 国产化人形机器人原地侧空翻,其中涉及到哪些MOS?
国产化人形机器人原地侧空翻,其中涉及到哪些MOS?

行业背景
前几天宇树G1机器人实现了侧空翻动作并保持了平衡,这种侧空翻需要克服旋转带来的非对称角动量分布问题,实验数据显示腾空阶段角加速度峰值达180 rad/s,着陆冲击力达4.5倍自重,对关节驱动系统爆发性和轻量化要求更高!其核心零部件国产化率超90%,成本较进口压缩40%,恭喜中国企业以电驱降本实现弯道超车!今天合科泰为您讲解人形机器人模块构成及其涉及到的MOS管是如何为机器人侧空翻完成能量转换的。
机器人关节模组构成
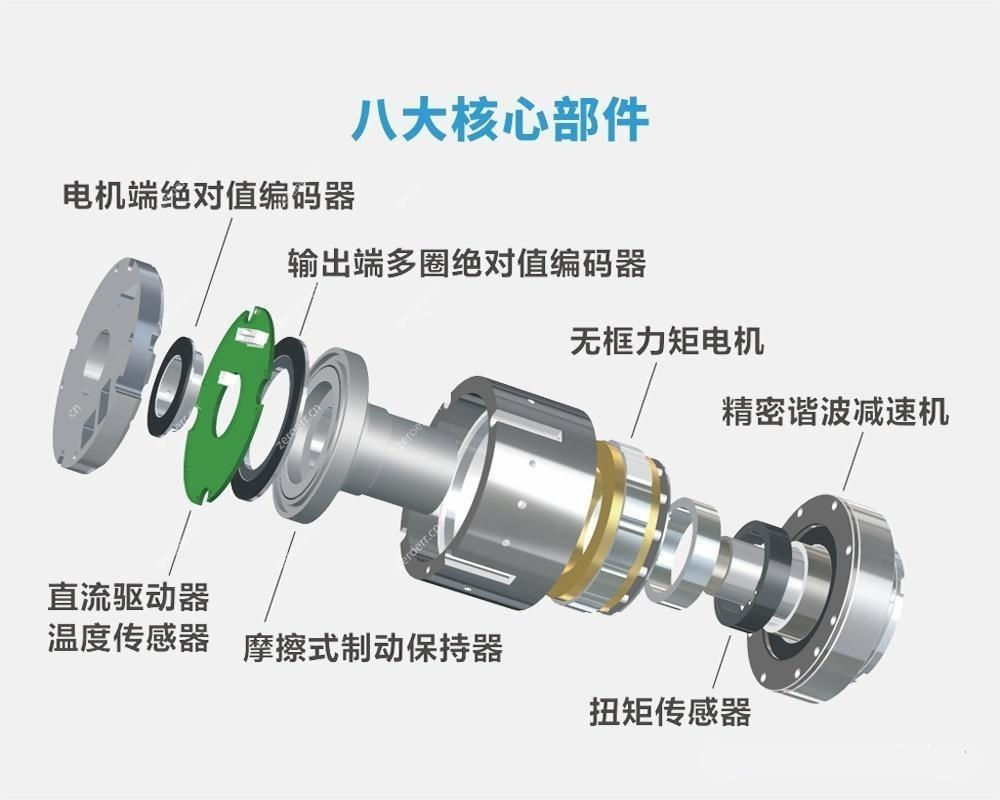
人形机器人机器人关节模块正向“高集成、高动态、低时延”方向发展,核心在于电机、减速器、传感器的协同优化,关节模组有八大核心部件(如图),包括电机端绝对值编码器、直流驱动器温度传感器摩、输出端多圈绝对值编码器、摩擦式制动保持器、无框力矩电机、扭矩传感器、精密谐波减速机。
伺服系统负责驱动机器人的运动,由伺服驱动器和伺服电机组成。其中,伺服驱动器负责位置、速度、转矩等各项控制;伺服电机是伺服系统中控制机械元件运转的发动机,将接收到的电压信号转化为转矩和转速,以驱动控制对象。
MOS管应用
1、电机控制:
侧空翻离地瞬间髋膝关节在10ms内输出峰值扭矩,有高瞬时功率要求,作为电机核心驱动的MOS需具备低导通电阻(RDS(on) <1mΩ)和高电流耐受(>500)能力;且关节电机的动态响应需求,需要控制周期缩短至毫秒级,MOS的开关频率需达100kHz以上才能满足其快速切换响应需要;最后散热和可靠性对电机控制也很重要。
2、电源管理:
侧空翻时电池瞬间放电功率可达到50kW,通过同步整流的MOS关可实现电流转换效率提升;通过MOS的智能开关矩阵,可优先向关键关节分配能量,以确保动作连贯性;而在母线电压波动时(如±20V),TVS-MOS集成保护快速关断MOS管,可防止过压击穿驱动电路。
3、信号保障:
惯性测量单元(IMU)、力矩传感器等使用低阈值MOS,可减少采集噪声,确保反馈精度;传感器通过LVDS接口对数据融合处理,满足实时控制需求。
合科泰自研MOS管导通损耗相较进口产品降低15%,在电机控制、电源管理、信号保障方面都有性能良好的MOS管。
-
MOS
+关注
关注
32文章
1366浏览量
97289 -
智能机器人
+关注
关注
17文章
901浏览量
84597 -
MOSFET管
+关注
关注
1文章
28浏览量
9960 -
人形机器人
+关注
关注
7文章
750浏览量
17673 -
合科泰
+关注
关注
3文章
127浏览量
747
发布评论请先 登录
全球首次!中国机器人原地侧空翻,打破技术壁垒
对话:人形机器人连接器与线缆有何攻关点?


六维力传感器助力人形机器人感知世界
EtherCAT科普系列(4):EtherCAT技术在人形机器人灵巧手领域应用

深圳发力机器人AI芯片攻关,万年芯助推国产化替代

未来已来,2025人形机器人量产启航!泰科机器人成功斩获近千万订单

短讯:全球首个!人形机器人技术新突破
机器人看点:宇树科技王兴兴回上海母校 加速商业化落地 宇树机器人二手租赁火爆
春晚后人形机器人升级,惊呆网友:中国的AI技术不可想象
伺服电动缸在人形机器人中的应用
人形机器人全景产业链大梳理!

人形机器人爆火,电机系统的下一个万亿级蓝海






 工商网监
工商网监
评论