 家里乱成“垃圾场”,树莓派也能一键搞定家务了?
家里乱成“垃圾场”,树莓派也能一键搞定家务了?

在科技飞速发展的今天,我们的生活正逐渐被各种智能设备所改变。今天,就来给大家介绍一个超酷的科技组合——树莓派+myCobot机械臂!这个组合不仅能让你体验到科技的魅力,还能为你的生活带来无限可能。
一、树莓派+机械臂,科技界的“梦幻组合”
树莓派,这款小巧而强大的单板计算机,一直以来都是科技爱好者的宠儿。而myCobot机械臂,作为一款高性能的六轴机械臂,更是凭借其灵活的操控性和强大的功能,赢得了众多科技迷的喜爱。当树莓派遇上myCobot机械臂,会擦出怎样的火花呢?

myCobot机械臂自带Ubuntu系统,支持ROS开发环境,还配备了图形化编程工具RobotFlow,即使是编程小白,也能通过简单的拖拽操作,快速上手。而树莓派的强大社区支持,能让你轻松找到各种教程和案例。
二、树莓派+机械臂,生活中的“创意魔法师”
树莓派+myCobot不仅是一个家务助手,更是一个充满创意的“魔法师”。你可以通过简单的编程,让它实现各种有趣的创意功能。比如:
1. 猫互动机器人:和宠物一起玩耍
一名日本用户通过编程让myCobot模仿猫咪的玩耍动作,吸引了日本媒体Fuji News Network和Yahoo Japan的报道。想象一下,当你忙碌的时候,机械臂可以和你的宠物互动,逗得它们乐此不疲。这不仅解决了宠物无聊的问题,还能让你的生活充满乐趣。

2. 悬浮盒投影:打造家庭科技秀
通过在myCobot上安装投影仪,结合人脸检测和激光扫描技术,可以创建一个看起来悬浮在空中的盒子幻觉。这种创意不仅适合家庭娱乐,还能在派对上成为全场焦点,让你瞬间变身“科技达人”。
3. 天花板机器人:灵活安装,随心所欲
一名用户将myCobot倒挂在天花板上,探索家庭机器人的概念。这种灵活的安装方式,不仅节省空间,还能让机械臂随时为你服务。比如,它可以帮你拿东西、整理桌面,甚至还能在你睡觉时自动关灯。
三、手眼标定,精准抓取的关键
为了让机械臂能够精准地识别和抓取物体,手眼标定是必不可少的一步。通过手眼标定,机械臂可以准确地将深度相机的坐标系统与自身坐标系统对齐,从而实现精准的视觉引导和抓取。具体步骤如下:
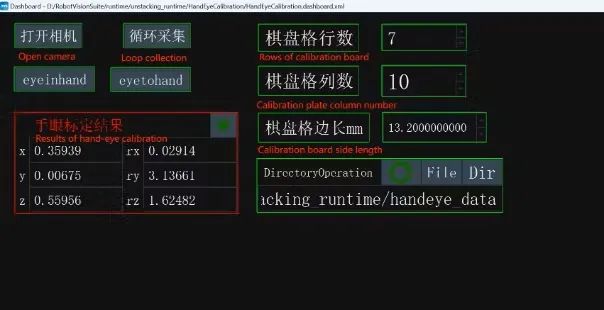
1. 准备标定板
选择一个黑白棋盘格作为标定板,其几何结构非常规则,边缘和角点位置可以准确计算和建模,这使得标定算法能够准确估计相机与棋盘格之间的几何关系。
2. 固定深度相机和机械臂
将深度相机固定在机械臂上,确保相机的位置不会随着机械臂的运动而改变。

3. 匹配特征点
将标定板放置在相机的视野内,并多次旋转标定板以捕获提供丰富视觉信息的图像。对于每个标定板图像,使用角点检测算法提取网格线交点的坐标特征。
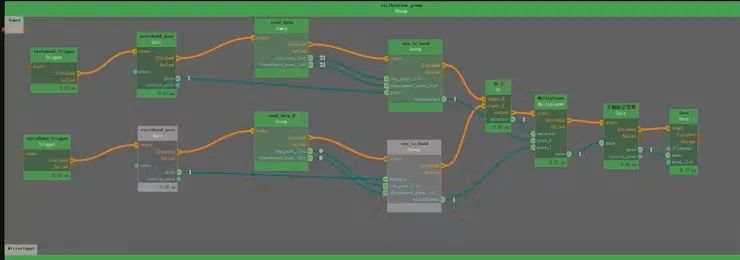

4. 计算标定坐标
获取不同角度和位置的20组特征点数据,然后使用RVS提供的算法计算手眼标定值,并记录手眼标定结果,以便后续在机械臂坐标系统和相机坐标系统之间进行转换。
四、物体检测与识别,智能抓取的基础
在完成手眼标定后,接下来就是让机械臂学会识别目标物体。以木块为例,具体步骤如下:
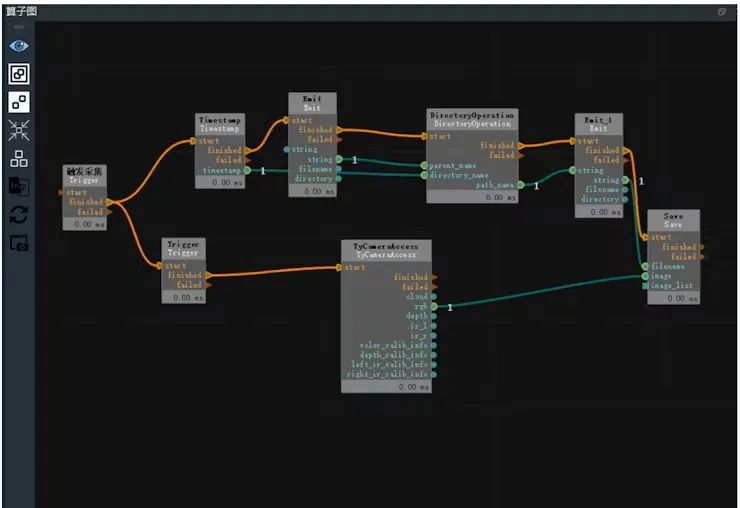
1. 收集图像
使用深度相机收集木块的图像,并将它们保存在指定路径下。收集的图像越多,数据越准确。
2. 安装LabelMe
安装必要的Python库以使用LabelMe进行图像标注。
pip install PyQt5pip install labelme
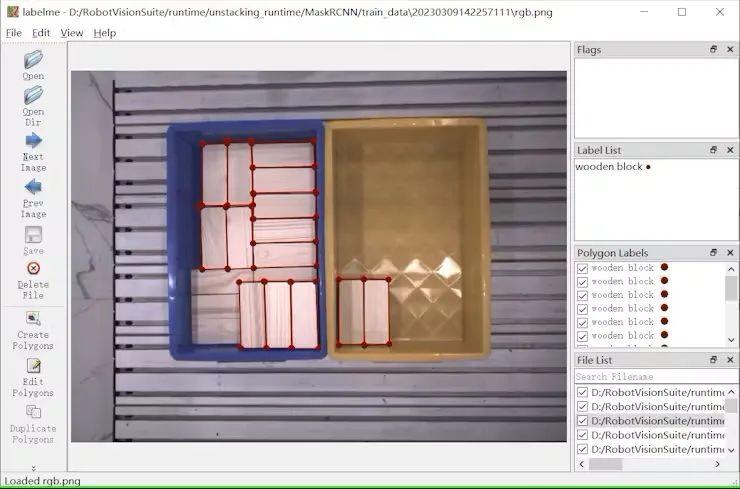
3. 标注过程
打开LabelMe,找到保存图像的路径,然后点击“Create Polygons”绘制红色边界框,将木块标注出来。给标注结果命名,例如“wooden block”,并重复此步骤标注所有收集的图像。
4. AI推理
将标注好的图像提交给RVS的AI训练功能,生成训练输出文件夹,从中获取标注数据的权重文件。通过AI推理,训练好的模型可以应用于实际场景,处理新的输入数据并生成相应的输出结果。
五、机械臂路径规划,实现高效抓取
在识别到物体后,机械臂需要规划运动路径以到达抓取点。具体步骤如下:
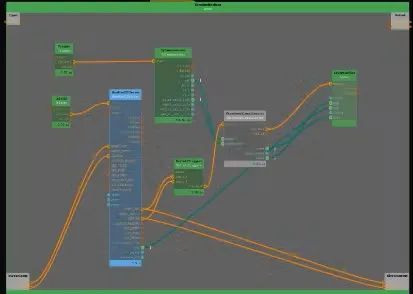
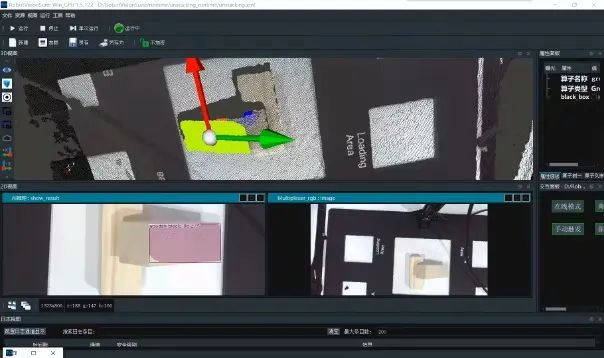
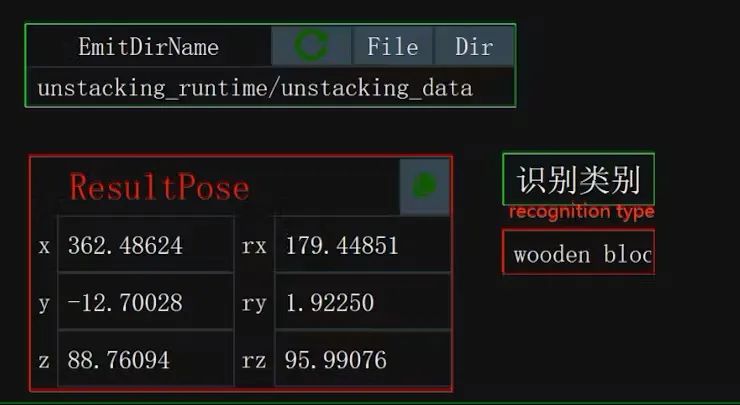
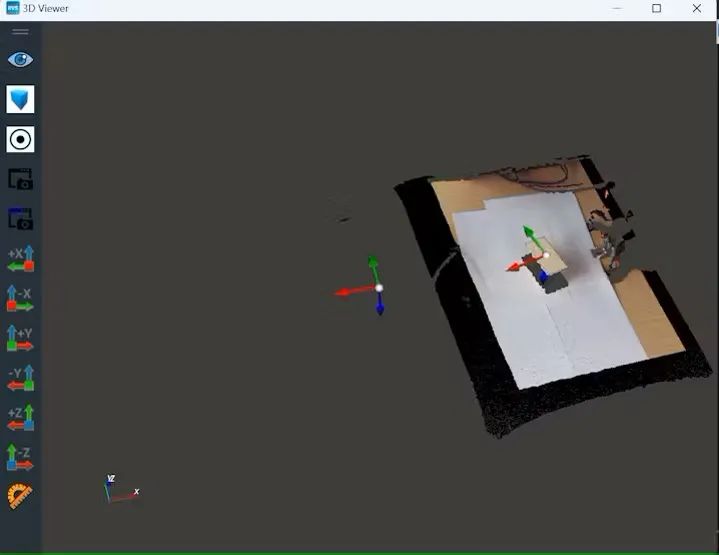
1. 获取物体坐标
通过深度相机返回的3D坐标,获取木块相对于机械臂的坐标。
2. 计算末端执行器姿态
使用以下代码计算末端执行器的姿态:
import numpy as np# 转换旋转矩阵和欧拉角def CvtRotationMatrixToEulerAngle(pdtRotationMatrix): pdtEulerAngle = np.zeros(3) pdtEulerAngle[2] = np.arctan2(pdtRotationMatrix[1,0], pdtRotationMatrix[0,0]) fCosRoll = np.cos(pdtEulerAngle[2]) fSinRoll = np.sin(pdtEulerAngle[2]) pdtEulerAngle[1] = np.arctan2(-pdtRotationMatrix[2,0], (fCosRoll * pdtRotationMatrix[0,0]) + (fSinRoll * pdtRotationMatrix[1,0])) pdtEulerAngle[0] = np.arctan2((fSinRoll * pdtRotationMatrix[0,2]) - (fCosRoll * pdtRotationMatrix[1,2]), (-fSinRoll * pdtRotationMatrix[0,1]) + (fCosRoll * pdtRotationMatrix[1,1])) return pdtEulerAngledefCvtEulerAngleToRotationMatrix(ptrEulerAngle): ptrSinAngle = np.sin(ptrEulerAngle) ptrCosAngle = np.cos(ptrEulerAngle) ptrRotationMatrix = np.zeros((3,3)) ptrRotationMatrix[0,0] = ptrCosAngle[2] * ptrCosAngle[1] ptrRotationMatrix[0,1] = ptrCosAngle[2] * ptrSinAngle[1] * ptrSinAngle[0] - ptrSinAngle[2] * ptrCosAngle[0] ptrRotationMatrix[0,2] = ptrCosAngle[2] * ptrSinAngle[1] * ptrCosAngle[0] + ptrSinAngle[2] * ptrSinAngle[0] ptrRotationMatrix[1,0] = ptrSinAngle[2] * ptrCosAngle[1] ptrRotationMatrix[1,1] = ptrSinAngle[2] * ptrSinAngle[1] * ptrSinAngle[0] + ptrCosAngle[2] * ptrCosAngle[0] ptrRotationMatrix[1,2] = ptrSinAngle[2] * ptrSinAngle[1] * ptrCosAngle[0] - ptrCosAngle[2] * ptrSinAngle[0] ptrRotationMatrix[2,0] = -ptrSinAngle[1] ptrRotationMatrix[2,1] = ptrCosAngle[1] * ptrSinAngle[0] ptrRotationMatrix[2,2] = ptrCosAngle[1] * ptrCosAngle[0] return ptrRotationMatrix# 路径规划defcompute_end_effector_pose(current_pose, tool_pose): current_rotation = current_pose[:3,:3] current_translation = current_pose[:3,3] tool_rotation = tool_pose[:3,:3] tool_translation = tool_pose[:3,3] new_rotation = np.dot(current_rotation, tool_rotation) new_translation = np.dot(current_rotation, tool_translation) + current_translation new_pose = np.eye(4) new_pose[:3,:3] = new_rotation new_pose[:3,3] = new_translation return new_pose
3. 控制机械臂移动
根据计算出的末端执行器姿态,控制机械臂移动到目标位置并抓取物体。
六、未来生活,从树莓派+机械臂开始
树莓派+myCobot机械臂不仅是一个科技玩具,更是一个通往未来生活的窗口。它支持多种传感器和执行器的扩展,可以实现复杂的功能。比如,你可以让它配合摄像头,实现颜色识别和追踪;或者让它和语音助手结合,通过语音指令完成任务。这个组合就像一个神奇的盒子,等着你去探索更多的可能性。
七、总结
树莓派+myCobot机械臂的组合,不仅能为你的生活带来便利,还能让你体验到科技的魅力。它就像一个“创意魔法师”,为你的生活增添无限乐趣。如果你也想让生活变得更有科技感,那就赶紧行动起来吧!让我们一起用树莓派和myCobot机械臂,开启未来生活的新篇章!你还在等什么?快去试试吧!
-
嵌入式
+关注
关注
5158文章
19730浏览量
318606 -
机械臂
+关注
关注
13文章
556浏览量
25439 -
树莓派
+关注
关注
122文章
2031浏览量
107667
发布评论请先 登录
用树莓派“揪出”家里的耗电怪兽!

都市生活一键搞定
树莓派pico入门学习笔记(一)相关资料推荐
如何给树莓派添加开、关机键
S7-200 PLC在垃圾场CMF膜污水处理系统中的应用
树莓派也出MCU了?树莓派Pico来了!

树莓派pico入门学习笔记(一)
树莓派+Balena OS:一键解锁智能硬件新技能!





 工商网监
工商网监
评论