 蓝牙6.0定位技术介绍和测试方案
蓝牙6.0定位技术介绍和测试方案

天下武功,唯快不破。所有试图掌控电磁波并让其服务于位置侦测的技术,无非都是看中了电磁波的“快“这一特性。确实,目前这颗星球上能够得到最快的速度,只能是光与电磁波。但是也正如同人类驯服光的过程一样,真正想掌控电磁波这把快剑,所需要的还有“准“这个杀手锏。那么,蓝牙6.0的新技术,”准“在哪儿呢?
电磁波的描述,往往包含着3个要素:振幅,波长(频率)以及相位。蓝牙的新测距技术名称并不直白,但是所用的备选技术也只能是这几种要素或者组合。在电磁波测距的历史上,2个准确度的测量始终在人类的掌控目标上,一是时间,二曰频率和相位。在此之前,不是没有人尝试过用振幅测试过距离,可空间的复杂性很快给了这个想法闷头一击,只能再次看向时间这个神奇无比的魔法师。
根据蓝牙6.0 SIG技术网站的描述,蓝牙的位置服务包含三个方案:RSS, RTT和PBR. 它们适用于不同的场景,也可能会结合使用以便于提供更安全精准的位置服务。
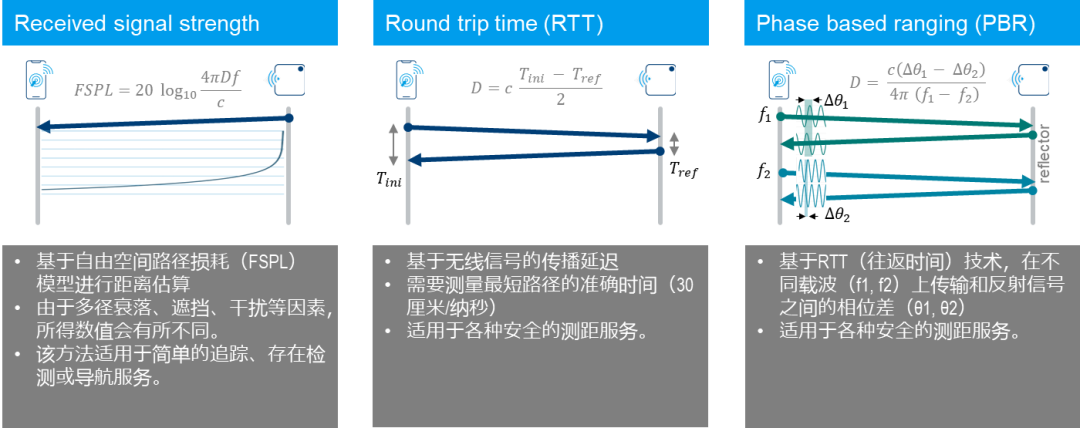
对于RSS, 我们可以根据自由空间衰落的公式得到特定频率的电磁波随距离衰减的强度,来推算发射者与接收者之间的大致距离。尽管由于空间的复杂导致结果不是那么准确,但是这种方式也可以用于标签的检测和简单的导航。
对于RTT方式,我们已经知道电磁波在空气中的传播速度。那么根据发射者的发射时间,去除接收者的处理时间,除以2,就可以得到我们想要的单程飞行时间(TOF),再乘以光速,就得到了两者之间的距离。根据之前的描述,这个方法对时间的测量要极其精准,并且保证双方的时间是一致的,才能克服光速在时间上积累巨大的距离误差,幸运的是,目前已经有很多方法能够尽可能的消除时间的差距。
那么对于PBR,又是基于什么样的原理呢?
蓝牙6.0的PBR测距,有2个角色,分别是Initiator(启动器)和Reflector(反射器)。
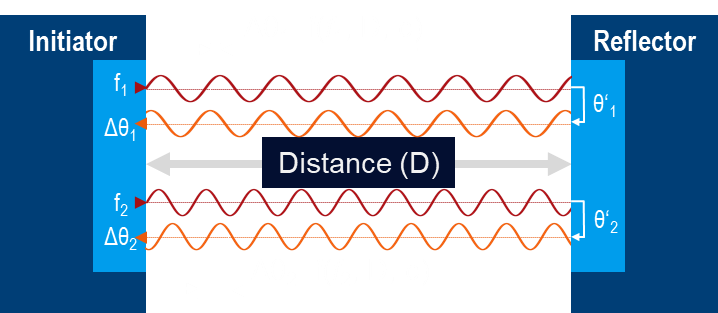
启动器是希望计算自己到反射器的距离是多少,所以会主动发起信号,我们为方便计算和分析,假定测相基频信号表示为
在Channel Sounding的流程开始前,会有同步过程,启动器和反射器之间要完成简单的时间同步,这个过程类似于BLE的Central-Master(中心设备)和Peripheral-Slave(外设)之间建立连接。这是一个简化可能的同步过程:
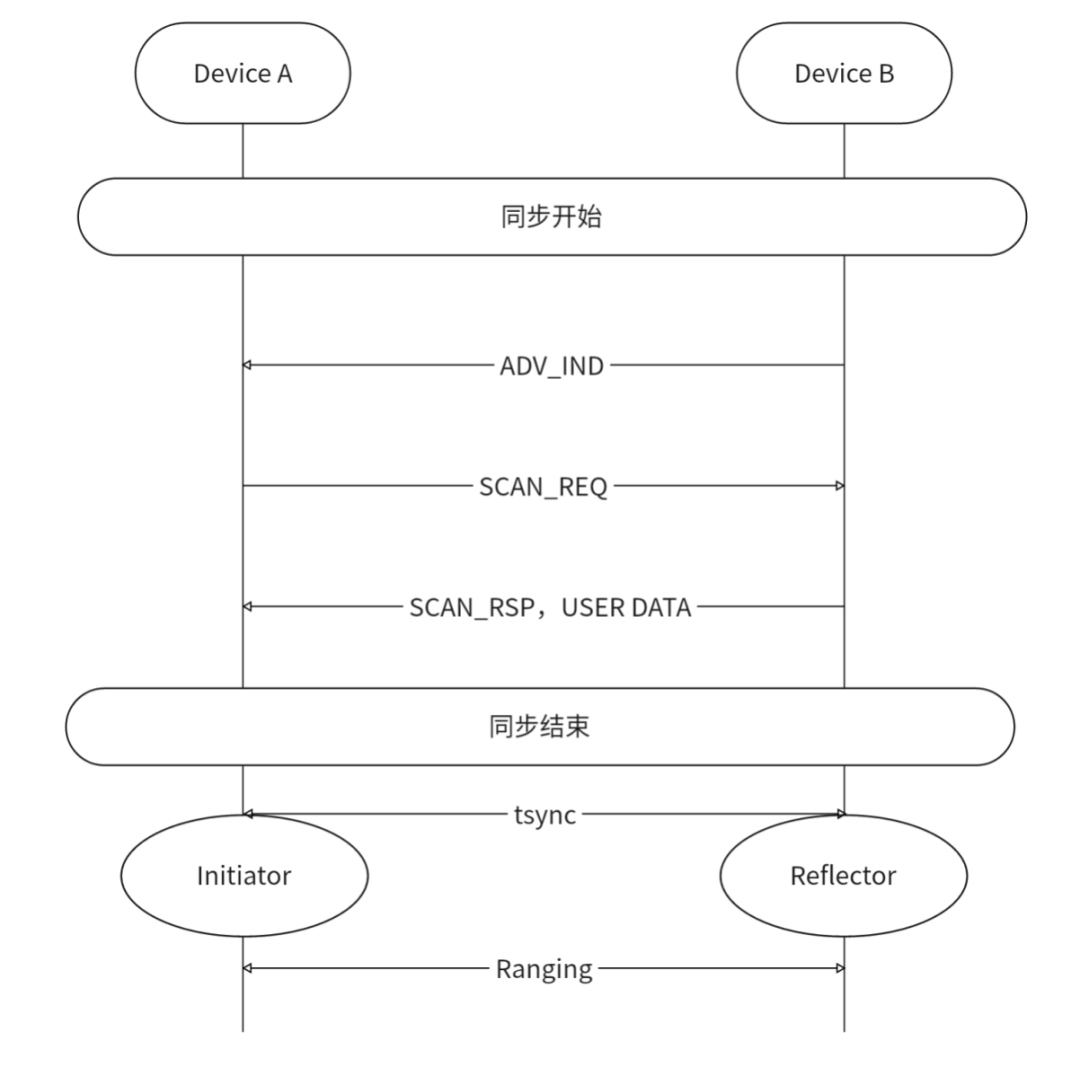
假设在tsync时刻,启动器与反射器已精准完成频率的同步fk(k= 0,1,2,3,…N-1,为第N次跳频), 并在此后的跳频频点上锁相环始终处于锁定状态,启动器发射的测相信号为 ,那么反射器收到的信号为
,那么反射器收到的信号为
反射器的本振信号为 ,进行下变频采集后的基频信号为
,进行下变频采集后的基频信号为

其中 ,为启动器和反射器的相位差。由于双方约定了已知的参考信号
,为启动器和反射器的相位差。由于双方约定了已知的参考信号 ,所以最终可以得到反射器在基带中不同时刻采样获得的相位记为
,所以最终可以得到反射器在基带中不同时刻采样获得的相位记为
同样,经过反射器发送,启动器接收后在基带中不同时刻采样获得的相位记为


如果fk以fo为起始频率,△f为频率步长进行跳频测相,即 ?, 其中N为可用频点数。我们可以得到任意两个信道间隔的相位差满足
?, 其中N为可用频点数。我们可以得到任意两个信道间隔的相位差满足

反过来 ?,我们就能根据两个信道之间频点差和相位差得到双方之间的距离。需要注意,按照此公式,对于2MHz的频率间隔,不产生相位模糊的最大距离约为75m,所以为了让相位模糊的最大距离增加,CS引入了1MHz的信道间隔,就有从CH0到CH78共79个信道,除去3个主广播信道和4个保护信道不可用,CS可用72个1MHz信号用于跳频通信。
?,我们就能根据两个信道之间频点差和相位差得到双方之间的距离。需要注意,按照此公式,对于2MHz的频率间隔,不产生相位模糊的最大距离约为75m,所以为了让相位模糊的最大距离增加,CS引入了1MHz的信道间隔,就有从CH0到CH78共79个信道,除去3个主广播信道和4个保护信道不可用,CS可用72个1MHz信号用于跳频通信。
在这整个过程中,有启动器和反射器之间的频率交互,时间交互,相位交互,这是外功。至于如何将频率做到精准,相位做到精准,算法也做到精准,这只能是精修内功了。俗话说,工欲善其事,必先利其器。对于蓝牙6.0这样的利器,去使用的话,如何确保它是真的如传说中的快和准呢?
根据之前的描述,我们知晓蓝牙Channel Sounding对频率和相位的要求极其严格,所以对启动器和反射器的测试也基本基于此结论展开。需要了解的是,在Channel Sounding的步骤中,SIG定义了4种模式,来决定步骤的目标以及在步骤种开展的活动类型,分别为模式-0、模式-1、模式-2 和模式-3,描述如下:
模式-0测量频率补偿(校准):CS SYNC 用于信道探测的数据包,其中包含一个用于同步、安全保护和往返时间估计的接入地址。
◆模式-0测量频率补偿(校准):CS SYNC 用于信道探测的数据包,其中包含一个用于同步、安全保护和往返时间估计的接入地址。
◆模式-1测量RTT
◆模式-2测量相位旋转(偏差):CS Tone 使用ASK调制技术时,符号是通过在固定频率下传输固定幅度的载波,并在特定时间持续期内发送来传递的。
◆模式-3同时测量RTT和相位偏差
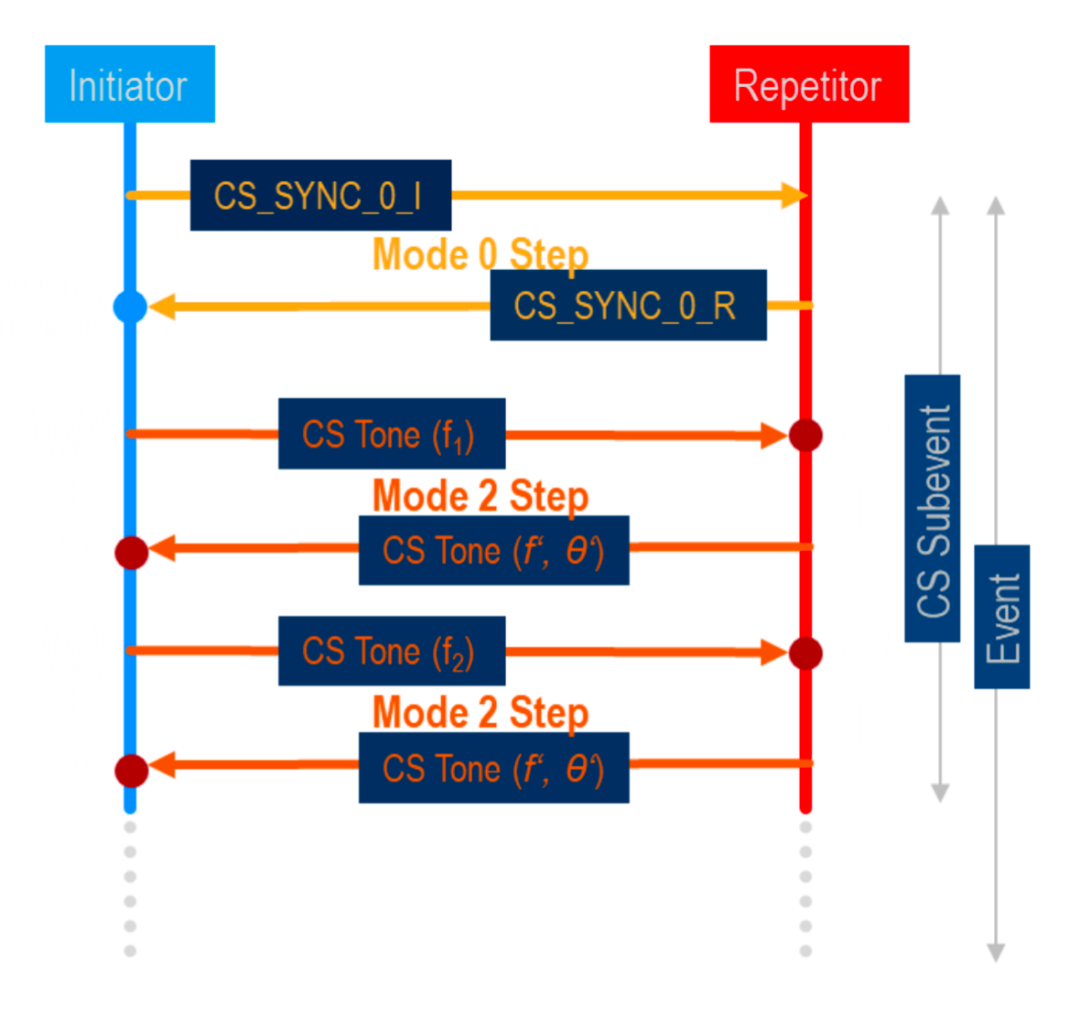
需要注意的是对模式-3 的支持不是强制性的。应用程序希望将 PBR 和 RTT 结合起来,但通过能力交换程序发现启动程序和反射程序都不支持模式-3,则可以使用结合模式-2 和模式-1 步骤的模式序列。
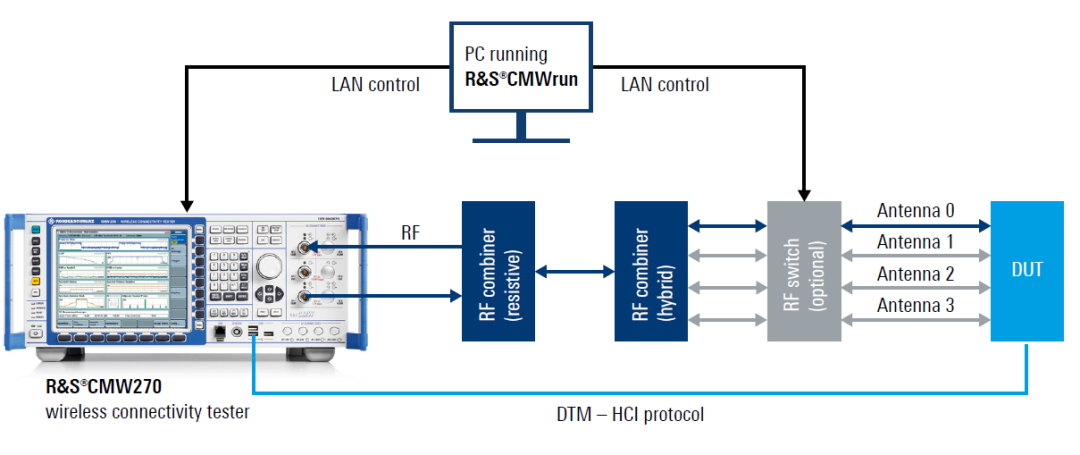
考虑到最有可能成为SIG RF-PHY认证组成部分的关键系统参数包含Phase Stability (transmit),Phase Measurement Accuracy (receive),以及Frequency Offset/stability (transmit). 还有模式-0的校准步骤。罗德与施瓦茨在CMW500/270平台上基于蓝牙技术的核心要求和测试规范,支持了新的RF-PHY(射频物理层)测试用例以确保可靠性和准确性。
同时,基于CMW500/270平台的自动化工具,R&SCMWrun序列器软件工具中包含了一个现成的测试用例计划,该计划全面覆盖了所有CS预符合性RF-PHY(射频物理层)测试用例。测试用例可以单独运行,也可以与完整的预符合性测试一起运行,并生成测试报告。R&SCMWrun序列器软件工具还会在每次测试运行后生成日志文件,使得回归测试和预符合性测试变得比以往更加容易。
以下是部分测试结果:
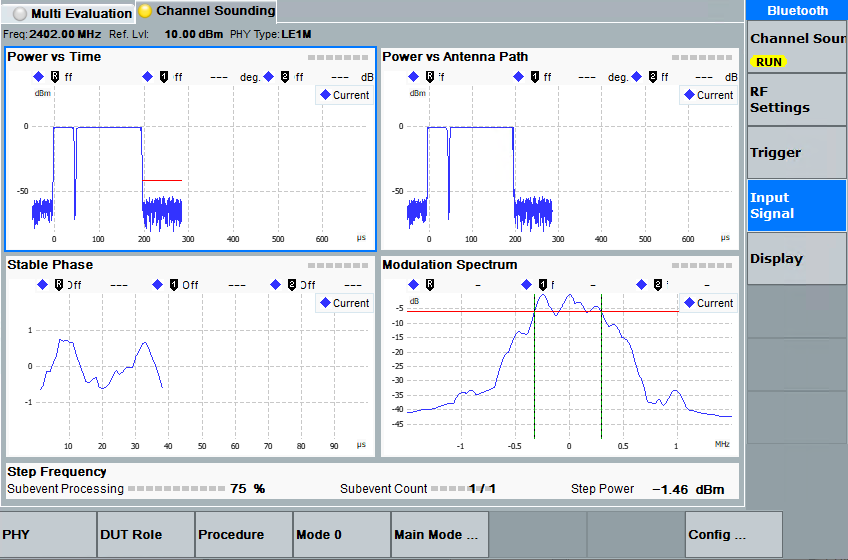
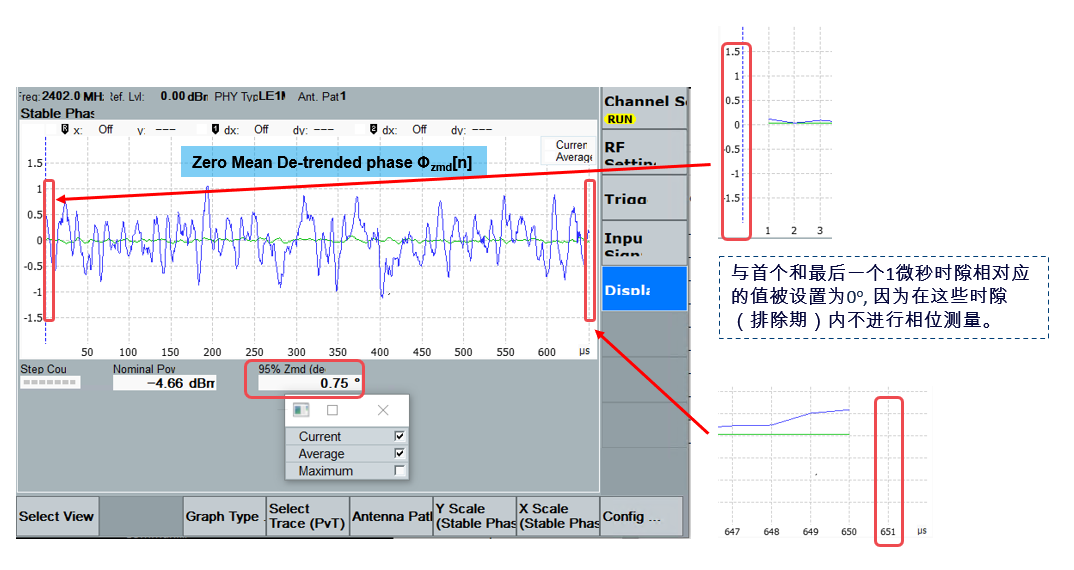
稳定相位的测量基于模式-2和模式-3的过程中。
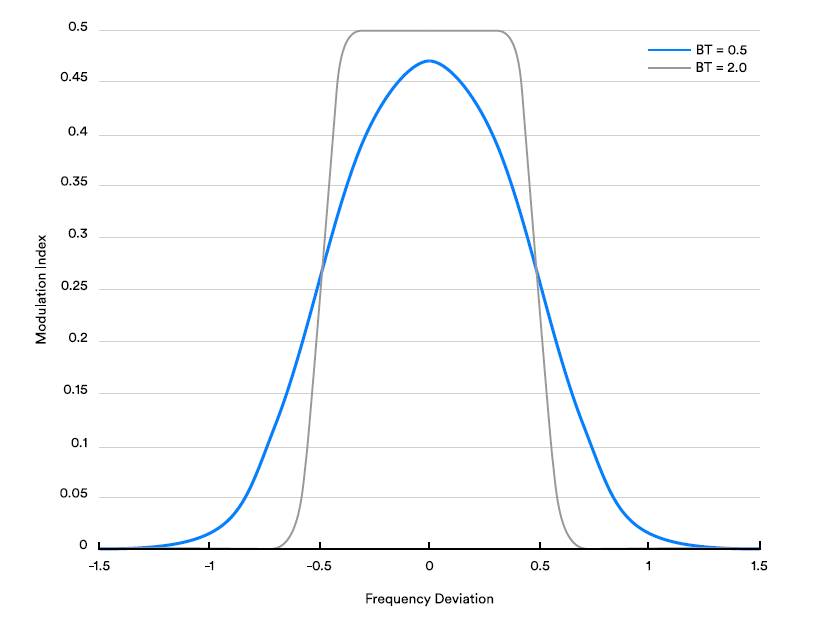
R&S根据最新的SIG RF-PHY规范推出了CS的解决方案,在CS的发布过程中,也提到了对于信号安全性和健壮性的需求,比如CS伴随信号以及新调制LE 2M 2BT PHY。这种主要解决RTT过程中的安全问题的脉冲类型,其原理是,有许多已知的物理层攻击涉及中间人(MITM)攻击者预测从合法发射设备接收到的部分符号的值,并转发这些符号的完整、生成版本,同时操纵时间,使合法接收者误算往返时间,从而误算距离。攻击者的信号通常会被放大,这样目标设备就会将被操纵的信号视为主要信号,而不是较弱的原始信号,因为原始信号很可能看起来像反射信号。持续时间较长的符号比持续时间较短的符号更容易受到这种攻击。
LE 2M 2BT PHY 的带宽比特周期乘积值为 2.0(普通为0.5),其符号脉冲的持续时间比其他 PHY 的相关脉冲短,从而降低了此类攻击的风险。
可以预见的是,后续的Channel Sounding版本会对这些特性进一步优化,以提升测距相关的体验。R & S在蓝牙技术的发展过程中,始终伴随并推动着技术标准的优化和落地。在未来的蓝牙测试方案中,我们会推出更方便行业发展的新的测试内容和测试方式,以供选择。
后 记
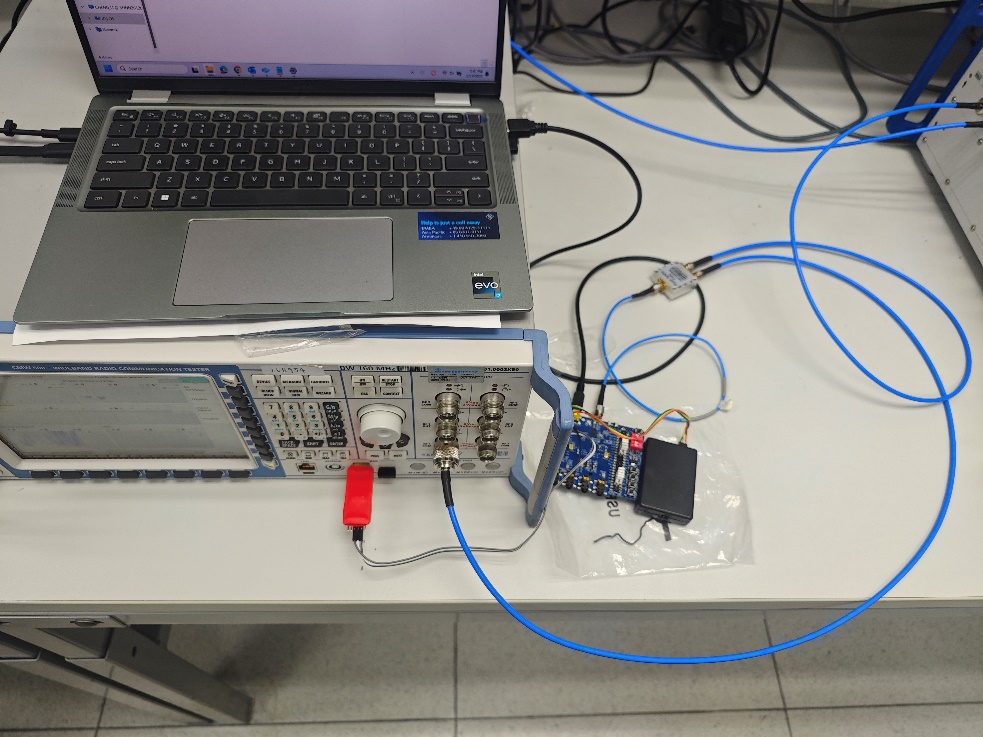
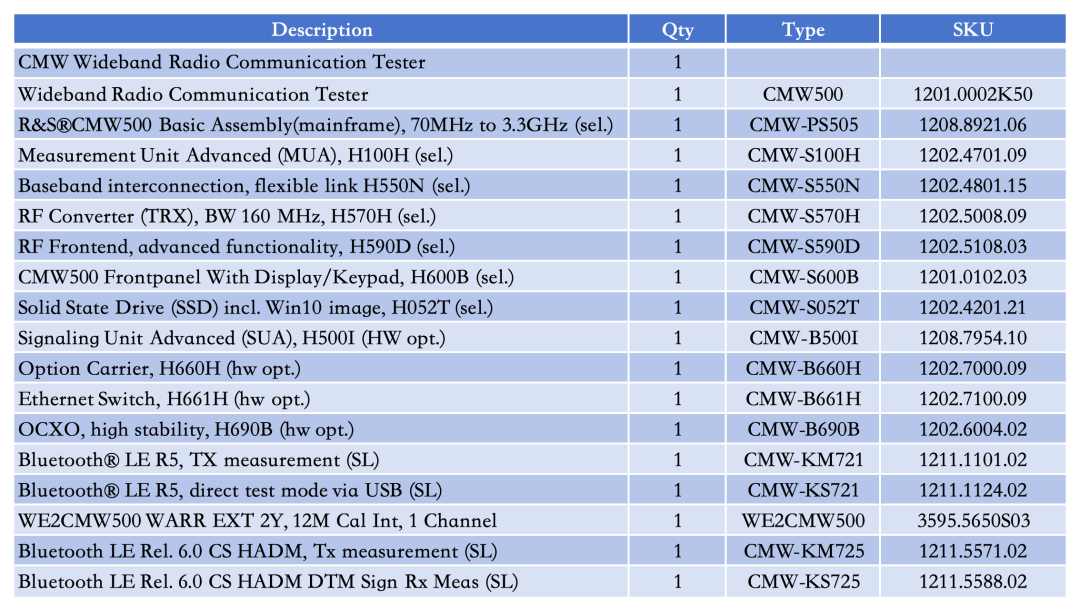
罗德与施瓦茨(Rohde & Schwarz)提供的蓝牙低功耗(Low Energy)信道探测测试与测量解决方案采用R&SCMW平台,全面覆盖产品设计过程中的所有验证需求,包括功能测试、射频(RF)参数测量以及生产要求。配合R&SCMWrun,现成的测试计划可确保回归测试和预符合性测试的效率。完整方案配置如下:
罗德与施瓦茨业务涵盖测试测量、技术系统、网络与网络安全,致力于打造一个更加安全、互联的世界。成立90 年来,罗德与施瓦茨作为全球科技集团,通过发展尖端技术,不断突破技术界限。公司领先的产品和解决方案赋能众多行业客户,助其获得数字技术领导力。罗德与施瓦茨总部位于德国慕尼黑,作为一家私有企业,公司在全球范围内独立、长期、可持续地开展业务。
-
蓝牙
+关注
关注
116文章
6092浏览量
174414 -
定位技术
+关注
关注
7文章
303浏览量
25970 -
电磁波
+关注
关注
21文章
1487浏览量
54855 -
罗德与施瓦茨
+关注
关注
9文章
567浏览量
46296
原文标题:【行业方案】国王的剑锋--蓝牙6.0定位技术介绍和测试
文章出处:【微信号:罗德与施瓦茨中国,微信公众号:罗德与施瓦茨中国】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
常用的室内定位方案技术中,蓝牙定位为什么能脱颖而出?
定位方案 I 为何自连采用蓝牙定位技术?

基于新型蓝牙技术的人员定位方案
?利用蓝牙AOA定位技术助力医院人员管理方案

蓝牙6.0,厘米级定位+超低功耗,你的设备该升级了!






 工商网监
工商网监
评论