 磁致伸缩位移传感器物理滤波和数字滤波
磁致伸缩位移传感器物理滤波和数字滤波

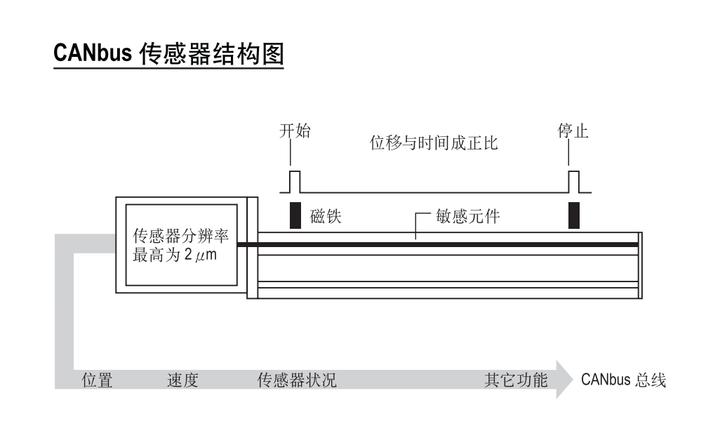
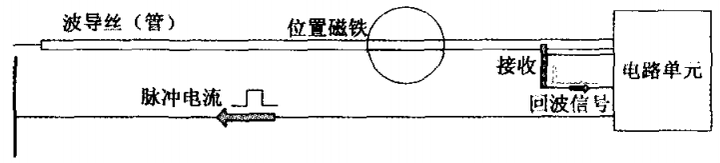
磁致伸缩位移传感器在实际应用中,为了提高测量精度和稳定性,通常会采用物理滤波和数字滤波技术。这两种滤波方法分别在信号处理的不同阶段发挥作用,下面我将详细介绍它们的原理和应用。
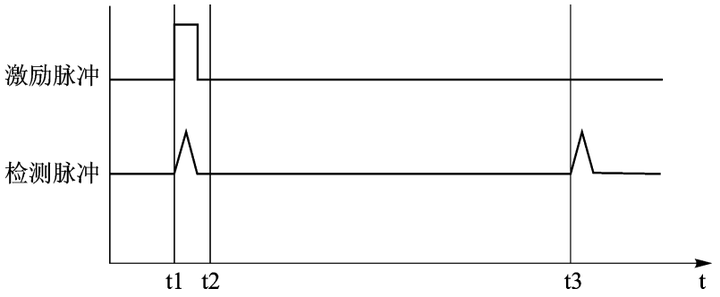
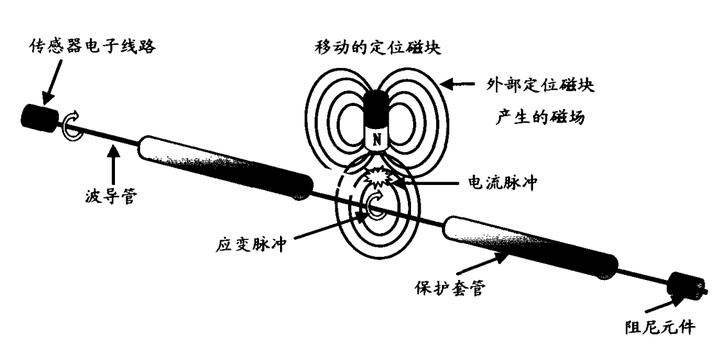
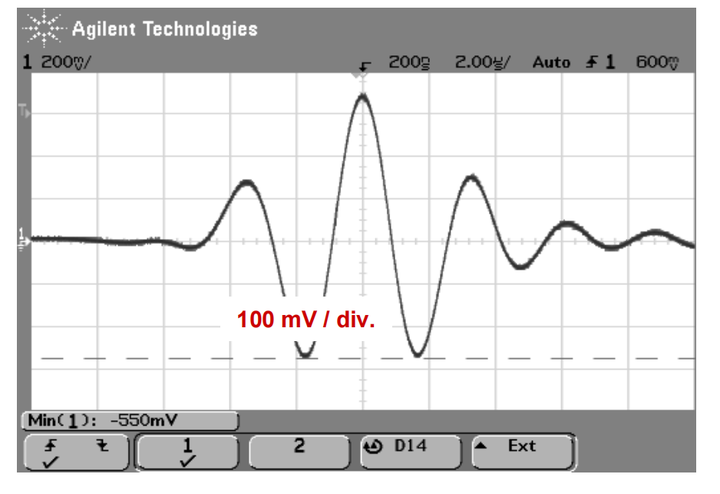 磁致伸缩位移传感器波形
磁致伸缩位移传感器波形
物理滤波
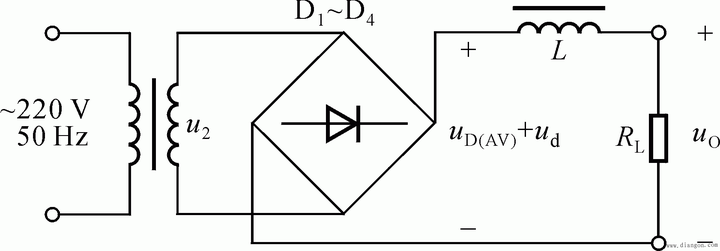
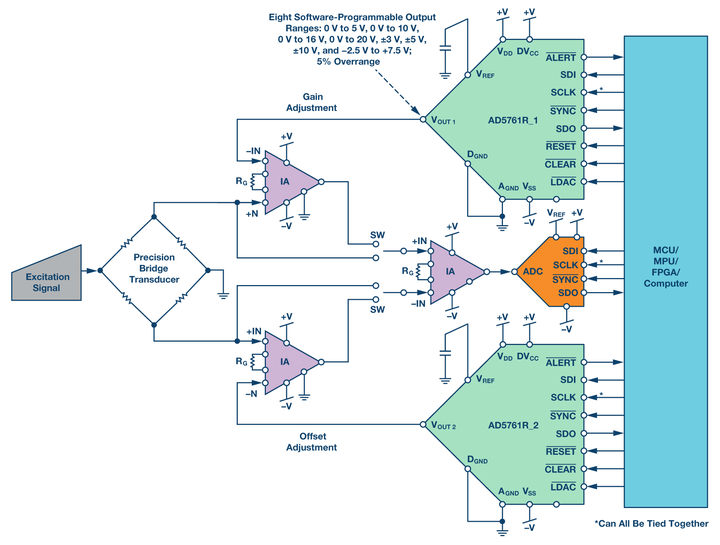
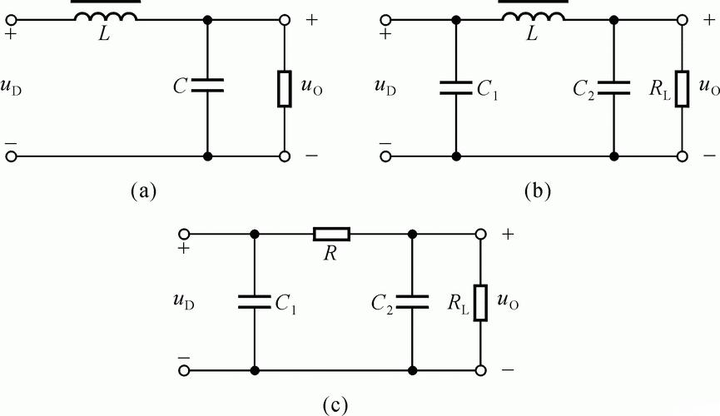 磁致伸缩位移传感器物理滤波电路
磁致伸缩位移传感器物理滤波电路
物理滤波是指在传感器硬件层面进行的信号处理,主要用于消除或减少外部干扰和噪声。常见的物理滤波方法包括:
1、低通滤波器:
作用:允许低频信号通过,而抑制高频噪声。
应用:在传感器的前置放大电路中使用低通滤波器,可以有效滤除高频噪声,提高信号的信噪比。
2、高通滤波:
作用:允许高频信号通过,而抑制低频噪声。
应用:在某些情况下,低频噪声(如温度漂移)可能会影响测量结果,高通滤波器可以用来滤除这些低频噪声。
3、高通滤波:
作用:允许特定频率范围内的信号通过,而抑制其他频率的信号。
应用:在需要精确控制信号频率范围的情况下,带通滤波器可以用来滤除不需要的频率成分。
4、陷波滤波器:
作用:专门用于消除特定频率的噪声。
应用:例如,如果传感器受到50Hz或60Hz电源线的干扰,可以使用陷波滤波器来滤除这些特定频率的噪声。
数字滤波
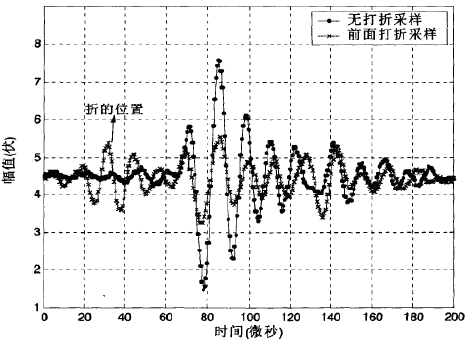
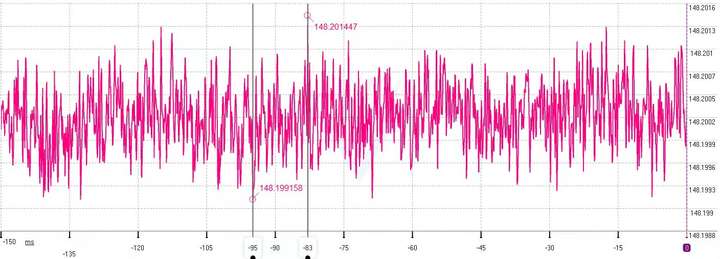 磁致伸缩位移传感器数字滤波波形
磁致伸缩位移传感器数字滤波波形
数字滤波是指在信号经过模数转换(ADC)后,在软件层面进行的信号处理。数字滤波具有灵活性高、可编程性强等优点。常见的数字滤波方法包括:
FIR滤波器(有限脉冲响应滤波器):
特点:非递归结构,具有线性相位特性。
应用:适用于需要严格线性相位的应用场合,如图像处理、音频处理等。
2、IIR滤波器(无限脉冲响应滤波器):
特点:递归结构,计算效率高,但可能存在相位失真。
应用:适用于对计算资源要求较低且可以容忍一定相位失真的场合,如控制系统中的信号处理。
3、卡尔曼滤波器:
特点:结合了系统的动态模型和测量数据,能够提供最优估计。
应用:适用于需要对系统状态进行实时估计的场合,如导航系统、机器人定位等。
4、滑动平均滤波器:
特点:简单易实现,适用于平滑信号和减少随机噪声。
应用:广泛应用于各种信号处理场合,特别是在需要快速实现且对精度要求不高的情况下。
综合应用
在实际应用中,物理滤波和数字滤波通常是结合使用的,以达到最佳的信号处理效果。例如:
前端物理滤波:在传感器输出信号进入ADC之前,使用低通滤波器或带通滤波器来滤除高频噪声,提高信号的信噪比。
后端数字滤波:在信号经过ADC转换为数字信号后,使用FIR或IIR滤波器进一步平滑信号,去除剩余的噪声,并进行必要的信号处理和分析。
通过这种综合应用,可以有效地提高磁致伸缩位移传感器的测量精度和稳定性,确保其在复杂环境下的可靠工作。
本文转载于深圳市博尔森科技有限公司官网:http://www.brsen.com
审核编辑 黄宇
-
位移传感器
+关注
关注
5文章
1185浏览量
35341 -
数字滤波
+关注
关注
1文章
57浏览量
17075
发布评论请先 登录

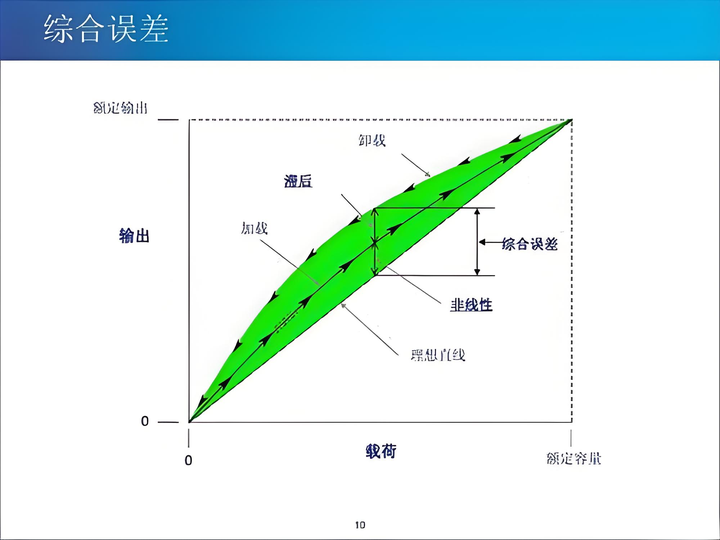
磁致伸缩位移传感器误差分析
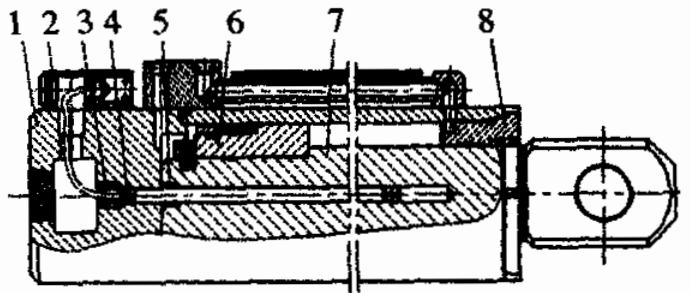
内置磁致伸缩位移传感器的推移油缸





 工商网监
工商网监
评论