 Unitree B2-W机器狗展现新技能:晶振在四足机器人中的关键作用
Unitree B2-W机器狗展现新技能:晶振在四足机器人中的关键作用

一、机器狗技术的新飞跃
随着人工智能和机器人技术的飞速发展,机器狗(四足机器人)逐渐从实验室走向商业应用,引发了越来越广泛的关注。
12月23日,宇树科技发布了Unitree B2-W机器狗的最新视频,并配文称:“在发布量产一年后,Unitree B2-W工业轮足,觉醒了更多天赋技能!”。视频显示,Unitree B2-W机器狗采用了“轮+足”式设计,可以完成原地转体两周接倒立转体三周半、托马斯全旋、侧空翻、360°跳跃转体等高难度动作。此外,Unitree B2-W机器狗能够在陡峭的山坡、浅水道路、逆行溪流等复杂场景中行走自如,甚至能够承载一名成年男子越野前行。
 机器狗
机器狗Unitree B2-W机器狗的卓越性能和创新技术,为未来的机器狗发展与应用提供了更多可能性。例如,在工业应用领域,可以进行日常监测、检测和搬运工作;在公共安全领域,可以用于环境检测、物体检测和气味检测等安全防范工作;在自然灾害区域,凭借自主导航、避障和生命探测等技术,可以协助进行搜救、搬运等任务;在物流领域,能够在仓库、港口等复杂环境中搬运货物,提高物流效率;随着技术的不断升级和应用场景的不断拓展,机器狗有潜力在更多领域大展身手。
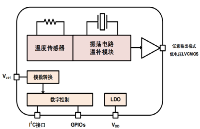
机器狗的优异表现离不开内部复杂多样的组成元件,晶振就是其中的一个关键组件。晶振的作用是提供稳定且可靠的时钟信号,以保证机器狗系统的同步、稳定性和数据传输的准确性。由于机器狗通常应用在户外或温度变化较大的场景,复杂多变的应用场景对其晶振品质和稳定性提出了严格要求,为了减少环境变化对机器狗的影响并保证其正常运作,通常会采用温度补偿振荡器(TCXO),以确保在较大温度变化的环境中输出稳定且高精度的时钟信号。除了TCXO温补晶振,32.768KHz晶振也是机器狗设计中的常用选择,用于产生稳定的时序基准信号,保证系统时间的准确性。
晶振广泛应用于机器狗的各个模块,包括但不限于:
1、MCU模块:晶振能够提供稳定的时钟信号,确保控制单元运行的稳定性和精确性
2、WiFi模块:晶振用于提供高精度的时钟信号,保证无线通信的同步和稳定
3、姿态传感器(陀螺仪/加速度计等):晶振提供稳定的时钟信号,用于同步数据采集
4、蓝牙模块:晶振提供时钟信号,以保证通信的稳定性与数据传输的准确性
YXC提供高精度、高准确度的时钟晶振,为机器狗的卓越性能提供了重要的技术支持,助力其在各个领域大放异彩。
二、YXC提供“机器狗”解决方案
机器狗需要在多变的气候和温度条件下保持高度的稳定性和精确性。温补晶振通过内置的温度补偿电路,能够减小环境温度变化对振荡频率的影响,从而确保设备在不同温度下均能提供稳定的频率参考信号。
YXC推荐三款温补晶振(TCXO)产品,用以满足不同方案需求:
1、通用系列
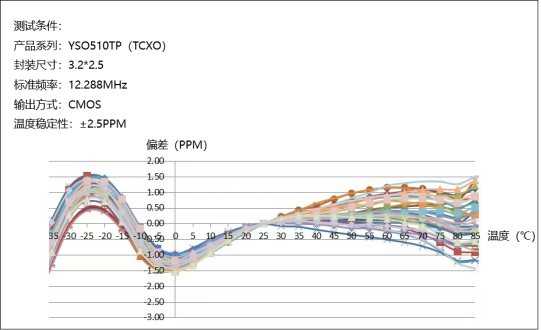
YSO510TP:在-40~85℃的温度范围内,稳定性可达±2.5PPM,具备多种尺寸。
2、预编程系列
YSO511PJ:可在10~250MHz范围内自由定制频率。
3、高精度系列
YSO512ET:具备超高精度,温度稳定性最高可达±0.1PPM。
· 通用TCXO系列:YSO510TP
 温补晶振
温补晶振YSO510TP为通用系列TCXO。可选频率范围为10~52MHz、尺寸最小可达2.0 x 1.6mm、具备CMOS与Clipped sine wave两种输出方式。在-30~85℃的工作温度范围内,温度稳定性(典型值±2.5PPM,最小值±0.28PPM)。以下为产品实测数据:
 产品实测数据
产品实测数据YSO510TP
温度稳定性测试曲线图
测试结果:在-30~85℃的工作温度范围内,测试样品的温度稳定性满足≤±2.5PPM
· 预编程TCXO系列:YSO511PJ
YSO511PJ产品参数
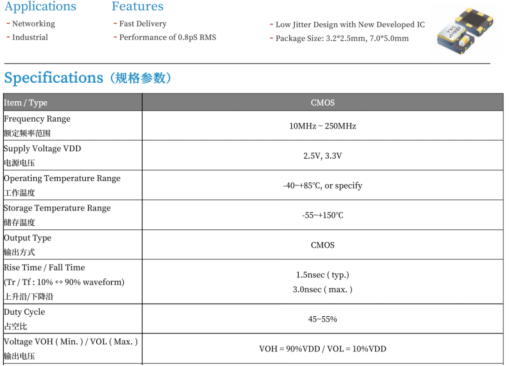
YSO511PJ为预编程TCXO。在-40~85℃的工作温度范围内,温度稳定性≤±2.5PPM、输出方式为CMOS。该产品可满足10~250MHz范围内任意频率定制,适用于特殊频率需求方案。
 可编程温补晶振
可编程温补晶振· 高精度TCXO系列:YSO512ET
YSO512ET产品参数
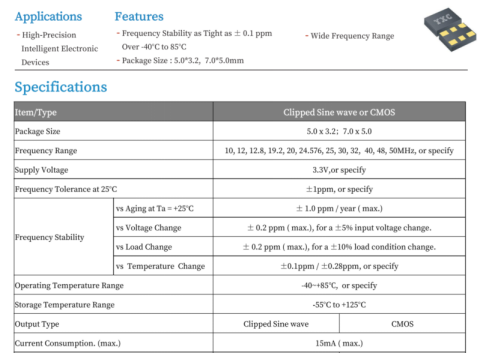
YSO512ET为高精度TCXO。适用于10-50MHz范围内的常规频点、封装尺寸为5.0*3.2、7.0*5.0mm、具备CMOS与Clipped sine wave两种输出方式。该产品在-40~85℃工作范围内,温度稳定性最高可达±0.1PPM。
 高精度温补晶振
高精度温补晶振· 32.768KHz谐振器
YXC 提供的 32.768KHz
高精度时钟晶振,能够为机器狗的嵌入式系统提供稳定的时钟时序信号,确保其在各种环境下的控制精度和可靠性。市场主流采用32.*1.5mm封装,YXC同步提供2.0*1.2mm与1.6*1.0mm的小尺寸32.768KHz谐振器,助力多样化机器狗方案设计。
 32.768KHz谐振器
32.768KHz谐振器-
机器人
+关注
关注
213文章
29829浏览量
213605 -
晶振
+关注
关注
35文章
3280浏览量
70518 -
四足机器人
+关注
关注
1文章
94浏览量
15496 -
温补晶振
+关注
关注
1文章
359浏览量
11084
发布评论请先 登录
晶振在机器人中的核心作用
机器人看点:越疆机器人正式发布六足仿生机器狗 智元公布机器人运动控制模型专利
晶振在机器人领域的应用
年出货约2万台!中国厂商主导全球四足机器人市场


探讨 GaN FET 在人形机器人中的应用优势
伺服电动缸在人形机器人中的应用
四足机器人的结构、控制及运动控制

四足巡检机器人特点和作用是什么

变速齿轮在机器人中的使用
PID控制在机器人中的应用案例
在NVIDIA Isaac Lab中训练四足机器人运动






 工商网监
工商网监
评论