 基于泰克示波器的三相电机驱动器测量方案
基于泰克示波器的三相电机驱动器测量方案

概述
本指南将介绍如何使用泰克8通道5系列B MSO示波器的逆变器、电机和驱动器分析软件对变频驱动器的输入、直流母线和输出进行稳定、准确的电气测量,以及对电机进行机械测量。
输入(线路)测量
大多数工业和重型商用变频驱动器都采用三相输入。较小的驱动器可能使用单相线电压。特别是在电动汽车和其他电池供电的应用中,驱动器通常采用直流供电。IMDA电源分析软件支持所有这些配置(参见上集的“接线配置”)。在IMDA测量包中,电能质量测量组和谐波测量组用于计算驱动器的功耗以及驱动器对配电系统的预期影响。
电能质量
电能质量测量组包括表征驱动器功耗的测量。这些测量也可以用于驱动器的输出(请参阅下面的“输出测量”)。图21显示了电气分析部分中的电能质量测量。选择电能质量测量会生成相量图、波形和测量标识。图中显示了已配置绕组的电能质量能量和功率数学波形。功率波形是使用数学算法将各相的电压和电流波形相乘得出的。
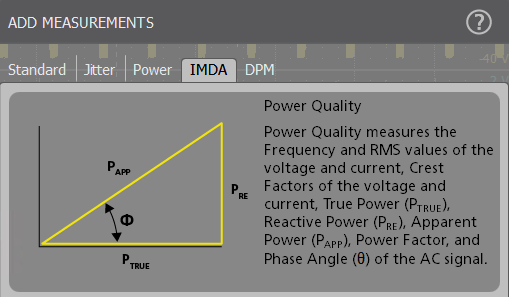
图21. 在泰克IMDA软件中,测量分为电能质量、谐波、纹波和效率。还提供DQ0和机械测量的选择。
电能质量测量可用于确认探头和接线配置是否正确。如果一个或多个功率测量显示负读数,请检查您的电流探头,确认与负功率读数相关的通道上的探头是否连接错误。对于三相系统,请检查相量图。正常情况下,各相电压应基本相同,相位差为120°。
用户可以选择只测量基频的电能质量,也可选择测量所有频率的电能质量。当选择“基频”选项时,将仅测量基频分量。当选择“所有频率”选项时,将计算所有谐波(包括基频)的电能质量测量值。
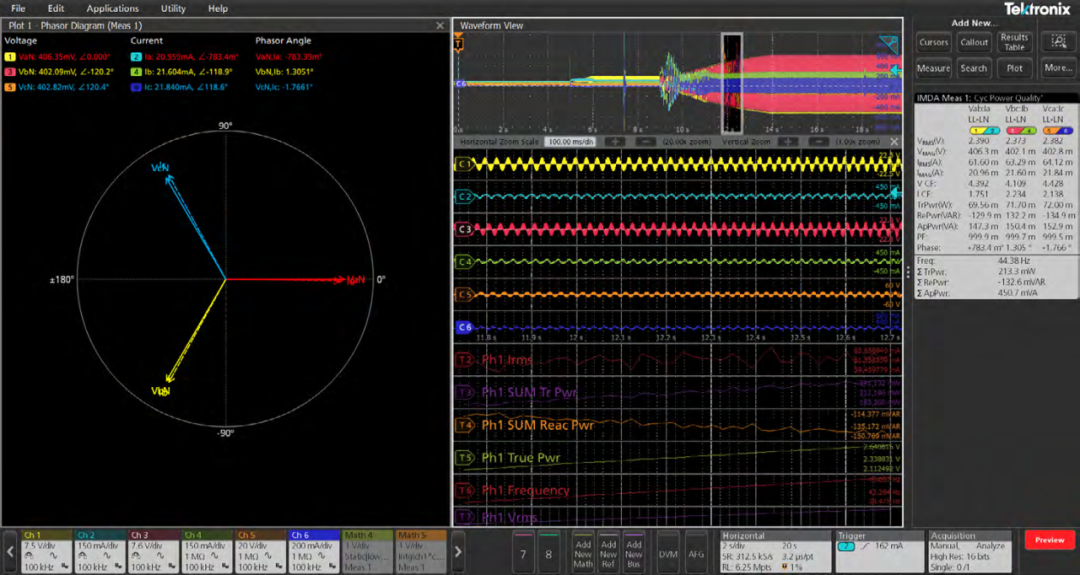
相量图:图22所示的相量图是一个圆形图,表示相电压和相电流之间以及各相电压和电流之间的幅度和相位角。理想情况下,一个平衡的三相系统具有幅度相等的矢量,且相邻矢量的相位差正好是120°。
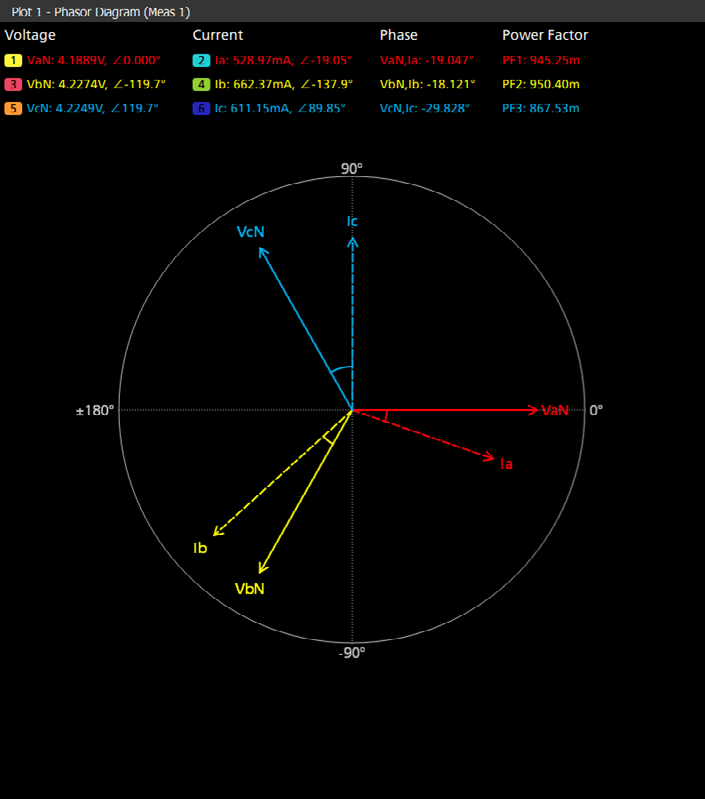
图22. 相量图显示各相电压和电流之间的关系。一眼可以看出该图显示了系统的平衡以及电压和电流(电容或电感)之间的相移。
相量图(图22)给出了各相的以下测量值:
?相对于参考相电压(图22中的VaN)的RMS电压和相位角
?相对于参考相电压的RMS电流和相位角
?电压和电流之间的相位
?功率因数
电能质量测量标识(示例见图23)显示了许多测量值。在此示例中,3V3I配置中提供各相的以下测量值:
VRMS
在整数个周期内测得的相电压的RMS值。相电压的数量因接线配置而异。
VMAG
在电机工作频率下测得的相电压幅值。工作频率是电压信号的基频,通过应用快速傅里叶变换 (FFT)确定。
IRMS
在整数个周期内测得的相电流的RMS值。电流数量可能因接线配置而异。
IMAG
在电机工作频率下测得的相电流信号的幅值。工作频率是电流信号的基频,通过应用FFT确定。
波峰因数(电压波峰因素VCF和电流波峰因素ICF)
波峰电压或电流与RMS电压或电流的比值。( 正弦波的波峰因数为1.414。)
有功功率 (TrPwr)
有功功率通过以下公式确定:
在离散域中,公式为:
其中n = 1,2…N,N表示样本数。

有功功率 (P) 是传输到负载电阻部分的实际功率,以瓦特为单位。请注意,只有纯正弦波的有功功率才等于VRMS × IRMS × cos(φ),此时,φ表示电压和电流波形之间的角度。
视在功率 (ApPwr)的计算公式为:
ApPwr = VRMS× IRMS
其中VRMS和IRMS根据电压和电流波形计算得出。
单位为VA。
请注意,此处不能对MATH1功率波形执行RMS计算,否则将得出错误的结果。
无功功率 (RePwr)的计算公式为:

单位是VAR,即无功伏安。
功率因数 (PF)的计算公式为:
作为两个功率的比值,功率因数被认为是无量纲数。这种计算比使用相位余弦更可取,因为不仅考虑了基频,还考虑了所有测得的频率分量。
相位角 (Phase)的计算公式为:

单位是度。与功率因数计算一样,该计算方法考虑了整个测量频谱。
对于任何多相系统,电能质量测量结果给出以下总计数量:
? 频率 (Freq) 根据低通滤波边沿信号的周期计算得出。
?总有效功率 (STrPwr) 是所有相的有效功率之和。
?总无功功率 (SRePwr) 是所有相的无功功率之和。
?总视在功率 (SApPwr) 是所有相的视在功率之和。
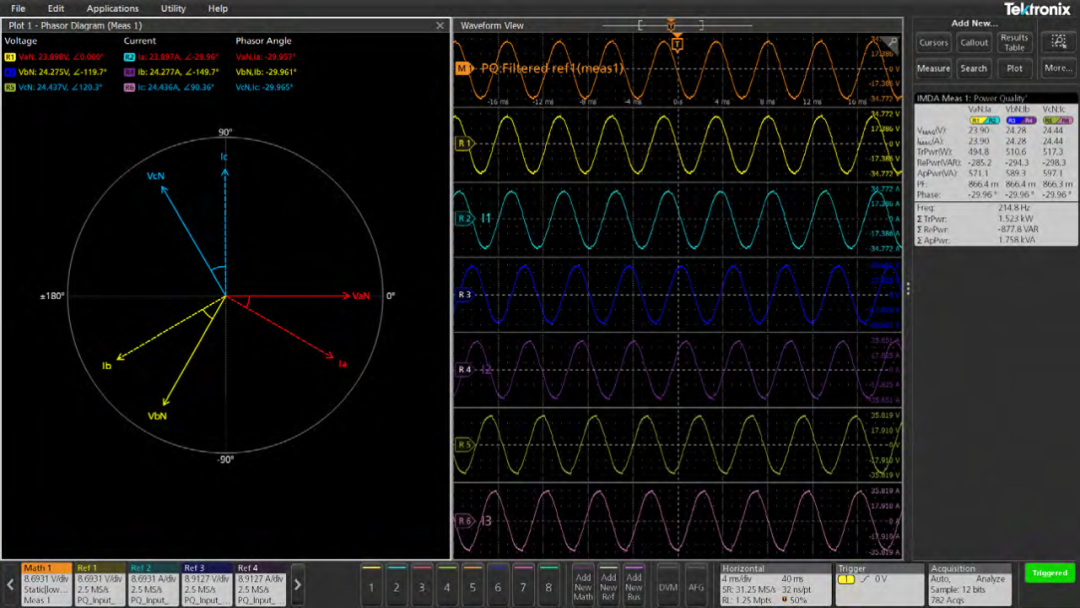
图23. 电机驱动器输入(线路)侧的电能质量测量。
谐波
谐波测量呈现基频及其谐波处的信号幅度,并测量信号的RMS幅度和总谐波失真。可以根据IEEE-519或IEC 61000-3-2标准或自定义限制来评估测量结果。例如,可以将IEC61000-3-12标准的限制以csv文件的形式加载,并根据这些限制进行测试。测试结果可以记录在详细报告中,注明是否合格。
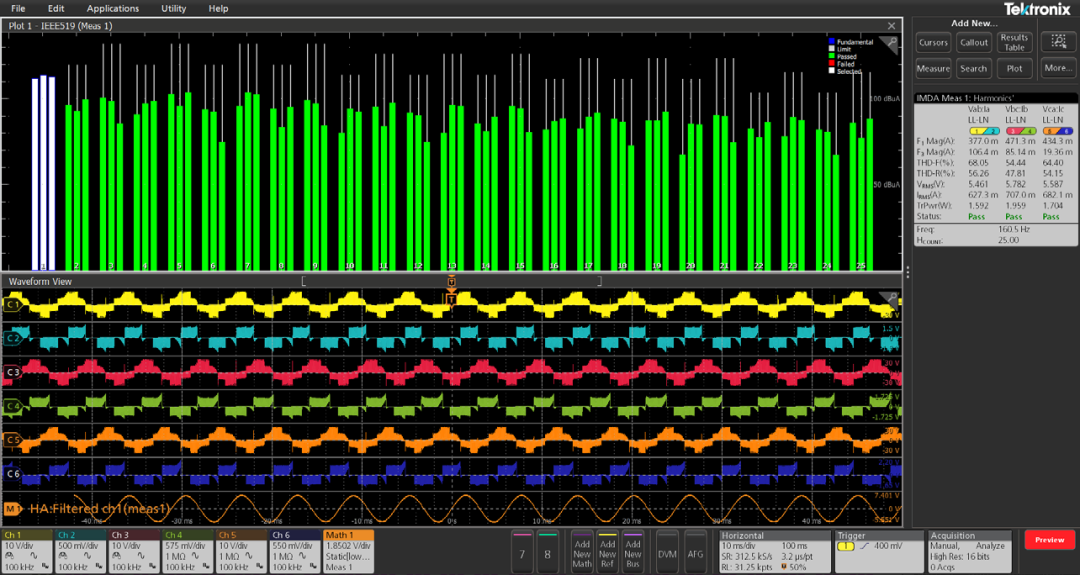
图24. 谐波可以在电机驱动器的输入和输出上测量。此例显示了驱动器三相输出上的谐波。
直流母线测量
纹波可以在两个不同的测试点测量,即在直流母线和开关半导体上测量。
线路纹波:该测量提供相应交流电压信号的线路频率部分的RMS和峰 - 峰值测量值。
开关纹波:该测量提供相应电压信号的RMS和峰峰值测量值。
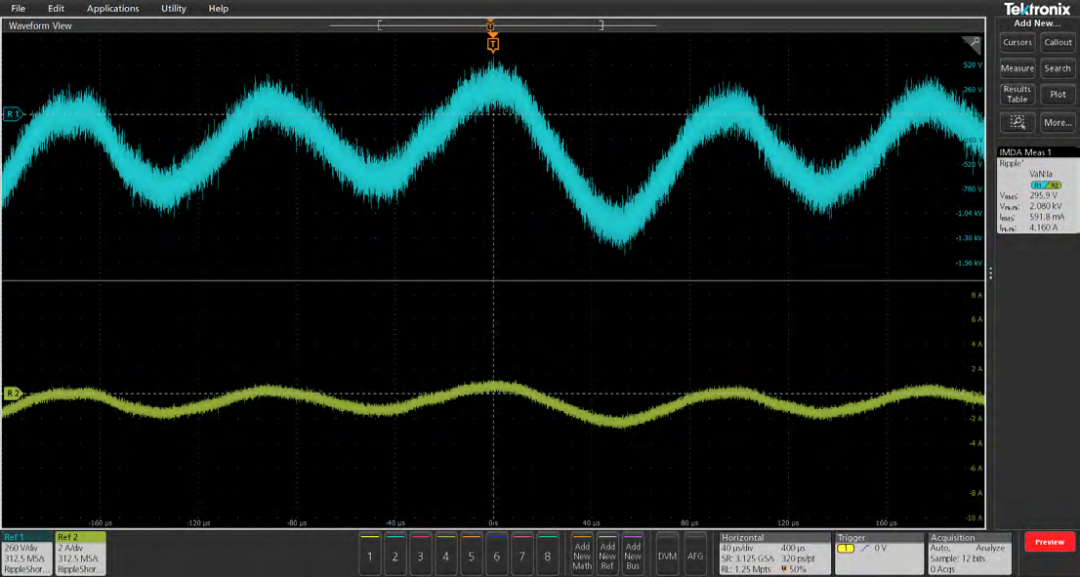
图25. 直流母线上的纹波。
开关分析
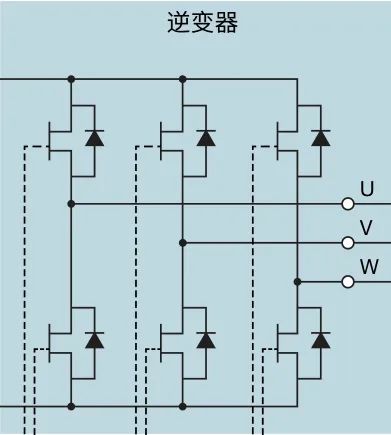
图26. 开关损耗测量有助于优化逆变器设计。
在设计或验证变频驱动器内的开关电路时,了解与驱动器开关阶段相关的损耗非常重要。选项5-PWR和6-PWR提供开关损耗测量和斜率。电压探头连接到开关的两端,而电流探头连接用于测量流经开关的电流。
可以添加多个测量来获取各开关的测量值。
5/6-PWR分析包包括以下测量:
开关损耗:测量开关器件开启、关闭和传导区域中的平均瞬时功率或能量。该测量将创建一个功率波形,而功率波形是根据每对V和I波形计算得出的。
dv/dt:测量电压从基准参考水平(RB)上升到最高参考水平(RT)或从最高参考水平(RT)下降到基准参考水平(RB)过程中的变化率(斜率)。该测量将创建一个功率波形,而功率波形是根据每对电压和电流波形计算得出的。
di/dt:测量电流从基准参考水平(RB)上升到最高参考水平(RT)或从最高参考水平(RT)下降到基准参考水平(RB)过程中的变化率(斜率)。该测量将创建一个功率波形,而功率波形是根据每对电压和电流波形计算得出的。
直接正交零点 (DQ0) 的变换和测量
Clarke和Park变换通常用于简化磁场定向控制系统的实施。显示了一个磁场定向控制系统的示例。在该控制系统中,这些变换用于将施加到电机的三相电压转换为正交D矢量和Q矢量。这些简化的矢量可以轻松转换和集成,以保持所需的速度。然后可以使用逆变换来创建逆变器中脉冲宽度调制的驱动信号。
这些D矢量和Q矢量可能位于数字信号处理模块(例如 FPGA)的深处,并且可能无法直接测量。IMDA软件提供DQ0分析选项,可以通过简单的设置根据三相输出电压或电流得出D和Q的测量值,从而可以快速轻松地查看控制系统的调整效果。
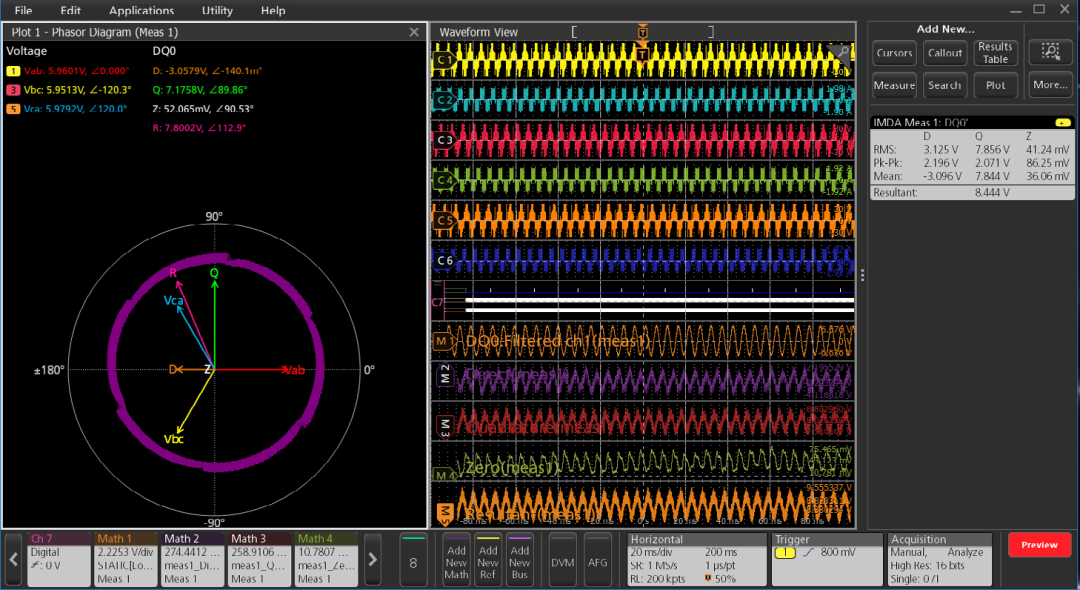
图27. DQ0相量图显示D矢量、Q矢量和合成矢量(R),其中电机速度和方向反馈由正交编码器传感器提供。
除了D矢量和Q矢量,分析软件还显示合成矢量 (R)。R矢量是通过计算D矢量和Q矢量上各采样点的D和Q斜边矢量得出的。R矢量的起始角度是为0度,根据正交编码器接口(QEI)的索引脉冲(Z)确定。增量角度由QEI根据编码器每转脉冲数(PPR)和电机的极对数计算得出。通过观察R矢量旋转,可以确认控制系统是否正在平稳地驱动电机。还可以查看换向次数。请注意,上方图27中R矢量图中的六个失真点对应于六个换向步骤。图28显示了DQ0测量的源设置示例。除了选择源和接线方式之外,还可以指定可应用于所有源或仅用于边沿限定器的低通滤波器。这有利于减少由于电磁干扰(EMI)拾取和开关噪声引起的噪声。
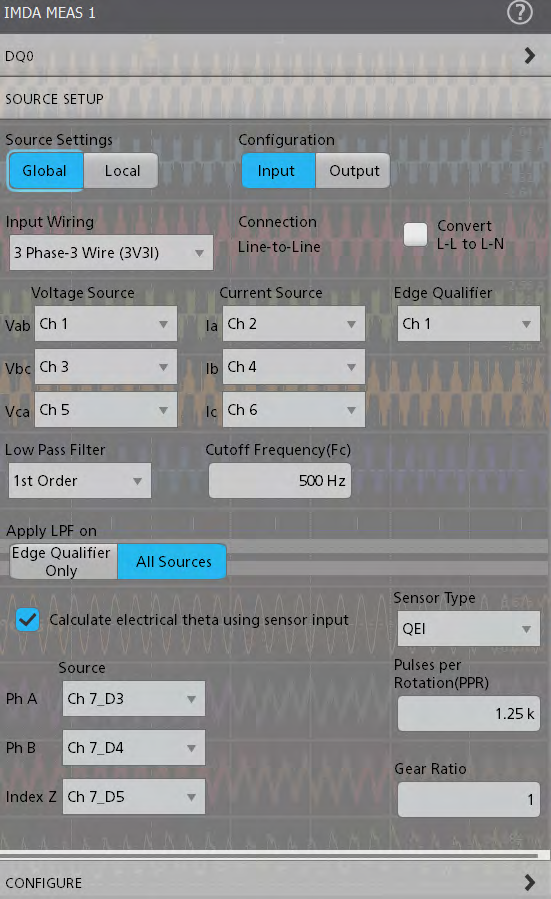
图28. 配置示波器以在使用正交编码器接口 (QEI) 的系统上进行DQ0测量。
输出测量
PWM驱动器的输出波形很复杂,由与载波相关的高频分量和与驱动电机的基频相关的低频分量构成。使用示波器对PWM波形进行测量可能颇具挑战,因为很难实现稳定的触发。
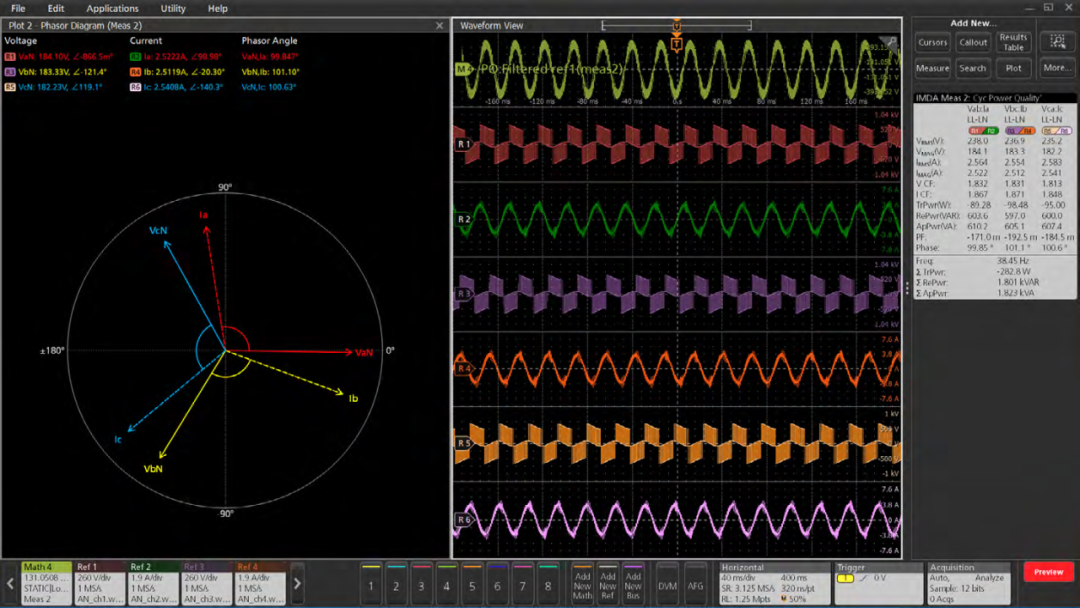
图29. 此处显示的PWM波形包括一个频率可达数百千赫兹的载波和电机对其做出响应的较低频率平均电压。
棘手的是,波形是在低频下进行调制的。因此,高频测量(例如总rms电压、总功率等)必须在高频下进行,但要覆盖输出波形中低频分量的整数个周期。
IMDA软件的主要优势之一是能够对PWM波形进行稳定的测量。该软件能够解调用户指定为“边沿限定器”的通道上的PWM波形,并将包络提取为“数学通道”。这使测量能够实现精确的同步。
在变频驱动器输入上使用的相同电能质量和谐波测量也可用于驱动器的输出,用于测量电压、电流、相位和功率。详细介绍见本指南的“输入测量”部分。除单相三线配置仅可用作输入测量外,相同的接线配置可同时用于输入和输出测量。
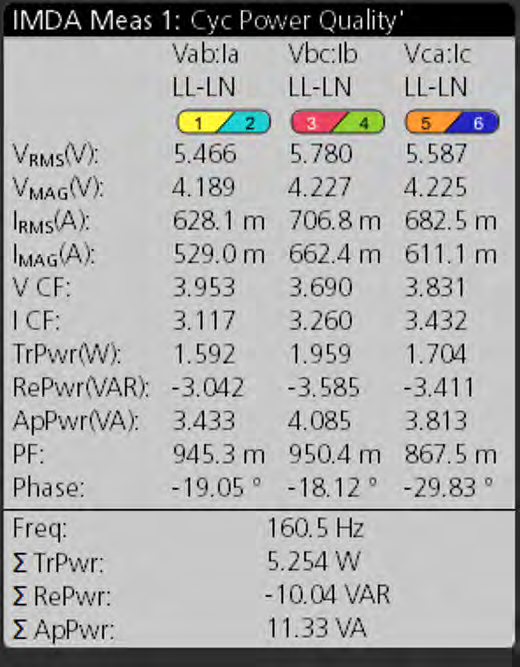
图30. 电能质量测量组提供了一组快速稳定的PWM输出测量的概览,包括电压、电流、相位角、有功功率、视在功率、无功功率和功率因数。
效率测量
效率测量是指相应输入和输出电压和电流对的输出功率与输入功率的比值。在5系列和6系列MSO上,输入和输出均采用双功率表法(V1*I1和V2*I2)。如此可以使用八个输入通道完成三相输入和输出功率的完整测量,如图31所示。
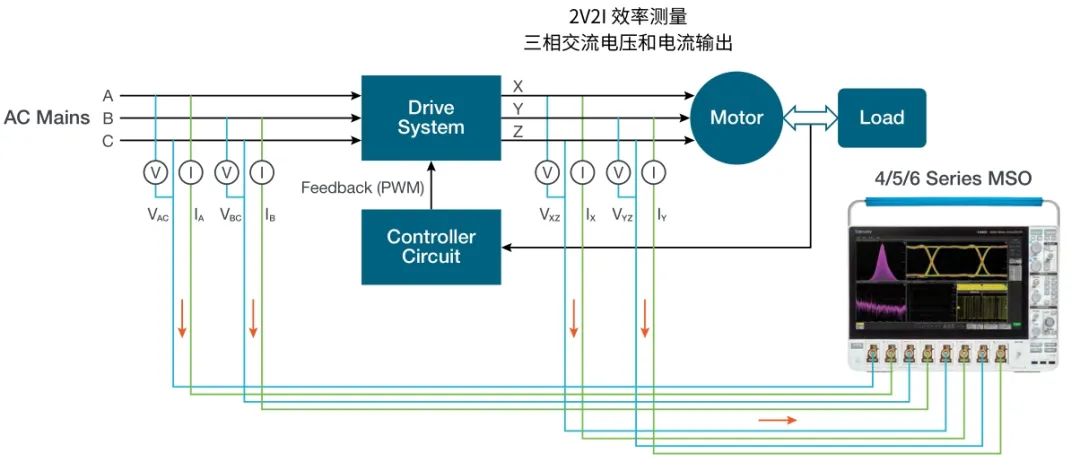
图31. 使用8个示波器输入通道测量三线输入三线输出系统的驱动效率。
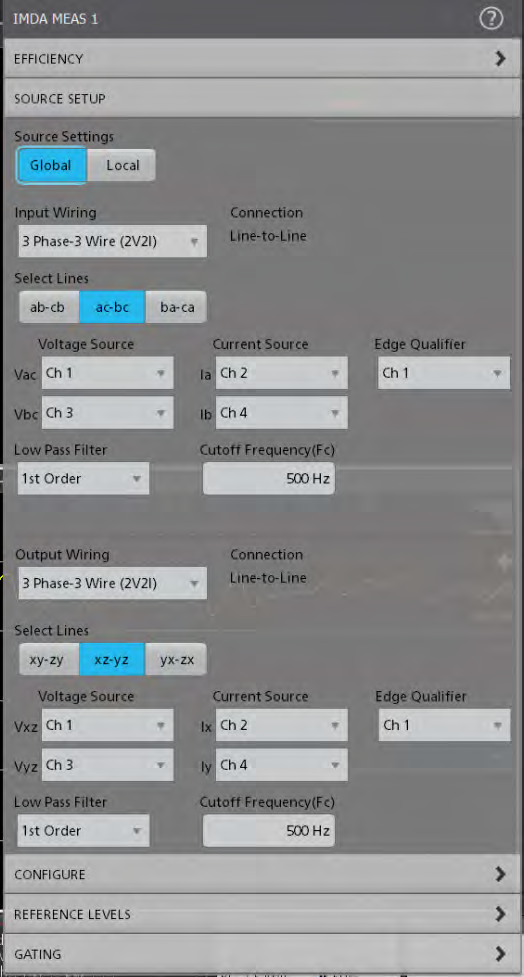
图32. 使用5/6系列MSO示波器进行效率测量的三线输入三线输出配置设置。
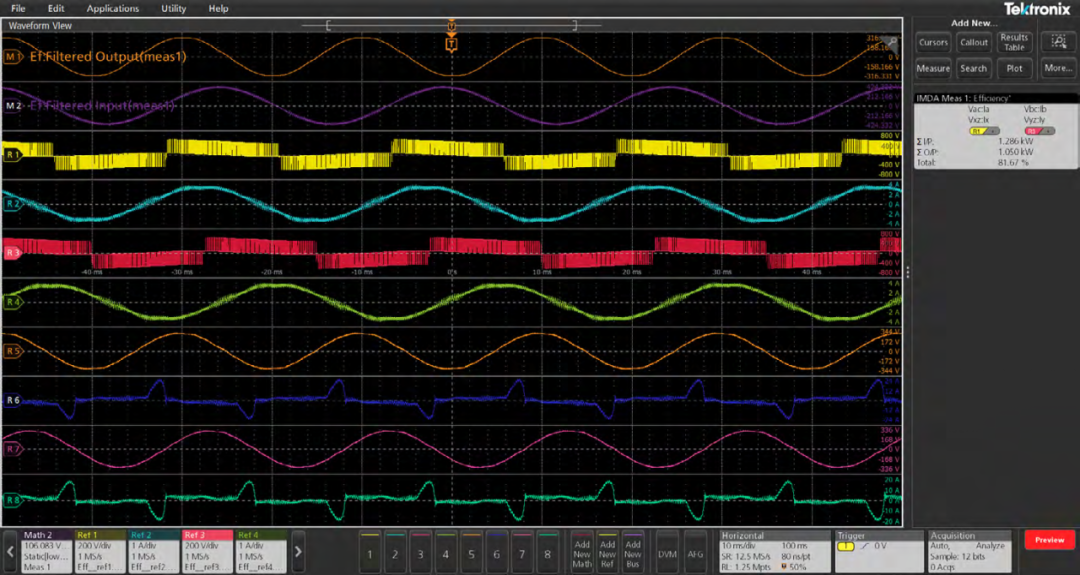
图33. 使用双功率表法对变频驱动器的输入和输出进行效率测量。
机械测量
机械电机测量,例如角位置、旋转方向、速度、加速度和扭矩的测量,为控制系统提供了重要的反馈。根据电机和控制系统的类型,使用不同类型的传感器来测量机械参数。电机速度通常用每分钟转数(RPM)或绕固定轴的每分钟完整转数来表示。加速度指速度变化率。扭矩是电机在其输出轴上产生的旋转力,通常以牛顿米(Nm)和英尺磅(ft-lbs)为单位。扭矩可用于确定电机的机械功率输出。而机械功率可以与电功率一起用来计算总系统效率。
泰克开发的带5/6-IMDAMECH选项的电机驱动分析软件支持以下换能器:
?霍尔效应传感器
?正交编码器
?旋转变压器
?扭矩传感器
对于具有固定扭矩常数的电机,该软件还支持基于电机电流的扭矩测量。
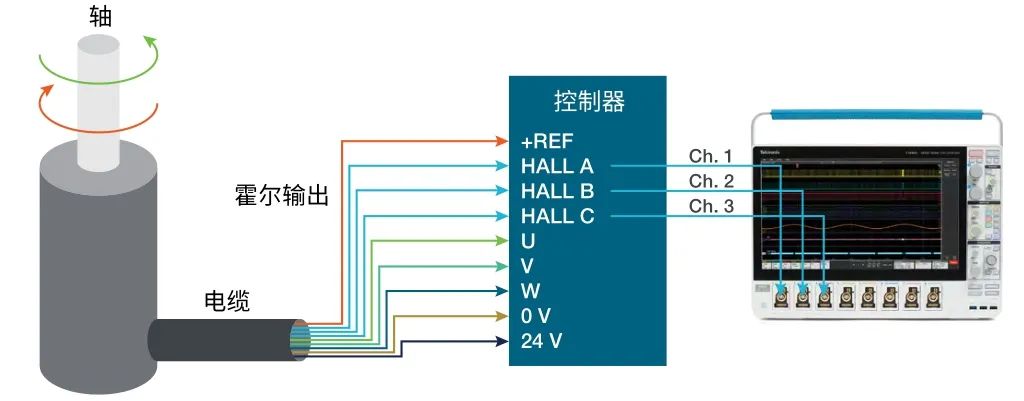
图34. 5/6系列MSO示波器可以连接到霍尔效应传感器的输出端,以测量速度加速度和方向。
霍尔效应传感器用于为控制系统提供位置反馈。例如,霍尔效应传感器在无刷直流电机中用于监控转子位置以实现同步换向。传感器输出可用于计算速度、加速度和方向。此外,霍尔传感器输出与速度成正比的脉冲,通常三个一组使用。
IMDA软件可以使用霍尔传感器输出来测量电机速度和加速度,如图36所示。在设置测量参数时,需要指定极对数和齿轮比,以便软件可以正确测量速度。可以使用TPP1000无源探头或高压差分探头,例如THDP0200或THDP0100,具体取决于电机输出功率和噪音水平。在5系列或6系列MSO上,还可以在任意示波器通道上使用TLP58逻辑探头来测量传感器输出脉冲。在其中一个FlexChannel输入上使用逻辑探头,即可将输入转换为八个逻辑通道,从而使单个通道能够支持多个霍尔传感器。将电机转速与速度测量值进行比较即可验证连接是否正确。
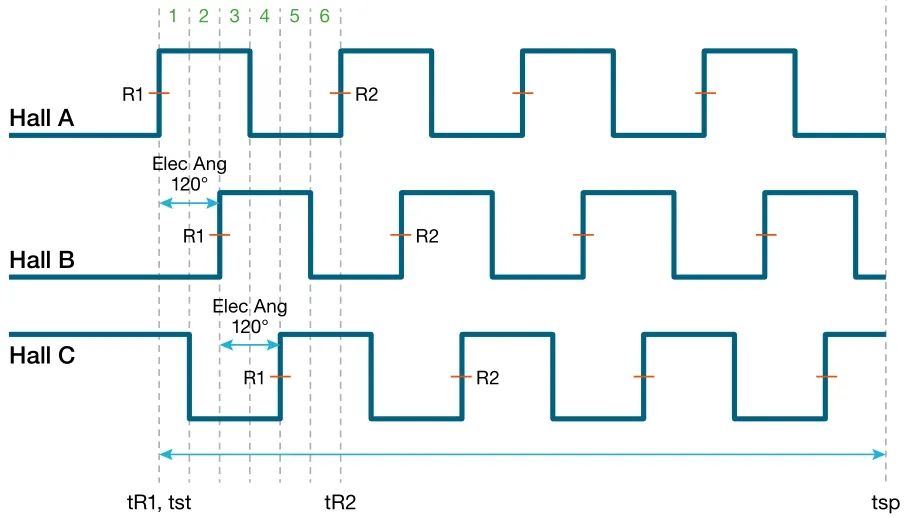
图35. 三个霍尔传感器提供反馈,控制系统根据反馈确定转子位置。此例显示了四极对电机的六步换向。机械旋转的开始时间为 tst。旋转结束时间为tsp。一次机械旋转包含四个电循环。IMDA软件可以利用这些信息来测量速度、方向和加速度。
机械转速是指转子旋转一圈所需的时间(以秒为单位)。速度以每分钟转数(RPM)表示。

其中停止时间 (tsp) 和开始时间 (tst) 之差表示转子的一次机械旋转。极对数(如图36所示)决定了每次机械旋转由多少个电周期组成。齿轮比G可用来表示电机转子和输出轴之间的任何齿轮传动。
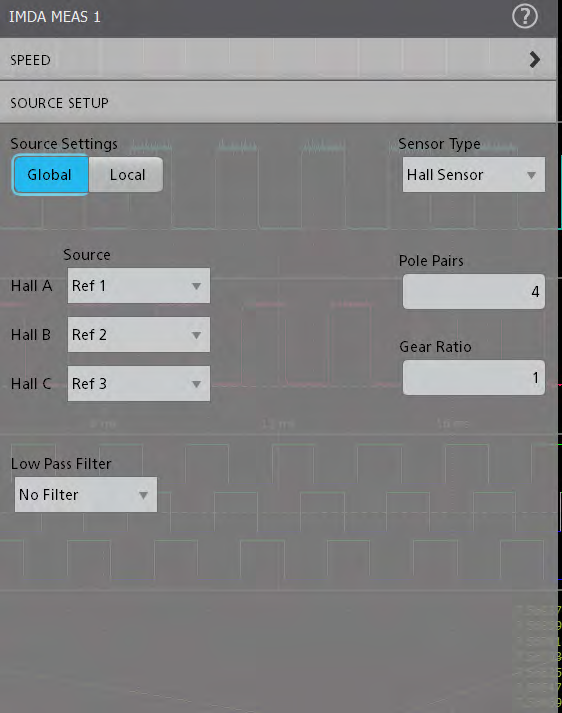
图36. 为使用霍尔传感器的系统配置示波器速度测量。
加速度指单位时间内速度的变化率。

IMDA软件根据霍尔传感器输出的上升沿顺序或下降沿顺序来确定电机的旋转方向。要测量方向,必须指定极对数。请看图37所示的两极对电机,其中A、B和C代表相距120°的三个霍尔传感器位置。第一个转子磁铁的北极(N1)在0度处与霍尔传感器A相交并输出一个上升沿。如果配置的旋转方向是顺时针(A-B-C),N1接下来将与霍尔传感器B相交,与霍尔传感器A成120度角。但N2与霍尔传感器C仅成60度,并将首先与霍尔传感器C相交。因此,对于两极对电机,脉冲边沿顺序将为A-C-B。
IMDA软件还将霍尔传感器A上的第一个上升沿与120度后的下一个上升沿进行比较,以验证方向。例如,如果第一个上升沿来自霍尔传感器A,并且在120度处测量到霍尔传感器B的上升沿,则可以确定转子旋转顺序为A-B-C,在此示例中为顺时针。如果在120度之后在霍尔传感器C上测量到上升沿,则旋转顺序为A-C-B或逆时针。
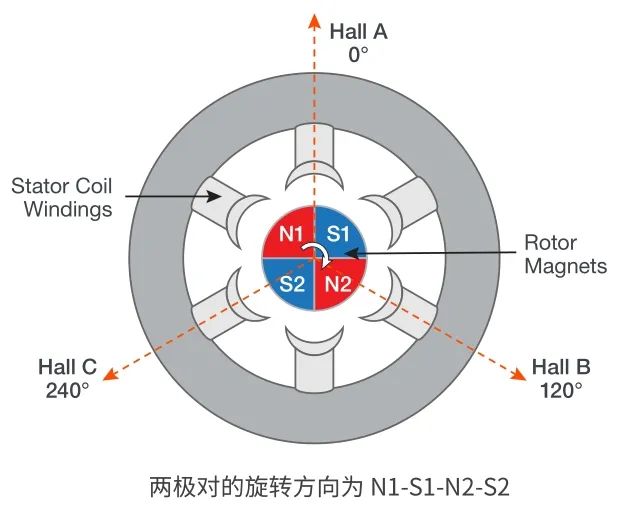
图37. 要确定旋转方向,必须知道转子上的极对数。
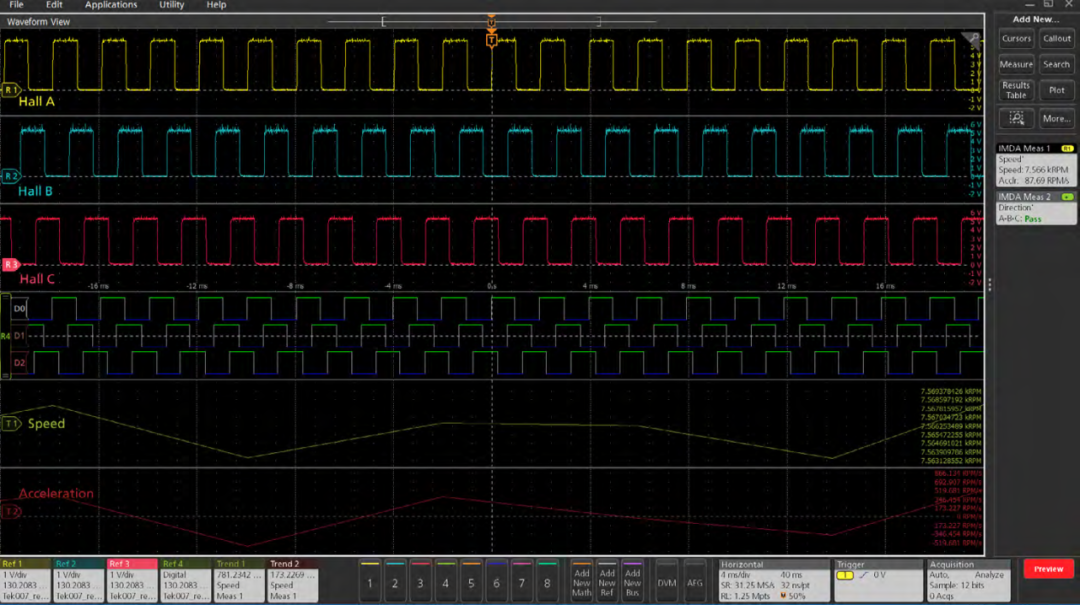
图38. 霍尔传感器波形和测量。显示屏底部的两条线分别为速度和加速度的趋势图。
正交编码器接口 (QEI)
正交编码器接口(QEI)由安装在旋转轴上的开槽盘、光源(LED)和光接收器(光电晶体管)组成。
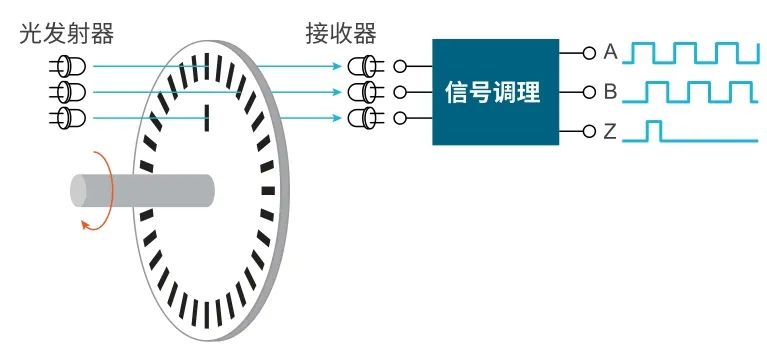
图39. 正交编码器的基本工作原理。
圆盘上的槽孔数量决定了PPR(每转脉冲数)。LED发出的光线穿过圆盘上的槽孔,传输到光电晶体管并转换为相位差为90°的脉冲信号。
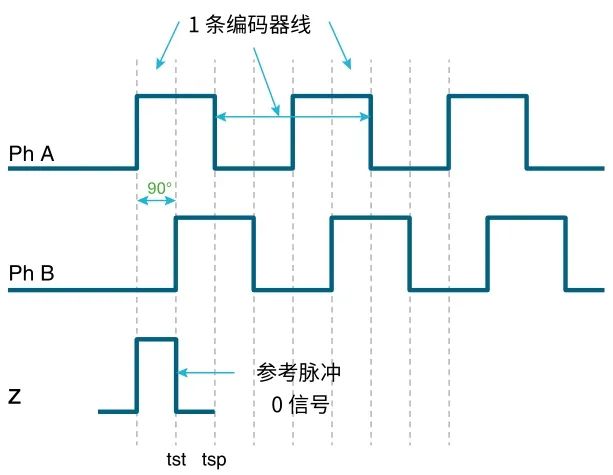
图40. 正交编码器接口的脉冲模式。脉冲信号的相位差为90°,因此A相的每个周期包含四个状态:10、11、01和00。
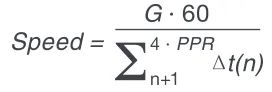
其中速度以RPM为单位,PPR是每机械转动的脉冲数。Δtn是状态转换之间的差值,即在A相上出现一个边沿,然后在B相上也出现一个边沿。A相的每个脉冲周期有4次状态转换,因此每转有4* PPR次状态转换。齿轮比(G)可用于调整速度,以适应加速(G>1)或减速(0
编码器的增量角(或分辨率)为:
IMDA软件计算出转数,然后乘以增量角度,从而计算出旋转角度。
旋转变压器
旋转变压器是一种安装在电机上的传感器,用于确定转子的角度。由于其结构简单可靠,因此广泛应用于高温、振动等恶劣条件。旋转变压器由以下部分构成:
?由高频正弦输入驱动的励磁绕组
?两个固定正交输出绕组
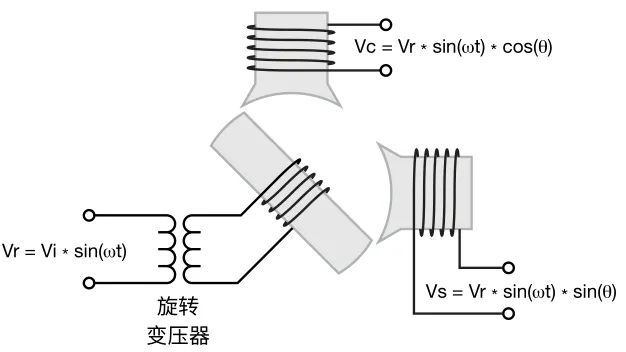
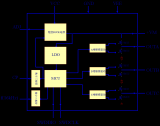
图41:旋转变压器系统框图,其中转子中有一个励磁绕组,并且两个固定输出绕组呈正交。
图41为旋转变压器及其输出信号的框图。旋转变压器由一个称为定子的固定部分和一个称为转子的旋转部分组成,转子安装在电机轴上。
定子的初级绕组连接到高频正弦信号。该励磁信号通过变压器作用耦合至转子上的绕组。该转子信号是图 42所示的参考信号。
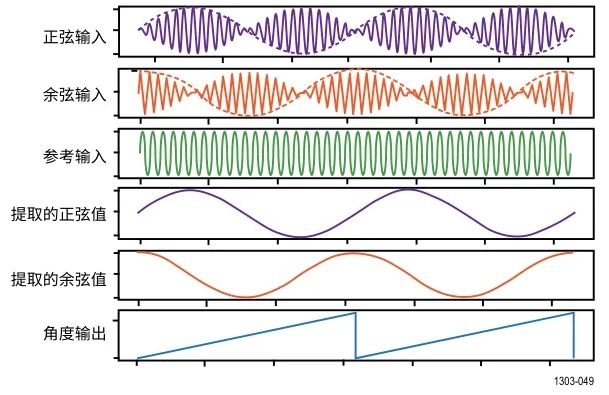
两个次级定子绕组提供输出信号。正弦绕组和余弦绕组呈90度角安装。当电机旋转时,转子绕组的交变磁场会在正弦和余弦绕组中感应出调幅电压。任何给定时间的信号幅度取决于转子的角度。因此,正弦和余弦电压的相对幅度可用于确定转子的瞬时角度。
图42. 旋转变压器的正弦、余弦和参考信号用于实时确定电机的转子角度。
使用旋转变压器进行机械测量需要三种模拟输入波形:正弦波、余弦波和参考波。参考信号是励磁信号,而正弦和余弦信号是输出绕组信号。正弦信号和余弦信号由参考信号调制。正弦和余弦包络必须提取才能用于测量。正如预期的那样,这两个包络之间的相位差为90度。
在任何给定时间点,电机旋转角度的确定公式为:
电机角度 = Arctan(ASIN/ACOS)
其中ASIN和ACOS分别是正弦和余弦包络的瞬时电压。
电机速度通过测量正弦包络信号的频率来确定。例如,如果有两个极对,则包络的两个周期代表一次旋转。
速度 = 频率(包络信号)/ 极对数
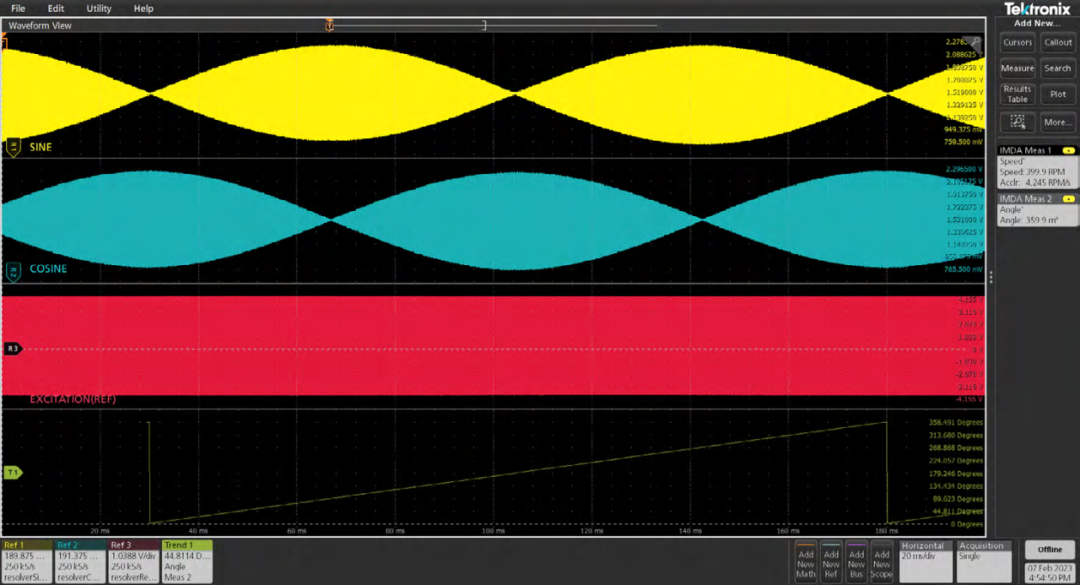
图43. 使用旋转变压器传感器信号进行机械测量。
扭矩测量
电机扭矩是电机在其输出轴上产生的旋转力,以牛顿米(Nm)、英尺磅(ft-lbs)、盎司力英寸(ozf)、英寸磅力(inch-lb)等为单位进行测量。5/6系列MSO上的IMDA软件支持两种扭矩测量方法。
传感器法
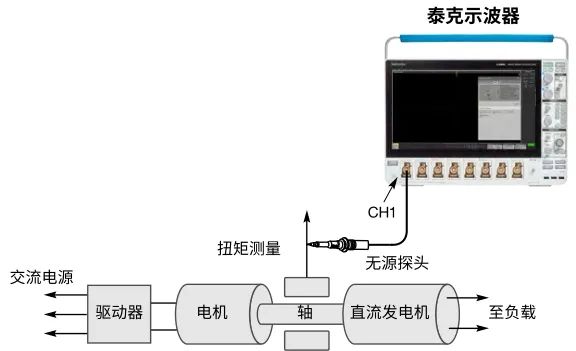
这是最常见的扭矩测量方法,使用扭矩传感器或测力传感器输出,如图44所示。通过将旋转扭矩传感器与电机轴耦合,可以测量电机产生的扭矩。可以使用无源电压探头捕获扭矩波形,电压波形将与测得的扭矩值成正比。
图44. 用于使用IMDA软件测量扭矩传感器输出的示波器连接
必须配置扭矩传感器的高值和低值以及探头输出电压的相应高值和低值。测量将把采集的电压波形转换为扭矩值。
测力传感器将测量力。在这种情况下,扭矩的计算方法是将力与力臂长度(距离)相乘,从而将测得的力转换为扭矩。
电流法
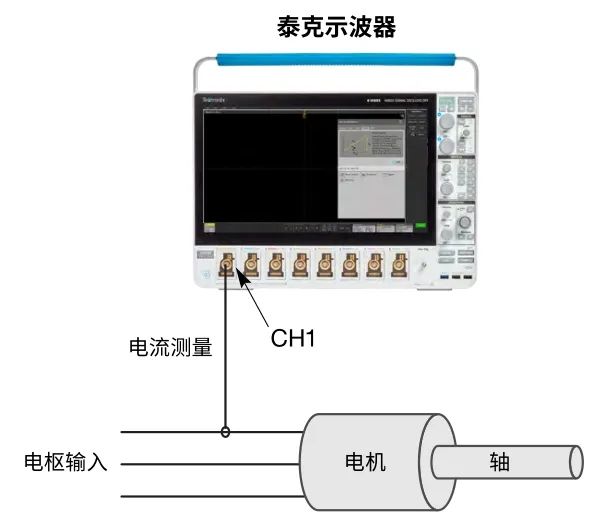
对于具有指定扭矩常数的电机,可以根据RMS电流推算出扭矩。这种方法提供的是扭矩估值。图45显示了使用“电流法”进行扭矩测量的连接设置。
图45. 对于具有指定扭矩常数的电机,可以使用电流来估算扭矩。
在这种情况下,电机产生的扭矩与单相或三相RMS电流成正比。比例因数用电机扭矩常数表示。
扭矩 = 扭矩常数 * IRMS
机械功率
电机输出产生的机械功率是用测得的速度乘以扭矩值计算得出的。乘数是一个用于计算机械功率(单位为瓦特)的常数。速度单位为RPM。常数值取决于扭矩测量所使用的单位:如果是牛顿米,常数值则为 104.7252;如果是盎司英寸,则为0.739522;如果是英尺磅,则为141.9883;如果单位是英寸磅,则为11.83235897。
机械功率 = (扭矩 * 乘数) * 速度
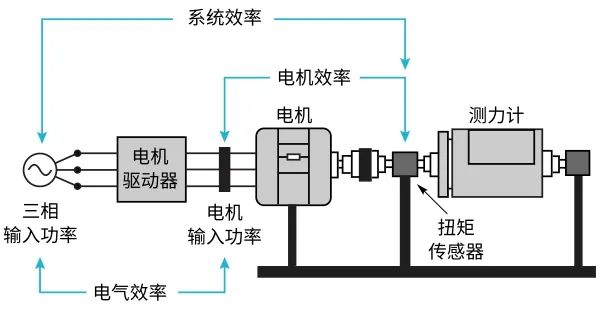
系统效率
系统效率是电机驱动系统的总效率,也被称为机电效率。系统效率表示有多少电能转化为机械能。系统效率是电机的机械功率与用于为驱动器供电的三相电功率的比值。
系统效率 = 机械功率 / 电功率
图46. 可以对逆变器(电气效率)、电机效率以及整个系统进行效率测量。
动态测量
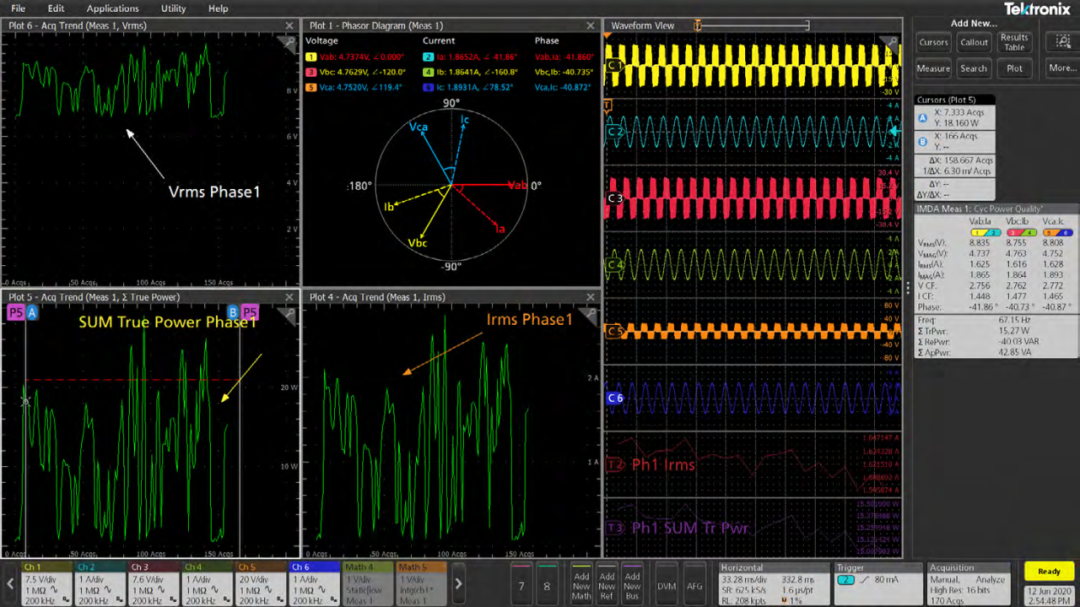
电机驱动分析的一个常见要求是,能够对电机随时间而变的响应进行测量,以监控被测设备在加速和不同负载条件下的行为。这些动态测量将帮助您了解不同条件下电压、电流、功率和频率等参数之间的相互影响。IMDA软件的电能质量测量组提供了两种类型的趋势图用于此分析:
?时间趋势图
?采集趋势图
两种趋势图各有其优点,可用于呈现电能质量测量组内支持的子测量。这些趋势图可以保存为CSV文件以供后期处理。
时间趋势图
时间趋势图显示单次采集中每个波形周期的测量值。这种趋势图适用于观察测量值在短时间内的具体变化,以及将这些变化与其他相关数据进行关联分析。
图47. IMDA软件中的时间趋势图用于记录单次采集过程中测量值的变化。
采集趋势图
采集趋势图记录每次采集的单次平均测量值,因此适用于长期分析。在测试配置期间,可以通过设置采集参数来指定测试持续时间。这些趋势图可以保存为CSV文件以供后期处理。如果将绘图数据保存为CSV文件,时间值即可用。
动态负载控制对于三相感应电机和其他电机也很重要。通过采集趋势图可以查看加速、恒速和减速过程中的测量值。
图48. 采集趋势图记录多次采集过程中测量值的变化。在上图中以绿色线条表示。请注意,该图还会显示最近一次采集的波形和测量值。
总结
对三相电机驱动器进行测量面临着诸多挑战,因为必须进行连接,波形非常复杂且数学运算量巨大。泰克5/6系列MSO示波器的IMDA软件大幅简化了这些测量,为功率分析仪测量提供了高速采样系统和实时示波器可视化的优势。
利用示波器,三相电机驱动器设计人员可以在静态和动态工作条件下进行分析,查看电气和机械参数,从而详细了解驱动器性能。5系列和6系列MSO的采样和处理能力支持DQ0测量等功能,让用户能够深入了解控制系统的内部情况。而功率分析仪目前还无法实现这些功能。
结语
通过本文的介绍,读者可以全面了解如何使用示波器对三相电机驱动器进行深入的电气和机械测量,并分析测量结果以优化系统性能。希望这两篇文章能帮助您更好地掌握电机驱动器测量的核心技术,提升工作效率。
-
传感器
+关注
关注
2567文章
53145浏览量
768923 -
驱动器
+关注
关注
54文章
8711浏览量
150352 -
泰克
+关注
关注
9文章
527浏览量
95464 -
逆变器
+关注
关注
294文章
4927浏览量
211383 -
三相电机
+关注
关注
13文章
301浏览量
22220
原文标题:使用示波器对三相电机驱动器进行测量(下)
文章出处:【微信号:泰克科技,微信公众号:泰克科技】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录

用于三相电机驱动的L6386 MOSFET功率驱动器评估板AN1315
三相BLDC电机驱动器混合IC
采用高性能微控制器的三相BLDC/PMSM电机驱动器参考设计

步进电机的驱动与控制 三相步进电机的驱动电路

泰克示波器如何测量时延?
MS39531——三相无感电机驱动器






 工商网监
工商网监
评论