
▲李瑞在MIT读博期间做出了全球第一款超高分辨率的视触觉传感器「GelSight指尖传感器」
GelSight技术最初由Edward Adelson教授实验室于2009年发明,可以实现物体微观表面几何特征的高精度捕捉,但早期体积大、质量重、运行慢,仅仅应用于物体表面纹理的缺陷检测,与机器人没有任何关系。
此后,李瑞在2011年开始独立领导其在机器人领域的研究方向,经过多达几十次的软硬件重要迭代,后续公开发布了全球第一款超高分辨率的GelSight指尖传感器,并开创性的展示了其在机器人领域的巨大潜力,大大拓展了机器人灵巧操作能力的上限。
李瑞和其导师的突破性研究工作,拉开了MIT的GelSight视触觉传感器研究的序幕,开辟了一条崭新的触觉传感器赛道。
GelSight视触觉传感器技术历经10多年发展,经过多次的技术迭代,但长期停留在学术界,在产业化应用几乎为零。
2024年,李瑞与伙伴成立纬钛机器人公司,开启GelSight视触觉传感器技术的产业化探索。值得一提的是,在创立纬钛机器人之前,李瑞曾在硅谷创办知名无人驾驶公司Robby Technology并入选YC,完成数百万美元融资。
依托李瑞与GelSight视触觉传感器技术,纬钛机器人推出全球首款面向工业场景的视触觉传感器产品“GelFinger”。
有别与此前实验性质的GelSight视触觉传感器,GelFinger传感器从设计之初就聚焦工业级可靠性、耐久性、成本控制与场景适配性。据纬钛机器人透露,目前GelFinger传感器已实现小批量出货,与多家科研机构及头部制造业客户达成合作,在精密装配、柔性抓取等场景完成初步商业化验证。
什么是视触觉传感器?这条崭新传感器赛道获得高瓴、小米、联想等资本青睐
目前,触觉传感器有多条技术路线,一条是传统的柔性触觉传感器技术,基于霍尔效应及柔性感知材料,国内能斯达、钛深科技、帕西尼感知科技等多家传感器公司聚焦于该领域的研发。
而视触觉传感器(Vision-Based Tactile Sensor,VBTS)路线是一条崭新的触觉传感器技术路线,其技术主要来源于麻省理工学院,全球从事视触觉传感器研发的人才几乎来自MIT。
在国内,亦有多家视触觉传感器初创企业成立,除纬钛机器人,较知名的企业还有千觉机器人、戴盟机器人等公司。
千觉机器人成立于2024年5月,同年10月获得高瓴创投(GL Ventures),璞跃中国(Plug and Play China)、交大菡源基金等机构的数千万元人民币天使轮投资,创始人马道林被业内认为是目前触觉感知领域技术能力最为突出的科学家之一,马道林同样来自MIT研发Gelsight/Gelslim的实验室。
戴盟机器人成立于2023年8月,2024年11月宣布连续完成两轮亿元级天使+轮融资,由金鼎资本、国中资本、联想创投等机构投资,戴盟机器人由香港科技大学机器人研究院创始院长王煜教授及其学生段江哗博士联合创立。
什么是视触觉传感器?
视触觉传感器顾名思义,就是基于视觉的触觉传感器。
人类在操作物体的时候,手部的触觉信息包含两个维度:物体本身的状态和接触的状态;其中物体本身的状态信息包含表面纹理、物体形状、软硬度;接触状态信息包含法向力(垂直人手皮肤)、剪切力(平行人手皮肤)、相对滑动和物体的位姿。
对上述触觉信息,大多数触觉传感器比如压阻式、压电式、电容式和电磁式大都只能感受法向力,而对其他信息无法采集或灵敏度很低。VBTS和其他触觉方案相比,最大的优点就是可以高灵敏地感知上述全部信息,非常接近人手的触觉信息维度。
基于荧光点的视触觉传感器早在2004年就由东京大学团队提出过(GelForce),但分辨率不高。
GelSight是第一个超高分辨率的视触觉传感器,它于2009年由MIT计算机科学与人工智能实验室(CSAIL)的Edward Howard Adelson(简称Edward Adelson)研究小组提出,纬钛机器人创始人李瑞博士在其中也做了大量的研究工作。
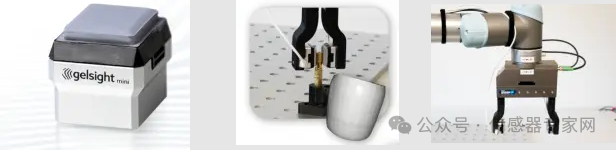
▲GelSight视触觉传感器本体和应用场景
GelSight是由“Gel”和“Sight”组成,Gel(凝胶)是传感器弹性接触表面使用的材料;Sight(视觉),传感机制是使用摄像头采集视觉图像。
基本原理上,在GelSight触觉传感器接触物体时,内置的摄像头在LED灯光的辅助下捕捉接触物体的凝胶产生的形变,通过计算机视觉的算法将凝胶形变信息与触觉信息进行映射。
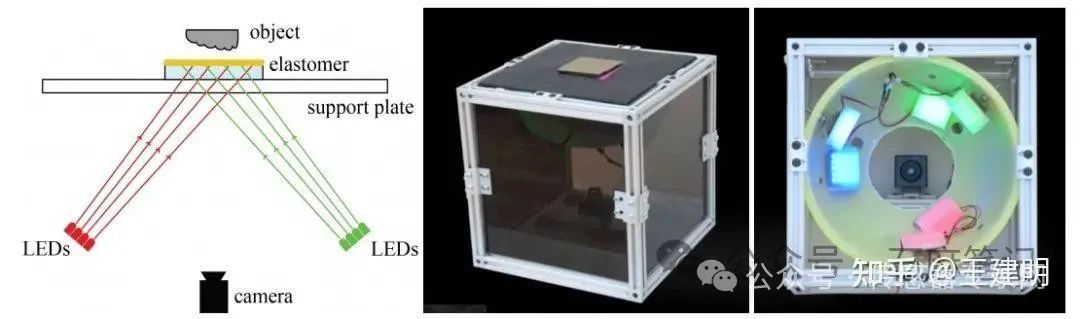
▲视触觉传感器结构
视触觉传感器由接触模块、照明模块、图像采集模块和信息处理模块组成。接触模块包含接触体、反射层、标记层和保护层,它是整个传感器的核心。不同的功能层则代表了不同的传感原理,比如基于膜反射和基于标记物的表征。
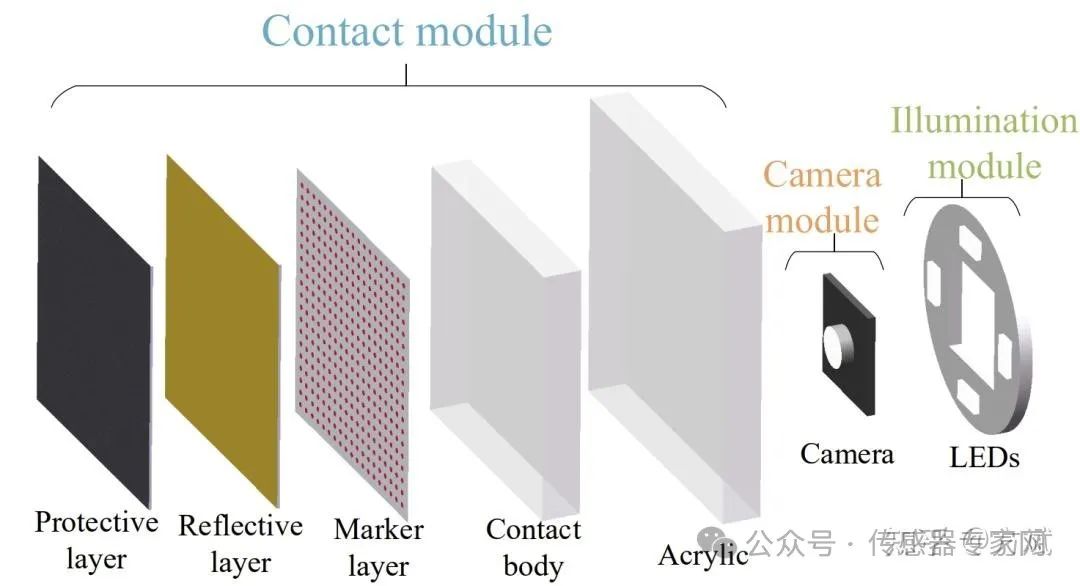
▲视触觉传感器的结构组成

▲GelSight视触觉传感器实物拆解,左图为接触模块,右图为图像采集模块及照明模块
目前,视触传感器推到了机器人触觉感知领域的最前沿,获得了全球顶尖高校和科研机构的认可和跟随,AI机器人领域的顶级高校MIT、Stanford、CMU、UCB、UIUC、ETH、牛津、清华、北大、上交、港科大、中科院等高校以及Meta、TRI(丰田)等大企业都推出过基于GelSight的各项工作。
随着人形机器人产业化浪潮,视触传感器技术也从实验室走向产业化前沿,纬钛机器人、千觉机器人、戴盟机器人等国产视触传感器技术初创企业相继成立,推动中国视触传感器的产业化发展。
结语
长期以来,触觉传感器领域产业化发展缓慢,技术突破迟滞,主要原因或在于没有爆炸性的需求推动触觉传感器的产业化进程。
随着机器人的需求增加,作为灵巧手、电子皮肤的核心,对触觉传感器有着天然的“刚需”,促使资本关注触觉传感器这条赛道,有望加速触觉传感器的产业化进程。
-
传感器
+关注
关注
2567文章
53145浏览量
768927 -
机器人
+关注
关注
213文章
29829浏览量
213620 -
小米
+关注
关注
70文章
14476浏览量
147853 -
电子皮肤
+关注
关注
3文章
115浏览量
18750 -
触觉传感器
+关注
关注
4文章
105浏览量
9755
发布评论请先 登录
工业机器人的特点
有一家机器人企业IPO!年销695万台传感器,海外割草机器人撬动新增长
盘点#机器人开发平台
比亚迪,悄悄投了深圳这家机器人传感器公司

详细介绍机场智能指路机器人的工作原理
【「# ROS 2智能机器人开发实践」阅读体验】视觉实现的基础算法的应用
【「# ROS 2智能机器人开发实践」阅读体验】机器人入门的引路书
【「# ROS 2智能机器人开发实践」阅读体验】+内容初识
发力机器人传感器领域,华培动力拟设立机器人全资子公司






 工商网监
工商网监
评论