 AM69A系列 32 TOPS视觉SoC,适用于1-12个摄像头、自主移动机器人、机器视觉、移动 DVR、AI-BOX技术手册
AM69A系列 32 TOPS视觉SoC,适用于1-12个摄像头、自主移动机器人、机器视觉、移动 DVR、AI-BOX技术手册

AM69、AM69A 可扩展处理器系列基于进化的 Jacinto? 7 架构,针对智能视觉相机应用,并建立在 TI 在视觉处理器市场领导地位十多年积累的广泛市场知识之上。AM69x 系列专为工厂自动化、楼宇自动化和其他市场中的各种成本敏感型高性能计算应用而构建。
AM69 和 AM69A 以行业领先的功耗/性能比为传统和深度学习算法提供高性能计算技术,并具有高水平的系统集成度,可实现高级视觉相机应用的可扩展性和更低的成本。关键内核包括用于通用计算的最新 Arm 和 GPU 处理器、具有标量和矢量内核的下一代 DSP、专用深度学习和传统算法加速器、集成的下一代成像子系统 (ISP)、视频编解码器和隔离的 MCU 岛。所有这些都受到工业级安全和安保硬件加速器的保护。
*附件:am69a.pdf
通用计算内核和集成概述:Arm? Cortex-A72? 的两个四核集群配置(共 8 核)可促进多作系统应用程序,对软件管理程序的需求最小。多达两个双核(共 4 个内核)Arm? Cortex-R5F? 子系统支持低级时序关键型处理任务,使 Arm? Cortex-A72? 内核不受应用影响。TI 的第 7 代 ISP 以现有的世界级 ISP 为基础,具有处理更广泛传感器套件的灵活性、对更高位深度的支持以及针对分析应用的功能。集成的诊断和安全功能支持高达 SIL-2 级别的作,而集成的安全功能可保护数据免受现代攻击。CSI2.0 端口支持多传感器输入。
关键性能内核概述:C7000? DSP 下一代内核 (“C7x”) 将 TI 业界领先的 DSP 和 EVE 内核组合到一个更高性能的内核中,并增加了浮点矢量计算功能,从而在简化软件编程的同时实现对传统代码的向后兼容性。四个“MMAv2”深度学习加速器可在业内最低的功耗范围内实现高达 32 万亿次每秒作 (TOPS) [每个内核 8TOPS] 的性能,即使在 105°C 和 125°C 的最坏结温下运行也是如此。 专用的 Vision 硬件加速器提供 Vision 预处理,而不会影响系统性能。C7x/MMA 内核仅适用于 AM69、AM69A 类处理器中的深度学习功能。
特性
处理器内核:
多达 8 个 64 位 Arm Cortex-A72 微处理器子系统,频率高达 2GHz
- 每个四核 Cortex-A72? 集群 2MB 共享 L2 缓存
- 每个 Cortex-A72? 内核 32KB L1 D-Cache 和 48KB L1 I-Cache
最多 4 个 Deep Learning Accelerator:
- 每个都有高达每秒 8 万亿次作 (TOPS)
- 每秒总计 32 万亿次作 (32TOPS)
双核 Arm Cortex-R5F MCU,在通用计算分区中高达 1.0GHz,带 FFI
- 16KB L1 D-Cache、16KB L1 I-Cache 和 64KB L2 TCM
双核 Arm? Cortex-R5F? MCU,频率高达 1.0GHz,支持设备管理
- 所有内存均支持 32K L1 D-Cache、32K I-Cache 和 64K L2 TCM,带 SECDED ECC
最多两个带有图像信号处理器 (ISP) 和多个视觉辅助加速器的视觉处理加速器 (VPAC)
- 480MPixel/s 图像处理器
- 支持高达 16 位的输入 RAW 格式
- 宽动态范围 (WDR)、镜头畸变校正 (LDC)、视觉成像子系统 (VISS) 和多标量 (MSC) 支持
- 输出颜色格式 : 8 位、12 位和 YUV 4:2:2、YUV 4:2:0、RGB、HSV/HSL
多媒体:
- 显示子系统支持:
- 3D 图形处理单元
- 三个 CSI2.0 4L 摄像机串行接口 RX (CSI-RX) 和两个带 DPHY 的 CSI2.0 4L TX (CSI-TX)
- 符合 MIPI CSI 1.3 标准 + MIPI-DPHY 1.2
- CSI-RX 支持 1、2、3 或 4 数据通道模式,每通道高达 2.5Gbps
- CSI-TX 支持 1、2 或 4 数据通道模式,每通道高达 2.5Gbps
- 两个视频编码器/解码器模块
- 支持 5.1 级高级的 HEVC (H.265) 主要配置文件
- 支持 5.2 级 H.264 BaseLine/Main/High 配置文件
- 每个模块支持高达 4K UHD 分辨率 (3840 × 2160)
- 每个模块支持 4K60 H.264/H.265 编码/解码(高达 480MP/s)
内存子系统:
高达 8MB 的片上 L3 RAM,具有 ECC 和一致性
- ECC 错误保护
- 共享一致性缓存
- 支持内部 DMA 引擎
多达 4 个带 ECC 的外部存储器接口 (EMIF) 模块
- 支持 LPDDR4 内存类型
- 支持高达 4266MT/s 的速度
- 高达 4x32-b 总线,具有高达 68GB/s 的内联 ECC
通用内存控制器 (GPMC)
MAIN 域中的 512KB 片上 SRAM,受 ECC 保护
符合 AEC-Q100 标准,适用于第 1 季度结束的零件编号变体设备安全性:
具有安全运行时支持的安全启动
客户可编程根密钥,最高 RSA-4K 或 ECC-512
嵌入式硬件安全模块
加密硬件加速器 – 具有 ECC、AES、SHA、RNG、DES 和 3DES 的 PKA高速串行接口:
- 两个端口支持 5Gb、10Gb USXGMII 或 5Gb XFI
- 所有端口均支持 1Gb、2.5Gb SGMII
- 所有端口都可以支持 QSGMII。最多可以启用 2 个 QSGMII 并使用所有 8 个内部通道。1 个 QSGMII 接口使用 4 个内部通道。
多达 4 个 2 L/2 个 4L PCI-Express (PCIe) Gen3 控制器
- 第 1 代 (2.5GT/s)、第 2 代 (5.0GT/s) 和第 3 代 (8.0GT/s)作,具有自动协商功能
一个 USB 3.0 双角色设备 (DRD) 子系统
- 增强的 SuperSpeed Gen1 端口
- 支持 Type-C 切换
- 可独立配置为 USB 主机、USB 外围设备或 USB DRD
以太网
两个 RGMII/RMII 接口汽车接口:
5 个多通道音频串行端口 (MCASP) 模块闪存接口:
嵌入式多媒体卡接口 ( eMMC? 5.1)
具有两个通道的通用闪存存储 (UFS 2.1) 接口
两个独立的闪存接口配置为
- 一个 OSPI 或 HyperBus? 或 QSPI 闪存接口,以及
- 一个 QSPI 闪存接口
系统级芯片 (SoC) 架构:
16nm FinFET 技术
31mm × 31mm、0.8mm 间距、1414 引脚 FCBGA (ALY),支持 IPC 3 类 PCB 布线
27mm × 27mm,间距为 0.8mm,1063 引脚 FCBGA (AND),支持 IPC 3 类 PCB 布线
- 功能安全支持高达 ASIL-D
- 灵活的映射以支持不同的用例
参数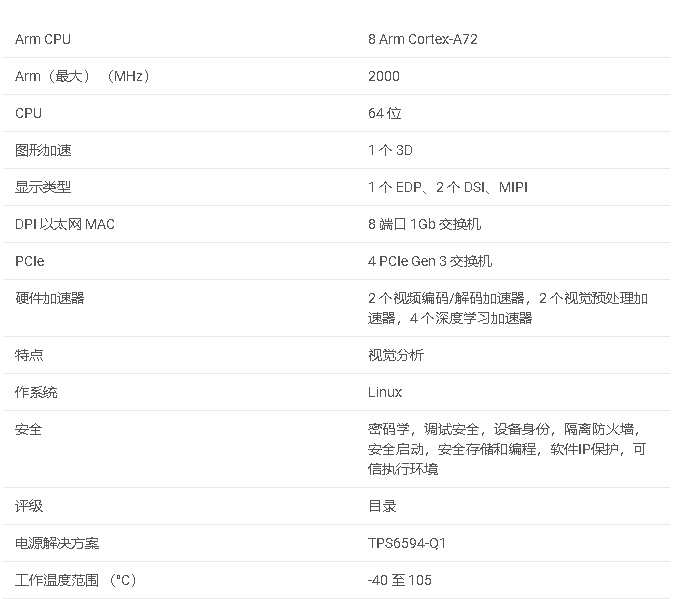
方框图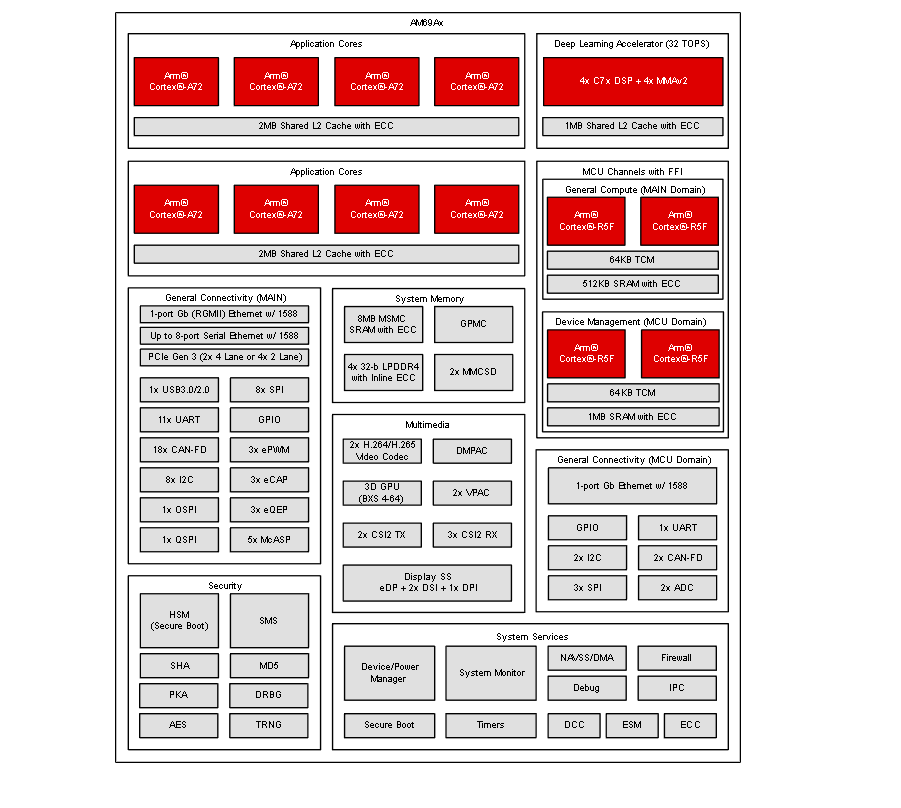
1. 主要特性
- ?高性能计算?:具有高达1.0GHz的通用计算分区,支持设备管理。
- ?内存?:集成512KB的L1 D-Cache、32KB I-Cache和64KB的L2 TCM,所有内存均支持SECDED ECC。
- ?视觉处理?:支持最多两个视觉处理加速器(VPAC),具有图像信号处理器(ISP)和多个视觉辅助加速器,支持高达480MPixel/s的ISP处理速度。
- ?多媒体?:支持DPHY、MIPI CSI 1.3、HEVC (H.265) 和H.264视频编码/解码。
2. 外设与接口
- ?视觉成像子系统?:支持宽动态范围(WDR)、镜头畸变校正(LDC)等功能。
- ?显示子系统?:支持多种颜色格式和分辨率。
- ?通信接口?:包括UART、SPI、I2C、GPIO、McASP、MMC/SD/SDIO、USB、以太网等。
- ?高速接口?:支持PCIe、SGMII、UFS、Hyperbus等高速接口。
3. 安全特性
- ?安全目标?:符合汽车安全完整性等级(ASIL)要求。
- ?设备安全?:提供可选的安全功能。
- ?安全认证?:支持AEC-Q100认证(可选)。
4. 电源管理
- ?独立电源域?:支持独立的MCU和主电源域,便于实现低功耗模式。
- ?电源序列?:提供了详细的电源上电和下电序列指导。
5. 应用领域
6. 开发工具与支持
- ?开发工具?:支持Code Composer Studio IDE、Pin Mux工具等。
- ?支持资源?:提供TI E2E支持论坛、文档和技术参考手册等。
7. 包装与尺寸
- 采用FCBGA封装,具体尺寸和引脚配置根据不同型号有所不同。
8. 注意事项
9. 文档结构
- ?概述?:包括特性、应用、功能框图等。
- ?详细描述?:涵盖处理器子系统、加速器、外设、电源管理、时钟和复位等方面的详细信息。
- ?应用与实施?:提供了布局指导、电源去耦和批量电容器的实施指导等。
- ?文档与支持?:包括设备命名约定、工具和软件、支持资源等。
AM69A处理器是一款功能强大的多核处理器,集成了丰富的外设和接口,适用于多种高性能计算和安全要求严格的应用场景。文档提供了详细的技术规格和应用指南,有助于开发人员实现高效、可靠的解决方案。
-
处理器
+关注
关注
68文章
19935浏览量
236193 -
摄像头
+关注
关注
61文章
4993浏览量
98743 -
机器视觉
+关注
关注
163文章
4603浏览量
123139 -
移动机器人
+关注
关注
2文章
789浏览量
34190 -
应用程序
+关注
关注
38文章
3338浏览量
59134
发布评论请先 登录
资料:移动机器人能否自动充电?
Labview My RIO 移动机器人
机器人、协作机器人和移动机器人,你分的清楚吗
想设计炫酷的移动机器人?视觉定位设计方案分享给你!
【案例分享】机器视觉应用的摄像头设计
家庭移动机器人避障常用传感器及相关技术
如何实现移动机器人的设计?
什么是移动机器人软硬件系统问题
基于SLAM的移动机器人设计
【科普】干货!带你从0了解移动机器人(三) ——自主导航系统及上位机软件设计与实现
移动机器人视觉定位设计方案

视觉导航技术的分类及移动机器人的技术总结
移动机器人的关键技术有哪些





 工商网监
工商网监
评论