 2025的机器人控制芯片,已经发展到何种程度了?
2025的机器人控制芯片,已经发展到何种程度了?

本文作者黄烨锋
ASPENCORE 资深产业分析师,常驻上海,专注成像、移动与半导体,热爱理论技术研究。
从去年开始,电子工程专辑对机器人的关注度明显增加了:主要是因为这个领域渐有爆发之势。黄仁勋在去年的不止一个场合都说过机器人即将迎来“ChatGPT时刻”,NVIDIA眼中在生成式AI之外的下一个爆点就是机器人;
行业内像ROSCon这样的机器人开发者大会越来越火;宇树科技机器人亮相春晚扭秧歌,特斯拉擎天柱机器人叠衣服等引发极大关注......这些都让人感觉机器人正在以前所未有的速度发展。
这就给作为机器人底层动力的芯片,提供了巨大的市场机会。在最近先楫半导体与好上好信息共同举办的“共话机器人,智链未来”新春茶话会上,先楫半导体方案及FAE总监余国民把人形机器人的核心构成分成了4部分:
(1)大脑决策层——包括现在常说的AI大模型,及复杂决策——这也是过去一年我们关注得最多,NVIDIA常说的“3台机器人”的机会点;
(2)运动控制-即机器人“身体”,包括动力系统、运动控制系统、关节结构、灵巧手等;
(3)环境感知,相当于机器人的感官,涵盖各种传感器;
(4)实时通信,余国民称其为机器人的“神经”,相关于机器人内部各组成部分的互通互联,他还强调了机器人这部分的可靠性和稳定性要求。

“机器人身上的部件、芯片很多。”余国民说,“先楫半导体除了大脑没有涉足,其他部位我们都有。比如运动控制、关节这部分是我们的强项;实时通信这块,我们有工业以太网芯片,也在探索TSN的可能性”;“而像我们的HPM5300系列芯片尺寸小、算力高,很适合做传感器后端的控制处理芯片”。
目前先楫半导体在国内的机器人领域已经累积了过百家客户,“有做整机的,也有做供应链的”,“有做协同机械臂的、人形机器人的、机器狗的等等”,“很多都已经实现了量产”。基于先楫半导体目前在机器人领域的涉足广度,及已经有不少落地产品,这也成为我们理解当前机器人技术发展需求及现状的绝佳窗口。
01
机器人主控芯片的5个要求和趋势
先楫半导体执行副总裁、市场销售负责人陈丹在活动开场致辞中提到芯片赋能机器人发展体现在“5个高度”上,分别是高算力、高性能运动控制、高实时性通信、高集成度、高安全性。先楫半导体产品总监费振东也将这5点视作机器人对主控芯片的要求及发展趋势,是先楫“在机器人行业与我们的客户交流和沟通过程中体会到的”。
第一,高算力。“机器人未来会走向各个行业,走进千家万户。社会大众对其功能预期很高。”费振东在演讲中说,“出色的功能和运动能力都离不开高算力的CPU,这样才能让复杂算法落地。”
除了通常我们说节点内要求达成高实时响应的ADC采集、FFT加速等功能特性也属于高算力范畴,这一点的关键自然就是MCU核心的控制和处理速度。余国民举例说先楫的HPM6E00系列MCU凭借其卓越性能,CPU计算电流环延迟可实现1.06μs,以往要达到这一级别的性能,通常需要依赖FPGA或是国外大厂芯片的快速电流环技术。
与此同时,VSC(坐标变换)+ CLC(环路计算)+ PWMv2多模块构成的硬件电流环也显著减少了关节伺服电流环计算延时(可达数百纳秒),满足对电流环更高的快速响应需求。这套方案是在“高算力”的前提下“兼顾灵活性和便捷性”。这应该算是体现“高算力”机器人控制芯片属性的典型了。

第二,高性能运动控制。主流机器人机械运动执行,目前都以伺服电机结构为主,尤其是常见的人形机器人和机器狗——一个动作需要很多电机组合完成。这就要求主控芯片具备很强的运动控制能力。机器人躯体的运动,包括各关节的不同轴向运动组合完成复杂任务,这是机器人与物理世界交互的基础。
虽然机器人的关节驱动看起来和工业领域的传统伺服驱动很相似,但通常机器人要求更快的响应速度,包括力矩环、电流环的响应要求;同时机器人不少关节较小,也就要求更高的功率密度和集成度;而且机器人一般为电池供电,更要求考虑效率问题。
几名发言人都强调运动控制是先楫的绝对强项,“无论是各个关节的伺服,还是灵巧手”,“我们都已经有相关产品落地”。
第三,高实时性的同步通讯。如前所述,机器人全身有大量关节、部件,“一些比较大的机器人身上有少则几十,多则上百个自由度(能够独立运动的关节数量);每个自由度都意味着一个运动控制的执行机构。几十上百个电子控制器协同完成各种动作。”费振东表示,“这就需要机器人全身的各个组件高度协调,因而对主控芯片提出了高实时同步需求。”
这应当也是先楫目前正寻求突破的技术点:比如说在通信技术方面,对于目前在工业和机器人领域都很火的EtherCAT网络,陈丹特别提到了先楫半导体的HPM6E00系列“是国内首个拿到德国倍福(Beckhoff)正式授权的EtherCAT从站控制器高性能MCU”,“这原本是个常年被海外企业占据的市场,很高兴中国芯片2023年也在这个领域有了一席之地。”
第四,高集成度与小型化。受限于机器人本身的尺寸,需要在有限空间内完成电子系统设计,留给芯片及对应的元器件的空间就更小。“我看到国内已经有一些客户将几块板子叠在一起,每块板子上面都有MCU、FPGA,还有网络连接所需的部分等等都放在一起。”
“人形机器人很多关节要求小尺寸,靠近手、脚的末端尺寸可能就变得非常小。”针对系统的高集成度和小型化提出了要求。活动现场甚至有工程师在QA环节提到希望先楫能尽快推出便于实现更小型化系统的芯片产品,先楫则表示相关新产品已经就绪即将发布。
余国民说先楫现在的解决方案是将“原本所需的5颗芯片集成在一起”,另外集成脉冲、模拟、通讯类编码器接口——“尤其编码器接口,可以兼容所有主流绝对式编码器;如BiSSC,不需要另外再用一颗芯片;还有芯片内集成的旋变解码单元是很多工业领域的客户需要的。”

第五,高安全与高可靠性。除了可靠与稳定性这类基本需求,考虑未来机器人在各行各业乃至普通家庭的普及,机器人作为先进电子系统,未来必然会成为网络攻击的目标。所以信息安全也需要提上日程。
02
对于这5点,先楫的对应方案
着眼这5点,自然与先楫本身的业务和技术方向有极大关联——前文多少也已经提到。“公司成立之初,我们对产品的设想就和这几点有着很高的重合度。”对先楫的机器人MCU芯片有进一步的认识,也有助于我们理解当代机器人MCU具体是什么样的。
在高算力的问题上,先楫认为虽然国内进入MCU赛道的企业不少,但大多集中在“入门和主流”定位,“高性能MCU仍然是薄弱环节”。
下面这张图是目前先楫的MCU产品矩阵,横轴为管脚数,纵轴为性能划分。费振东说即便是主流定位的HPM5300系列,“虽然在先楫被定位在入门级,但它仍然达到了480MHz的主频,覆盖48-100脚”;而中间高性能定位的“HPM6200和HPM6300系列广受用户好评”;更不用说高端定位的HPM6700, HPM6800和HPM6E00系列。

以先楫2022年推出的首个HPM6750系列芯片为例——集成2个816MHz主频的RISC-V核,就已经着眼在了高性能领域。“即便是2、3年后的现在,相比国际厂商后续推出的更高性能的产品,我们的这款产品在性能上也丝毫不逊色。”从CoreMark跑分及芯片集成度的角度,都优于同级别的竞品。
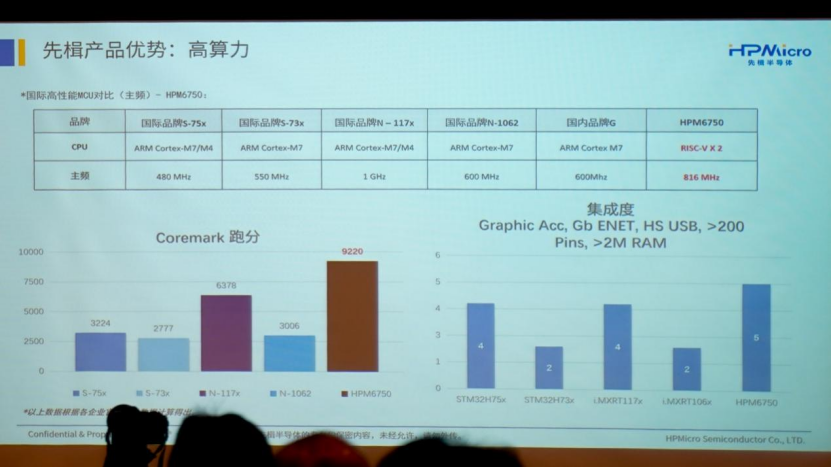
以先楫2022年推出的首个HPM6750系列芯片为例——集成2个816MHz主频的RISC-V核,就已经着眼在了高性能领域。“即便是2、3年后的现在,相比国际厂商后续推出的更高性能的产品,我们的这款产品在性能上也丝毫不逊色。”从CoreMark跑分及芯片集成度的角度,都优于同级别的竞品。
而优秀的运动控制能力,被先楫的几名发言人反复提及。“从2023年下半年发布的HPM5300系列开始,先楫的MCU集成了功能相当强的运动控制系统,受到了广泛的用户好评。费振东谈到了先楫特有的,且广受客户好评的精确运动控制系统,如下图所示。
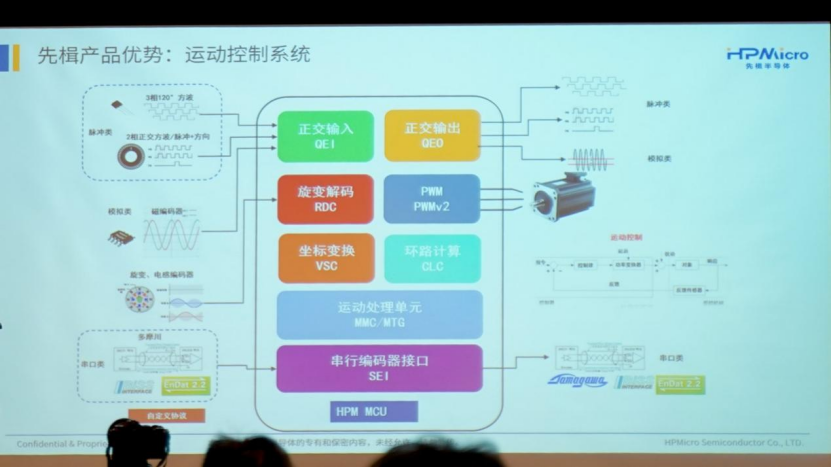
“此外,芯片上也集成了硬件控制环路计算单元……”“所有这些模块都进一步降低了CPU负载,把基于先楫产品设计的电机驱动器、运动控制器性能都推到了全新高度。”
通讯能力方面,具体到先楫的MCU产品,表现在提供比较丰富的通讯接口——下图以HPM6E80为例,框出了通信资源;与此同时,,先楫认为随着机器人技术的持续深入发展,机器人需要性能更强、实时性更高的网络通信协议。
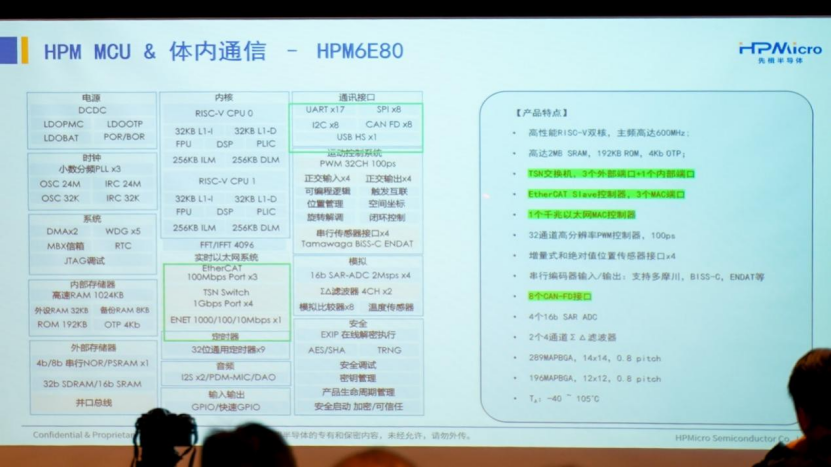
除了前文已经提到HPM6E80作为率先在国内获得倍福(Beckhoff)正式授权的EtherCAT从站控制器高性能MCU支持目前国内外广泛采用的EtherCAT高实时性工业以太网协议费振东和余国民还同时特别谈到了下一代实时网络,这些实时网络能够满足像是视频这类数据的大吞吐量要求,也能满足关节控制信号的实时性要求。先楫已经在产品中对下一代实时网络做出了率先的支持,并且和合作伙伴一起为客户的研发提供更多的方案支持。
而在高集成度/小型化的问题上,实际上前文例举的关高算力、高性能运动控制等命题往往与高级程度相互关联。即高集成度在一定程度上是实现高算力、高性能运动控制的基础;比如将ESC集成在芯片内,就有利于高实时性的达成。
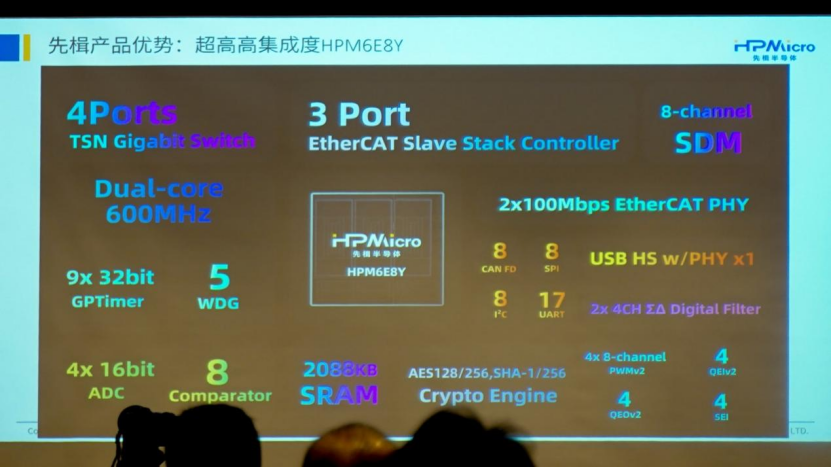
不过还有个更为具体的例子。先楫在今年CES展会上展示的HPM6E8Y就在原来HPM6E00系列基础上进一步提高了集成度。下面这张图展示了这款产品集成的各种资源,费振东特别强调了“HPM6E8Y集成两个百兆以太网PHY在业界引起了热烈反响,不少客户已着手相关产品开发”。这“为关节伺服设计进一步减少板级尺寸、BOM数量,提高系统级集成度打下了坚实基础”。
最后是高安全与高可靠性需求。费振东说信息安全系统也是先楫MCU产品的优势之一。他举例HPM6E00系列产品的信息安全考量:包括硬件加解密引擎、完整信任链、密钥管理、基于生命周期的安全管理,以及一定程度的攻击检测和防护。“在未来相当长的时间里,能够满足各类信息安全规范和要求。”
03
是整个产业链的进步
基于以上布局,下面这张图给出了在一个人形机器人之上,先楫可提供对于其不同位置的产品支持。虽然这只是一类应用的示例,但我们认为在总结机器人运动控制能力的问题上是颇具代表性的。

如文首提到的,先楫目前在机器人领域已经积累了超过百家客户,涵盖了各种不同类型的机器人——甚至包括一些特殊用途的机器人,比如进行海底泥土采集的、在太空中做物体抓取的,称得上是上天下海了。余国民形容先楫涉足“机器人全产业链布局”,“微型伺服、绝对值编码器、电动夹爪、ARM移动机器人、AGV小车、各类机械臂、人形机器人等等。”“机器人还没像现在这么火的时候,先楫其实就已经开始做机器人芯片了。”
现如今的机器人技术发展“不是以月为单位了,每天都能看到新东西”,从当年“大家看到波士顿动力的机器狗为之震撼”,到现在“会扭秧歌的宇树机器人”。

“以前的机器狗和机器人需要人去编程,轴向也少,很容易出问题。”而现在能站在舞台上跳舞的机器人,“大脑用上了AI大模型、VLM,外加高算力GPU;一个人形机器人几十上百个关节;关节点驱动取代传统液压驱动,关节功率密度也更大,通讯标准和方式变得更优秀,响应特性更好;机器人身上也集成了很多传感器...”余国民在谈推动机器人发展的技术时说。
虽然现阶段机器人相关最热的话题在于其大脑和AI,但在先楫看来机器人技术现如今是一天一进步,“是整个产业链的共同进步”,“进步的是我们,也包括做集成解决方案的、做供应链的合作伙伴,还有我们的客户”。
“几年前我们去拜访杭州某家头部机器人客户的时候,他们公司门口有片公园。当时的机器狗在公园里走,踩到石子就会摔倒。但再看现在他们的新产品,走路丝滑流畅。”这是包含先楫半导体在内,机器人全产业链共同努力的结果。
本文转自EETC
-
机器人
+关注
关注
213文章
29779浏览量
213196 -
控制芯片
+关注
关注
2文章
554浏览量
40318
发布评论请先 登录
MT6701磁编芯片:引领机器人关节控制智能化新潮流
盘点#机器人开发平台
人形机器人火爆背后,先楫半导体解构运动控制芯片进化密码

【「# ROS 2智能机器人开发实践」阅读体验】机器人入门的引路书
【「# ROS 2智能机器人开发实践」阅读体验】+内容初识
什么是机器人?追踪机器人技术的发展和未来
安森美在自主移动机器人领域的发展成果
从单芯片方案到多类型传感,ADI赋能人形机器人创新







 工商网监
工商网监
评论