 想让步进电机控制更顺滑?微步控制优势与挑战全揭秘
想让步进电机控制更顺滑?微步控制优势与挑战全揭秘

步进电机依靠控制电脉冲信号的频率和数量来调控转动的步数与速度,具备分步控制的特性。为了让步进电机的控制更加顺滑,微步控制技术应运而生。以下是微步控制的优势与挑战的详细揭秘:

一、微步控制的优势
1. 提高定位精度:微步控制能将步进电机的步距角细分成更小的角度。原本电机一步的角度较大,微步控制可使电机转动的角度精确到原本步距角的几分之一甚至更小。例如,一个步进电机的物理步距角是1.8度,使用16个微步,它的分辨率就可提高到0.1125度。这种高精度的定位能力使得步进电机在需要精确控制的应用场合中表现出色,如3D打印、数控机床等。
2. 降低振动与噪音:由于电机每次转动的角度变小,整体运动更加平滑,减少了电机在低速运行时的振动和噪声。这种平滑的运动特性有助于降低机械部件的冲击和振动,进而延长设备的寿命。
3. 平滑转矩输出:在全步进模式下,转矩会在每一步有较大波动。而微步控制能让磁场和转子位置的变化更加连续和均匀,使转矩波动减小,让电机运行更加平稳。这对于需要稳定转矩输出的应用场合来说尤为重要。
二、微步控制的挑战
1. 微步位置偏差:电机内部磁场不均匀可能会导致微步位置偏差。这种偏差可能会影响电机的定位精度和运动稳定性。
2. 单步扭矩减小:微步数越高,单步扭矩越小,可能引发失步现象。失步是指转子无法按预定的步距角旋转,导致控制不准确。这对于需要高扭矩输出的应用场合来说是一个挑战。
3. 惯性影响:当惯性过大时,电机响应可能会滞后。这会影响电机的动态性能和定位精度。
4. 高速时微步控制失效:在高速运行时,微步控制可能会失效,需要切换回整步模式。这限制了微步控制在高速应用场合中的应用。
5. 电流稳定性问题:电源噪声、温度变化等因素可能会影响电流的稳定性,从而影响微步控制的精度和稳定性。
三、应对策略与发展趋势
为了克服微步控制面临的挑战,工程师们采取了多种策略。例如,通过闭环控制(如集成编码器)实时校正位置误差,提升微步有效性;增强微步控制算法,使其能够根据负载动态调整细分参数,避免失步;采用高性能的驱动器和驱动芯片来精确控制电流等。
此外,随着技术的发展和应用需求的提升,微步控制技术也在不断发展。未来的微步控制将更加注重集成化与节能设计,如将驱动与控制芯片一体化(如SoC方案),减少外围电路;采用动态的电流调节技术,在低负载时自动降低电流以减少发热等。这些改进措施将有助于进一步提升步进电机的性能和应用范围。
综上所述,微步控制技术在提升步进电机性能方面具有显著优势,但也面临一些挑战。通过不断的技术创新和改进措施,我们有理由相信未来的步进电机将更加智能化、精密化,为各行各业提供更加可靠和高效的解决方案。
审核编辑 黄宇
-
步进电机
+关注
关注
152文章
3171浏览量
149970
发布评论请先 登录
单片机怎么控制步进电机的
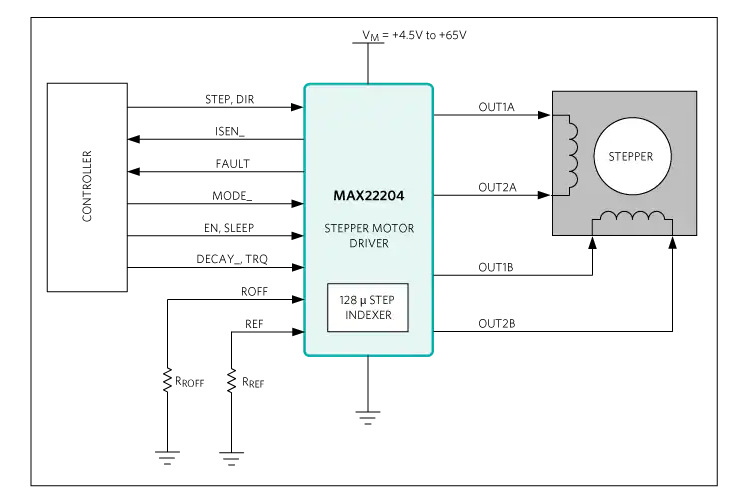
Analog Devices / Maxim Integrated MAX22204步进电机驱动器数据手册
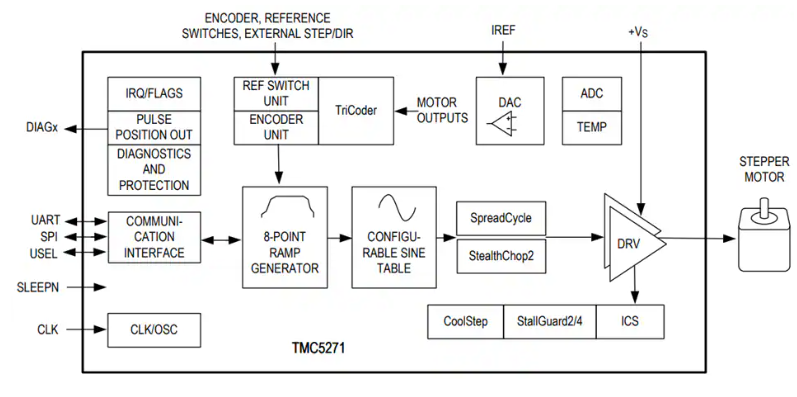
ADI Trinamic TMC5271步进电机控制器数据手册
步进电机的控制实现方法

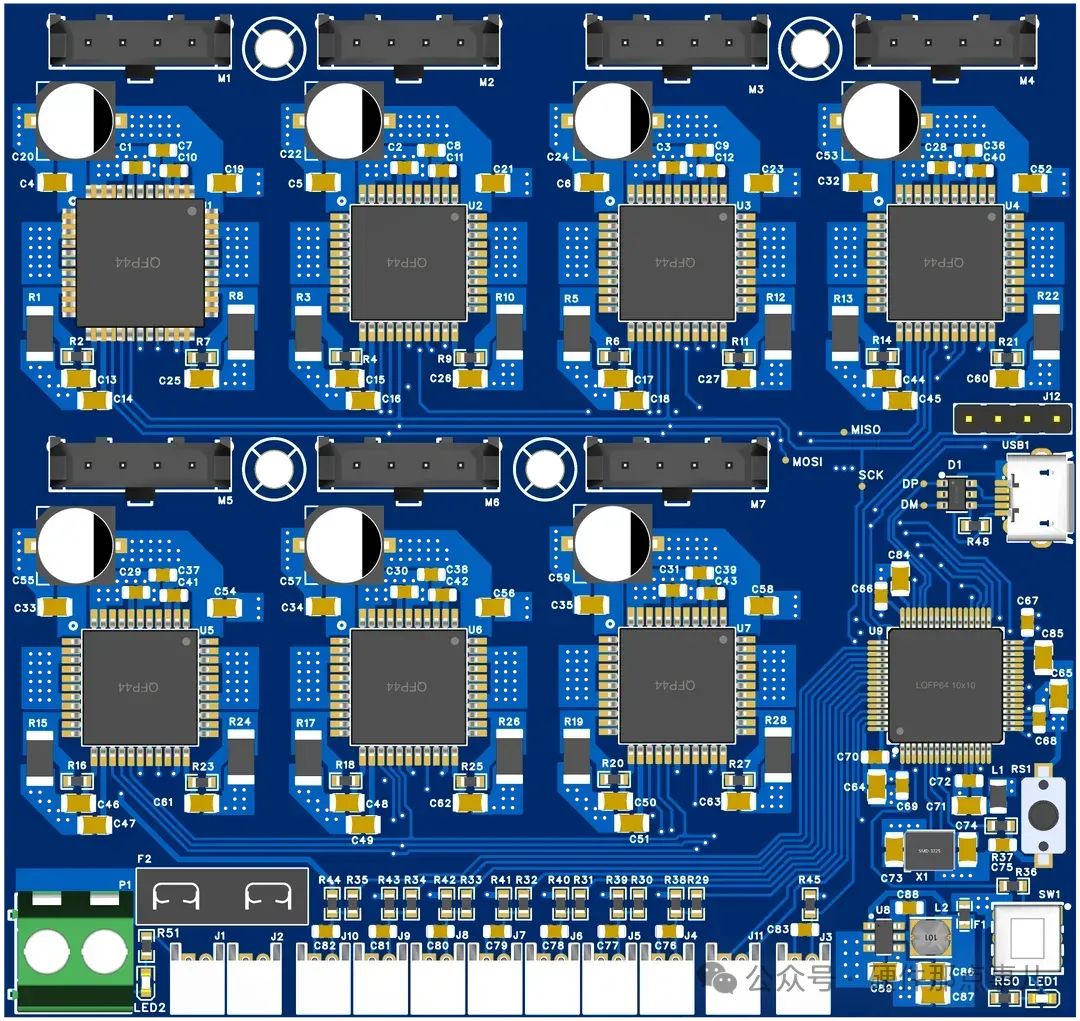
基于STM32F405RGT6的TMC2660步进电机驱动器,附带原理图+PCB
行星减速步进电机与步进电机的区别






 工商网监
工商网监
评论