 挑战具身机器人协同操作新高度!地瓜机器人邀你共战CVPR 2025双臂协作机器人竞赛
挑战具身机器人协同操作新高度!地瓜机器人邀你共战CVPR 2025双臂协作机器人竞赛

引言
2025年6月,全球计算机视觉与人工智能领域的顶级盛会——CVPR(IEEE/CVF Conference on Computer Vision and Pattern Recognition)将重磅亮相,本届会议聚焦“生成式人工智能时代的多智能体具身系统”,深入探讨人工智能技术的前沿发展与应用。作为CVPR协作智能workshop的核心赛事之一,RoboTwin双臂协作竞赛备受学界关注。
RoboTwin双臂协作挑战赛专注于双臂机器人操作领域,将基于RoboTwin平台进行刚体操作以及触觉操作两个赛道的赛题评测,旨在通过仿真和实战任务推动双臂操作技术的前沿发展。本次竞赛由上海交通大学、香港大学、地瓜机器人多家单位联合主办,地瓜机器人承担了本次赛事中的基础设施建设工作,为参赛团队提供了稳定、高效、并行多卡的仿真评测平台,最多可支持超百支队伍实时在线PK各家的具身操作模型。
亮点速览
难度升级,聚焦真实场景
竞赛基于RoboTwin平台,要求参赛者开发双臂机器人控制策略,完成复杂物体操作任务,如工具使用、物体交接、双臂动作协调等。任务数据融合了真实遥操作数据与数字孪生生成的合成数据,覆盖多样化场景,考验算法在模拟与真实环境间的泛化能力。
技术挑战:需解决双臂运动规划中的动力学干扰、多模态感知融合、任务序列优化等难题。
奖金丰厚,国际影响力加持
参与竞赛的团队不仅获得丰厚奖金,还将在CVPR Workshop现场展示成果,与全球顶尖学者、企业代表直接对话,提升技术影响力,优秀团队还将有机会获得张江集团赴美参赛资助。
First Prize ($1500)
Second Prize ($1000)
Third Prize ($500)
突破限制,在线PK具身模型
本次竞赛的模拟赛环节突破了传统仿真框架强依赖显示器及实体机环境的限制,地瓜机器人云平台为参赛团队提供了稳定、高效、并行多卡的仿真评测平台,最多可支持超百支队伍实时在线PK各家的具身操作模型。本次竞赛的评测平台在竞赛后也将长期对外开放,地瓜机器人作为业内领先的软硬件机器人通用底座提供商,甘愿做好底层赋能,助力改善算法效果验证碎片化的现状,加速具身智能的技术迭代。
参赛攻略
比赛内容
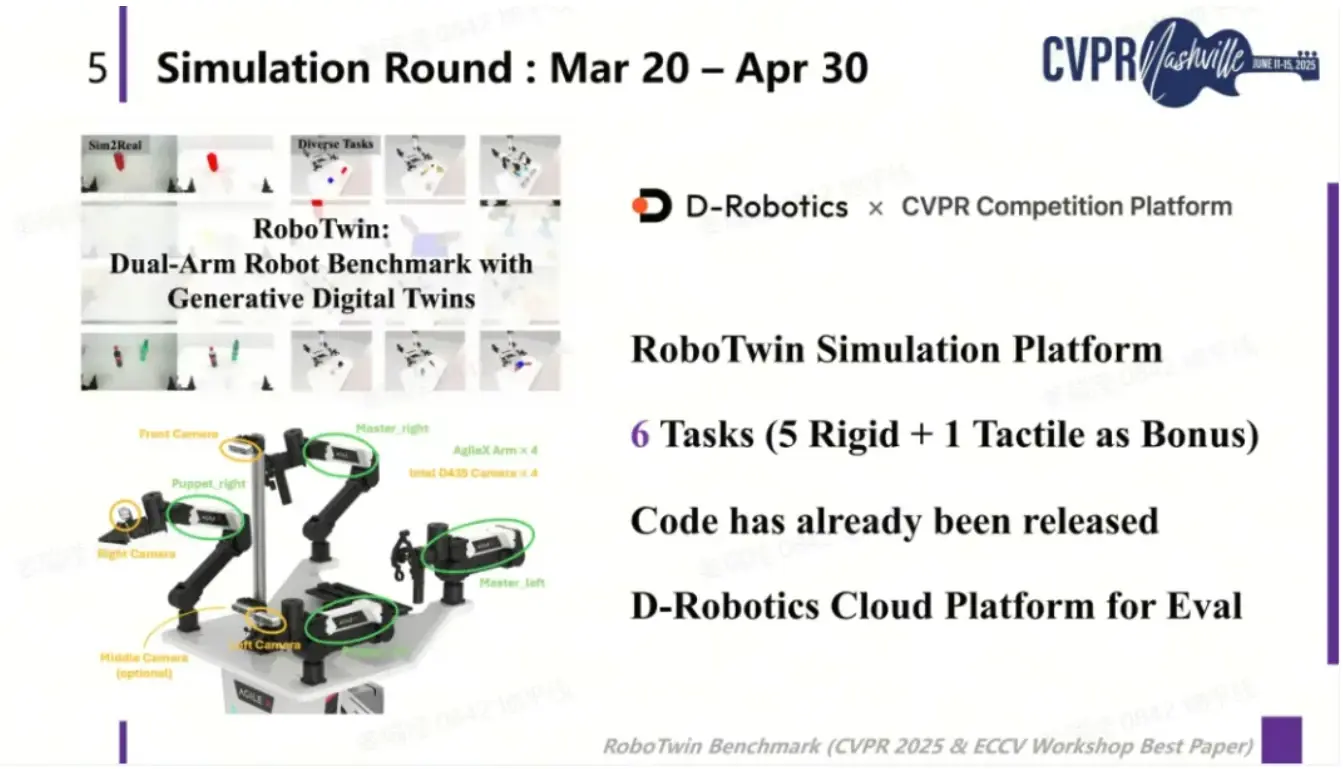
比赛采用RoboTwin仿真平台和Cobot-Magic实体平台,分为模拟赛和线下赛两个阶段,旨在解决模拟和现实世界环境中机器人操作的复杂性问题。模拟赛阶段的刚性物体操作项目着重于对刚性对象的精确操纵,要求参与者开发算法,使机器人能够以受控的方式掌握,移动和与刚性对象进行交互。触觉对象操纵赛道由于团队数量过多和后勤限制已取消报名,作为本次竞赛的bonus项。
第一阶段:模拟赛阶段(2025年3月20日-4月30日)
- 5个刚性物体操作任务,1个触觉操作任务(作为加分项)
- 任务包括:放置杯子、放置鞋子、堆叠碗碟、堆叠积木、投放瓶子等
第二阶段:现实赛阶段(2025年4月30日-6月11日)
- 仅模拟赛中排名前5的队伍可进入现实赛
- 现实赛任务将基于模拟赛任务设计,但在真实环境中进行
评分细则
1)模拟赛评分(总计100分)
- 放置杯子任务(10分):将杯子准确放置在杯垫上
- 放置鞋子任务(20分):第一只鞋子成功放置得6分,第二只鞋子成功放置额外得14分
- 堆叠碗碟任务(20分):堆叠两个碗得6分,堆叠第三个碗额外得14分
- 堆叠积木任务(25分):堆叠两个积木得10分,堆叠第三个积木额外得15分
- 投放瓶子任务(25分):
- 成功投放全部三个瓶子得25分
- 成功投放两个瓶子得12.5分
- 成功投放一个瓶子得5分
- 触觉分类任务(5分额外加分):成功区分矩形体和25面棱柱
2)模拟赛评估方法
- 使用地瓜机器人云平台自动进行评估
- 每个任务进行100次测试(触觉任务10次),取平均分数
- 实时更新排行榜,参赛团队可随时查看排名
3)现实赛评分
- 与模拟赛基本一致,但在真实环境中执行
- 额外考虑以下因素:
- 系统稳定性(10分):在不同光照和物体位置变化下的表现
- 操作精度(10分):机器人抓取和放置的精确度
- 执行效率(10分):完成任务所需的时间
- 系统鲁棒性(10分):应对干扰和不确定性的能力
- 代码质量(10分):代码结构、可读性和可扩展性
4)评分标准细则
- 成功标准:
- 放置任务:物体稳定放置在目标区域中心5cm范围内
- 堆叠任务:上层物体与下层物体接触面积≥60%且保持稳定10秒
- 投放任务:物体完全落入目标容器内部
- 时间限制:
- 每个任务有固定时间限制(90-120秒不等)
- 在时间限制内完成任务的程度决定得分
- 失败条件:
- 物体掉落或损坏
- 机器人与环境发生不安全碰撞
- 超出任务时间限制
5)代码要求
- 必须为端到端策略:从感知到决策到执行
- 不允许使用预设的硬编码动作序列
- 所有代码将被组织者审查,确保符合比赛规则
- 参赛团队需提交可重现的训练和评估代码
- 系统应能适应初始位置和物体摆放的随机变化
6)综合评分计算
- 模拟赛总分 = 五项任务得分总和(100分)+ 触觉任务加分(5分)
- 现实赛总分 = 任务完成度(100分)+ 系统性能评估(50分)
- 最终排名依据现实赛总分确定,模拟赛成绩将作为参考
比赛日程
比赛阶段
时间
报名开始
2025.3.20-2025.04.16
仿真平台赛第一轮
2025.03.20-2025.04.30
晋级队伍公布
2025.04.30
仿真平台第二轮/现实赛开始
2025.04.30
真机评测赛代码提交截止
2025.06.03
仿真平台第二轮结束
2025.06.11
真机评测比赛
2025.06.11-2025.06.15
-
机器人
+关注
关注
213文章
29777浏览量
213175 -
人工智能
+关注
关注
1807文章
49056浏览量
250080 -
协作机器人
+关注
关注
2文章
515浏览量
30660 -
地瓜机器人
+关注
关注
0文章
26浏览量
147
发布评论请先 登录
乐聚机器人与地瓜机器人达成战略合作,联合发布Aelos Embodied具身智能

海伯森技术推动机器人感知能力迈向新高度

【「具身智能机器人系统」阅读体验】2.具身智能机器人的基础模块
《具身智能机器人系统》第10-13章阅读心得之具身智能机器人计算挑战
【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型
【「具身智能机器人系统」阅读体验】1.初步理解具身智能
【「具身智能机器人系统」阅读体验】1.全书概览与第一章学习
【「具身智能机器人系统」阅读体验】+初品的体验
《具身智能机器人系统》第1-6章阅读心得之具身智能机器人系统背景知识与基础模块
地瓜机器人发布一系列通用机器人套件
地瓜机器人与广和通深度合作,共驱智能机器人商用落地

地瓜机器人与广和通深度合作,共驱智能机器人商用落地






 工商网监
工商网监
评论