 发那科ROBOGUIDE机器人仿真助手入门
发那科ROBOGUIDE机器人仿真助手入门

发那科ROBOGUIDE
专门为发那科机器人设计
本文给大家分享一下
ROBOGUIDE入门-创建项目
在开始操作前
要先安装好ROBOGUIDE软件
ROBOGUIDE创建项目
创建流程:
01打开ROBOGUIDE
02进入工作单元创建向导
03等待软件生成,完成创建
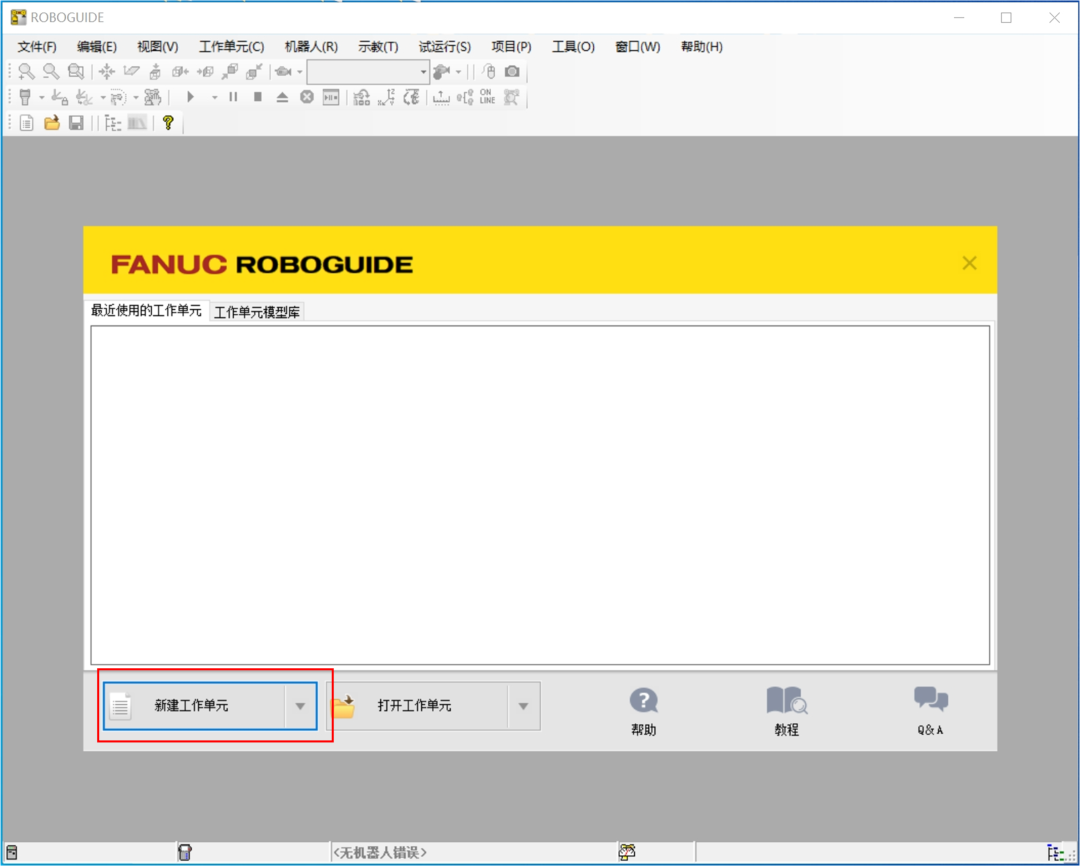
01打开ROBOGUIDE
打开软件后,如下图所示。然后点击新建工作单元
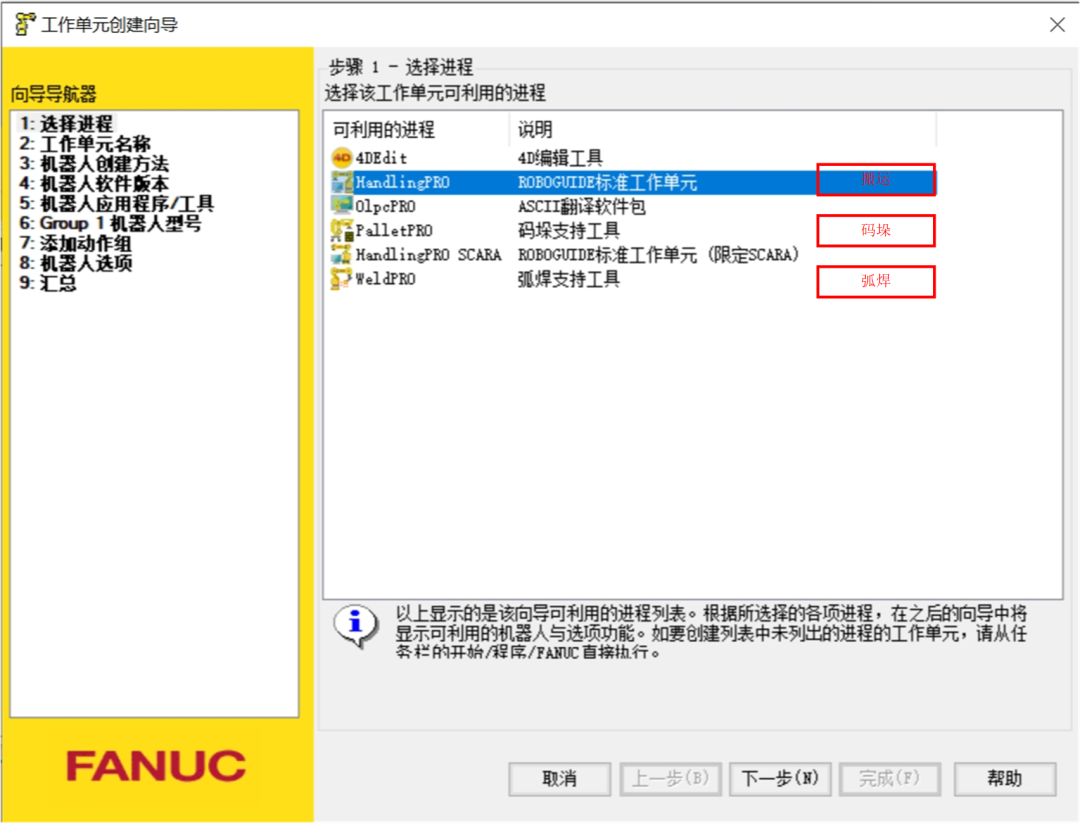
02进入工作单元创建向导
2.1 在工作单元创建向导,选择“HandlingPRO”,即搬运工具(本例以搬运机器人进行举例说明),点击下一步;
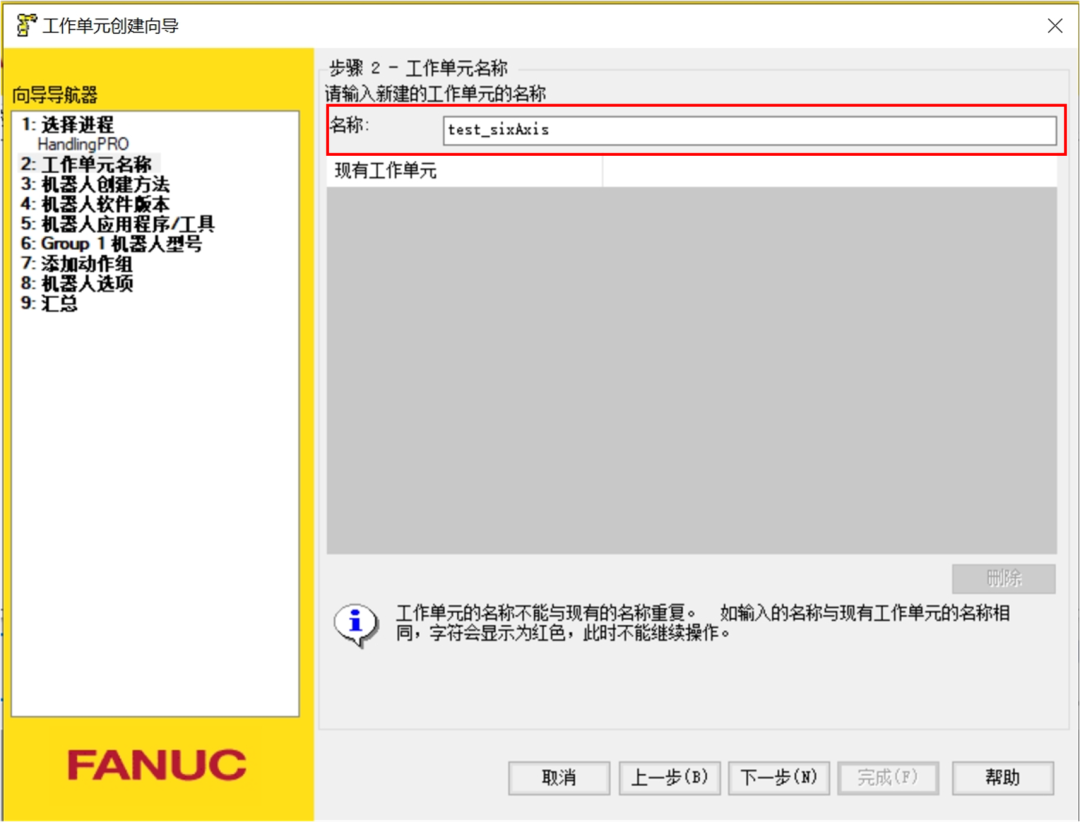
2.2 如下图所示,设置工作单元的名称,点击下一步;
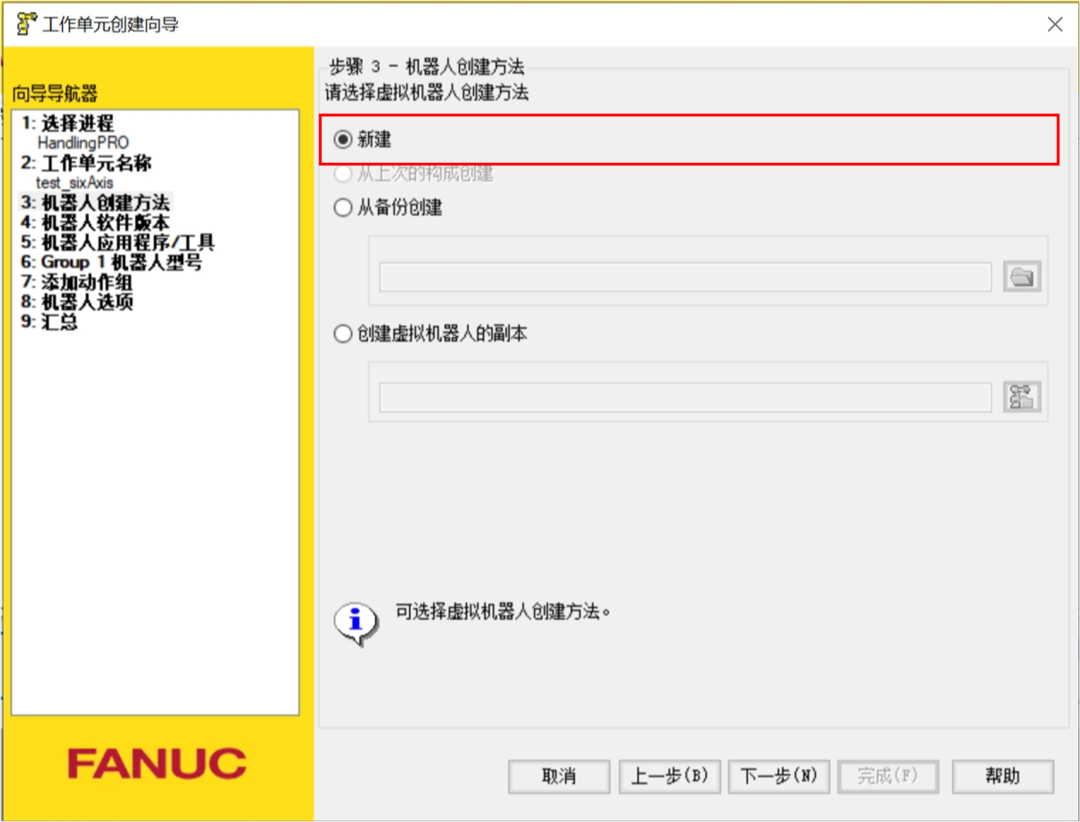
2.3 机器人的创建方法,选择新建,点击下一步;
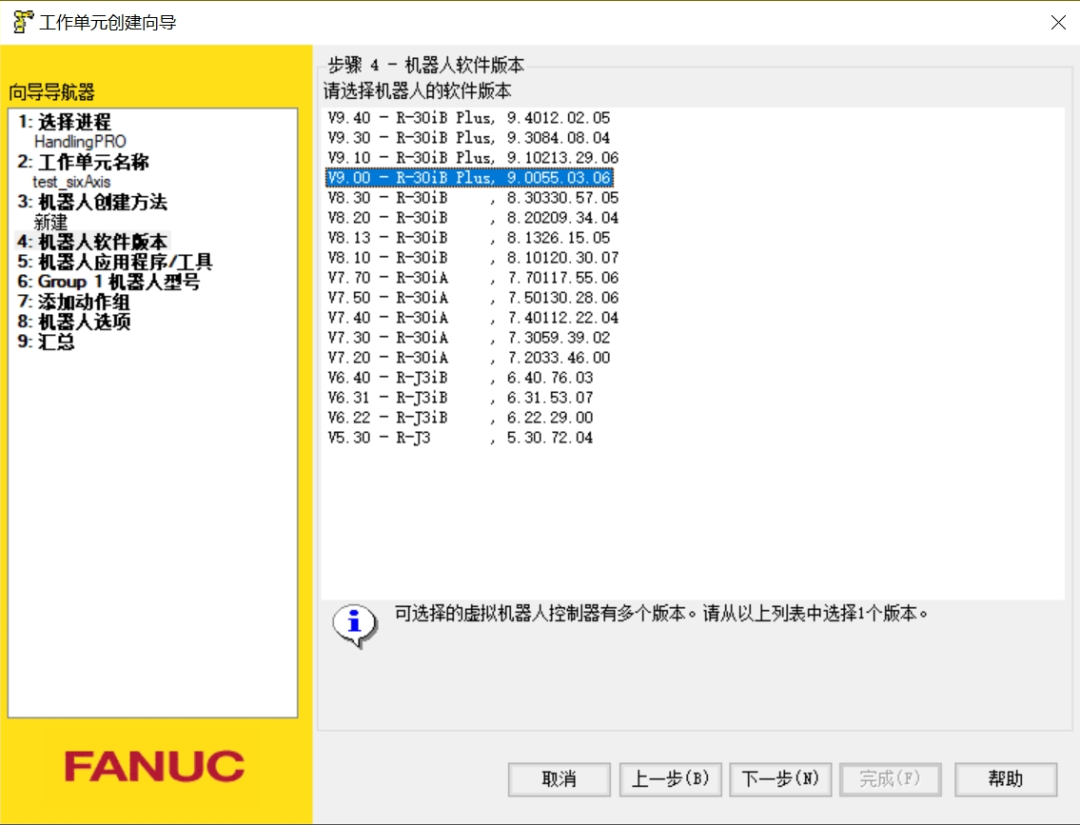
2.4 选择机器人软件版本(一般选择最高版本),这里以V9.00-R-30iB Plus为例,点击下一步;
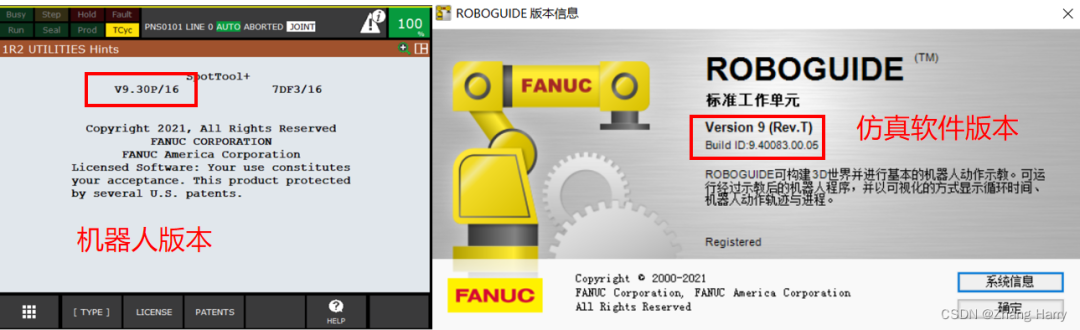
注:软件版本需要与现场机器人对应,如果想直接导入现场机器人的备份来生成一个仿真机器人,必须要Roboguide软件版本不低于现场机器人版本。比如V9.3、V9.4版本的软件可以打开V9.3机器人的备份,V9.1就不行。
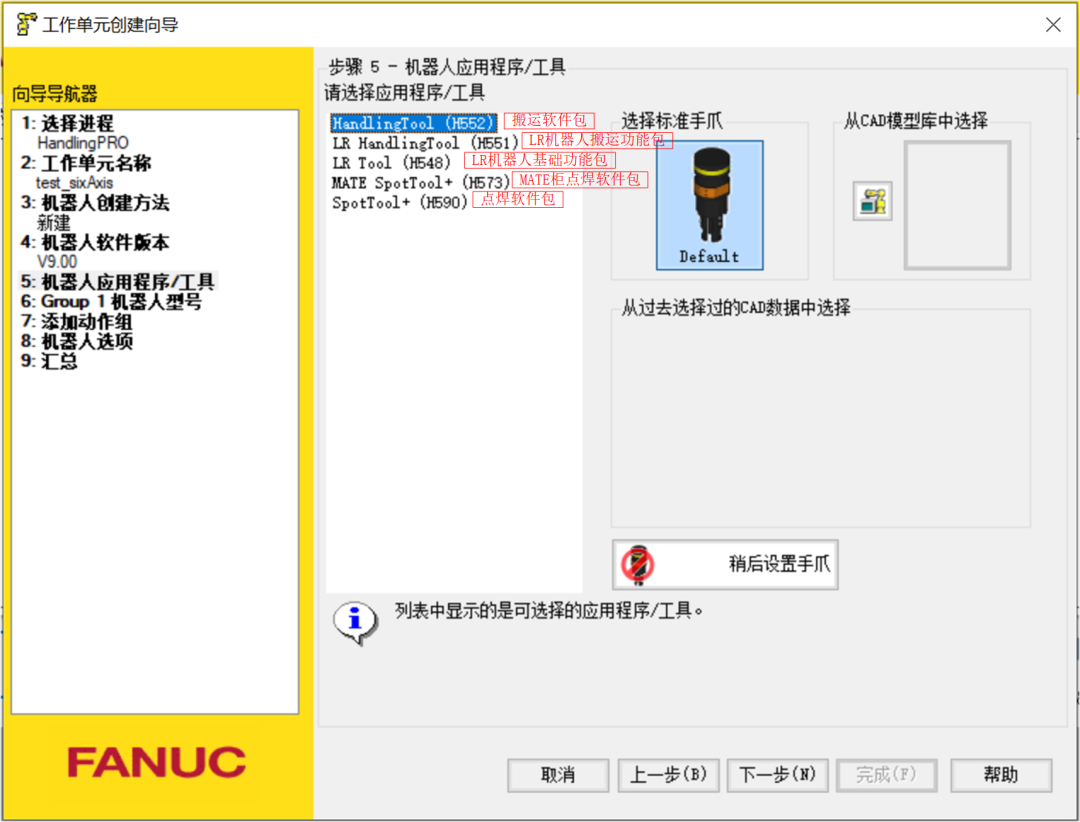
2.5 选择机器人应用程序,本文为搬运,所以选择搬运软件包,点击下一步;
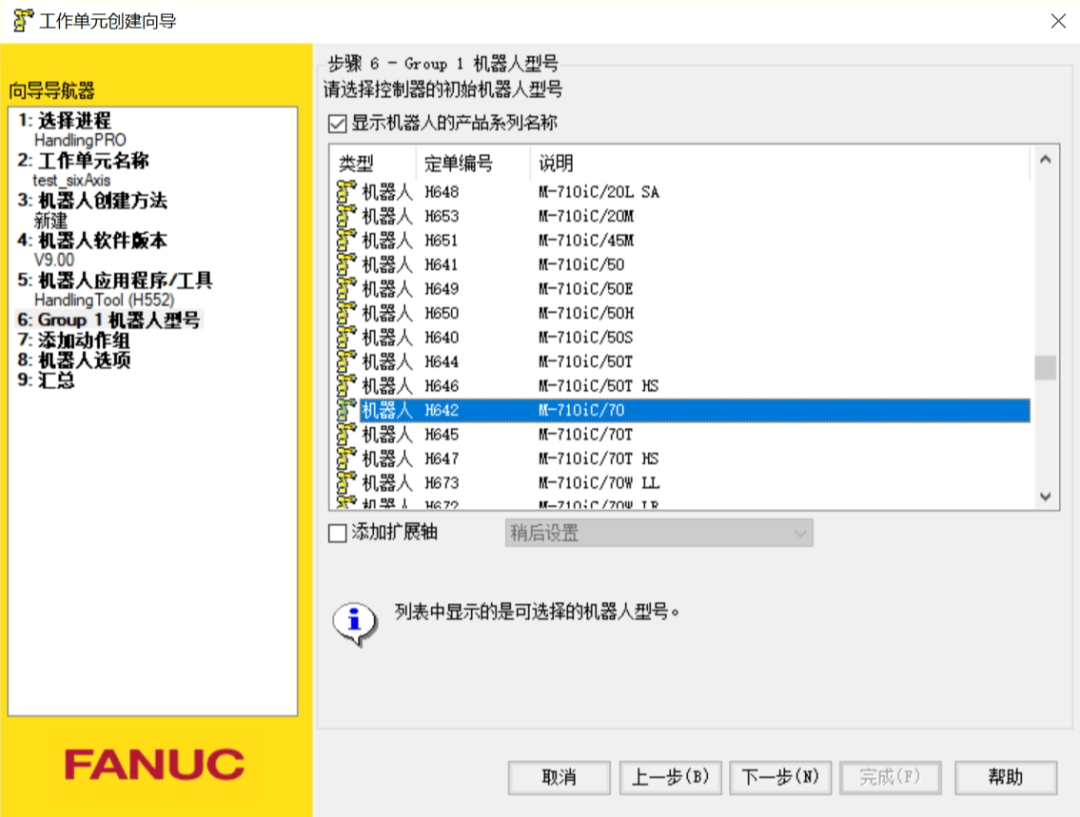
2.6 选择机器人型号(如果选型错误,可以在创建之后再更改),本文选择H642,点击下一步;
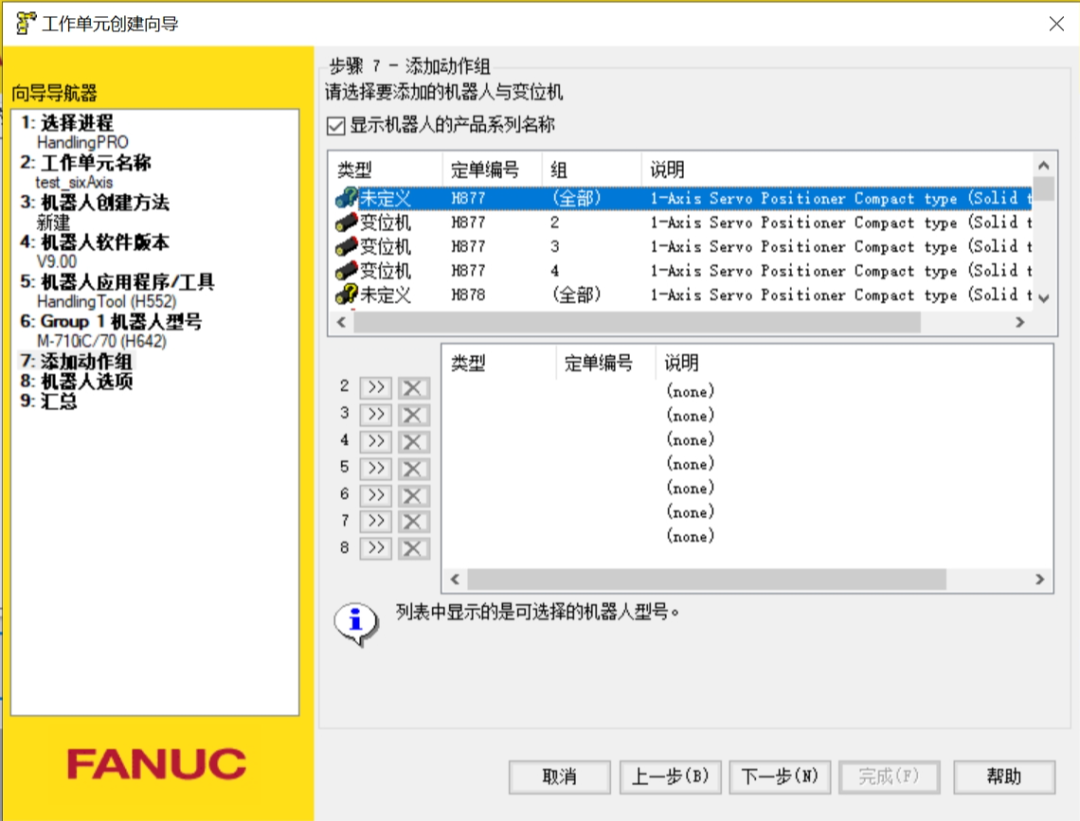
2.7 添加动作组,本文选择未定义H877,点击下一步;
添加完机器人本体后可以添加附加设备。可以选择在同一控制柜中继续添加额外的机器人(也可在建立Workcell之后添加),还可添加Group2~8的设备,如变位机等。
注意:
1.在添加Group2~8内的设备时需要依次添加,不能跳组;
2.在列表中选择变位机等设备时,设备信息中带有添加组限制的只能添加在限制的对应组内;
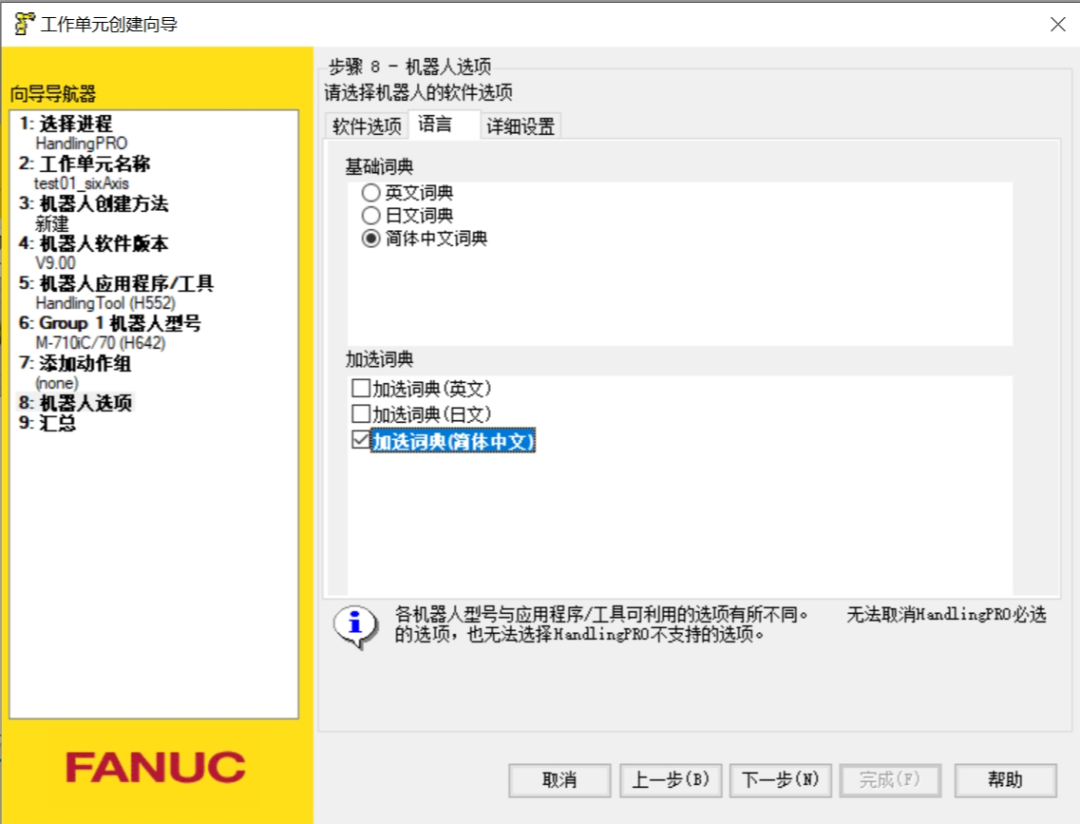
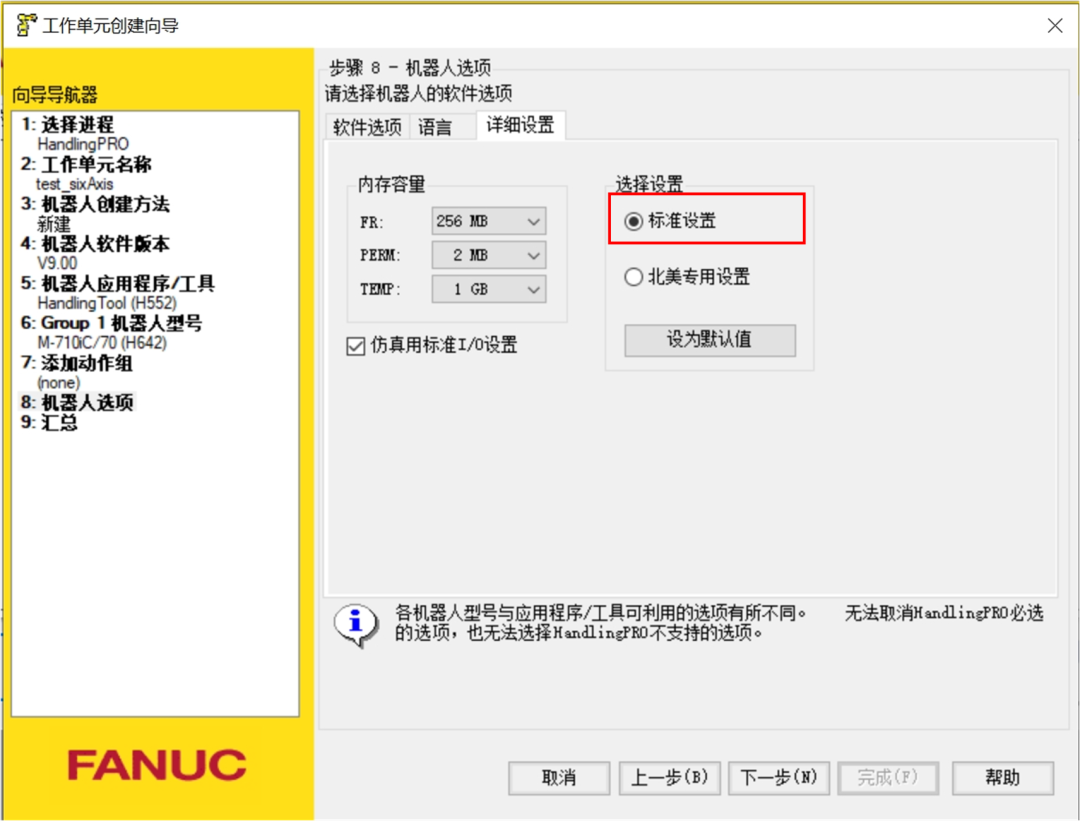
2.8 进行机器人选项:软件选项、语言、详细设置,点击下一步;
添加各种应用类型内的软件功能,将它们用于仿真,添加较多的功能应用是搬运中的附加轴控制、码垛、点焊中的伺服枪设置、弧焊中的协同等。
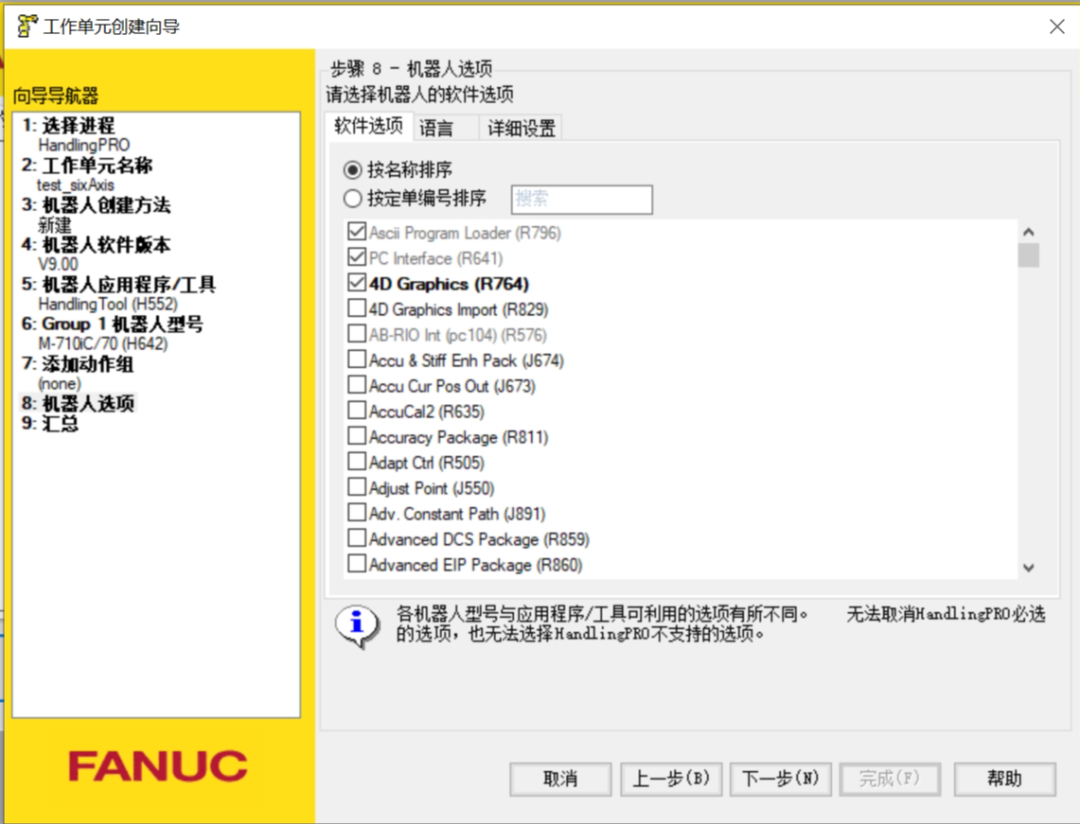
软件选项–4D Graphics(R764)
语言–加选词典(简体中文)
详细设置–标准设置
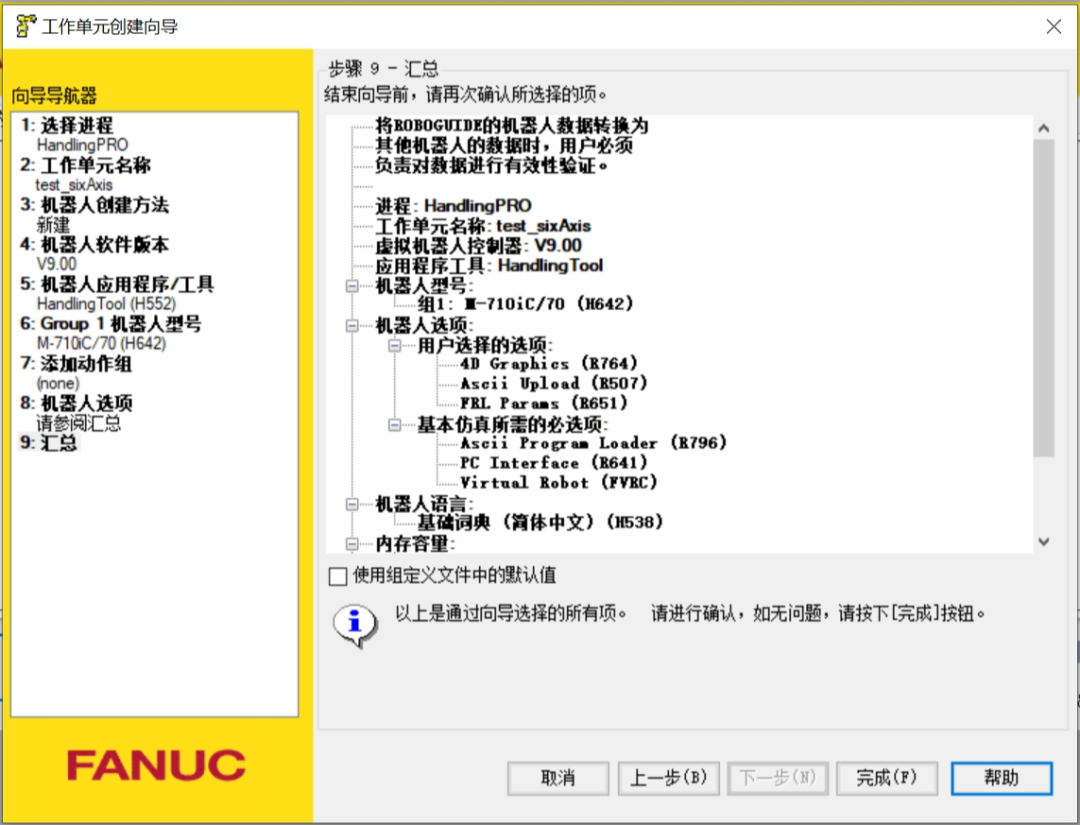
2.9 汇总,显示当前设置和选择的所有参数,点击完成;
03等待软件生成,完成创建
等待软件生成
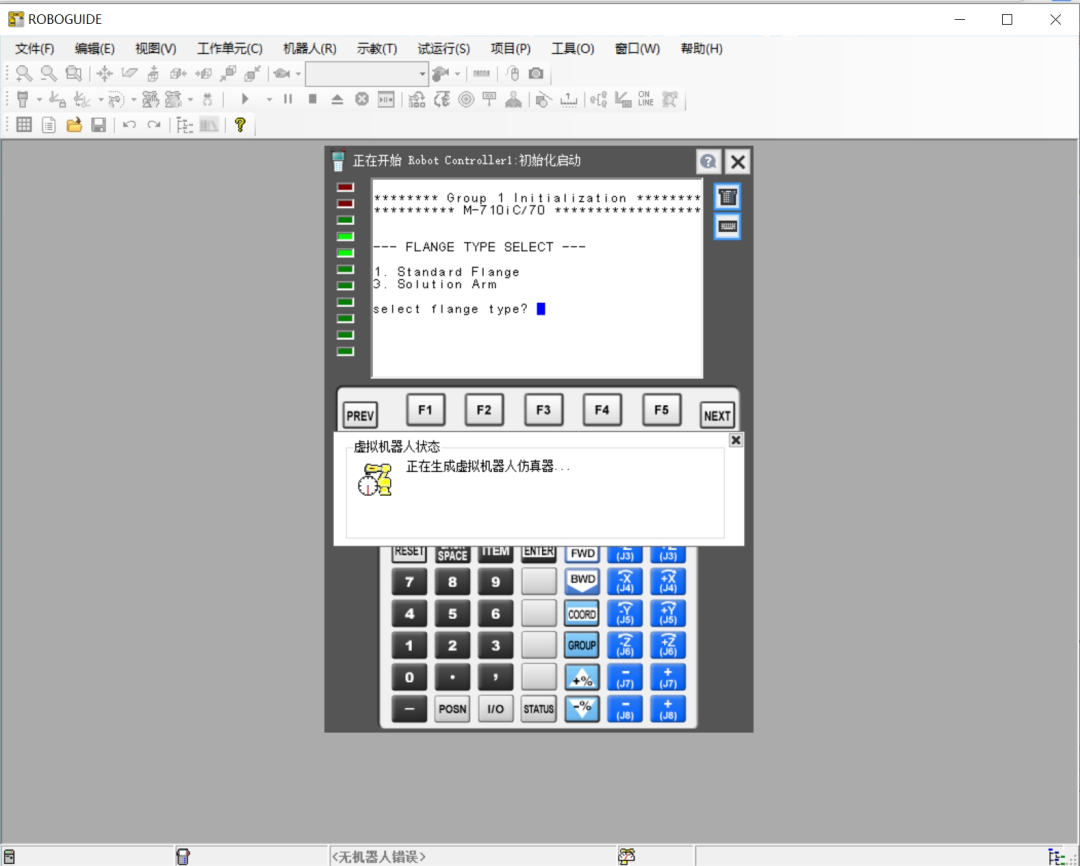
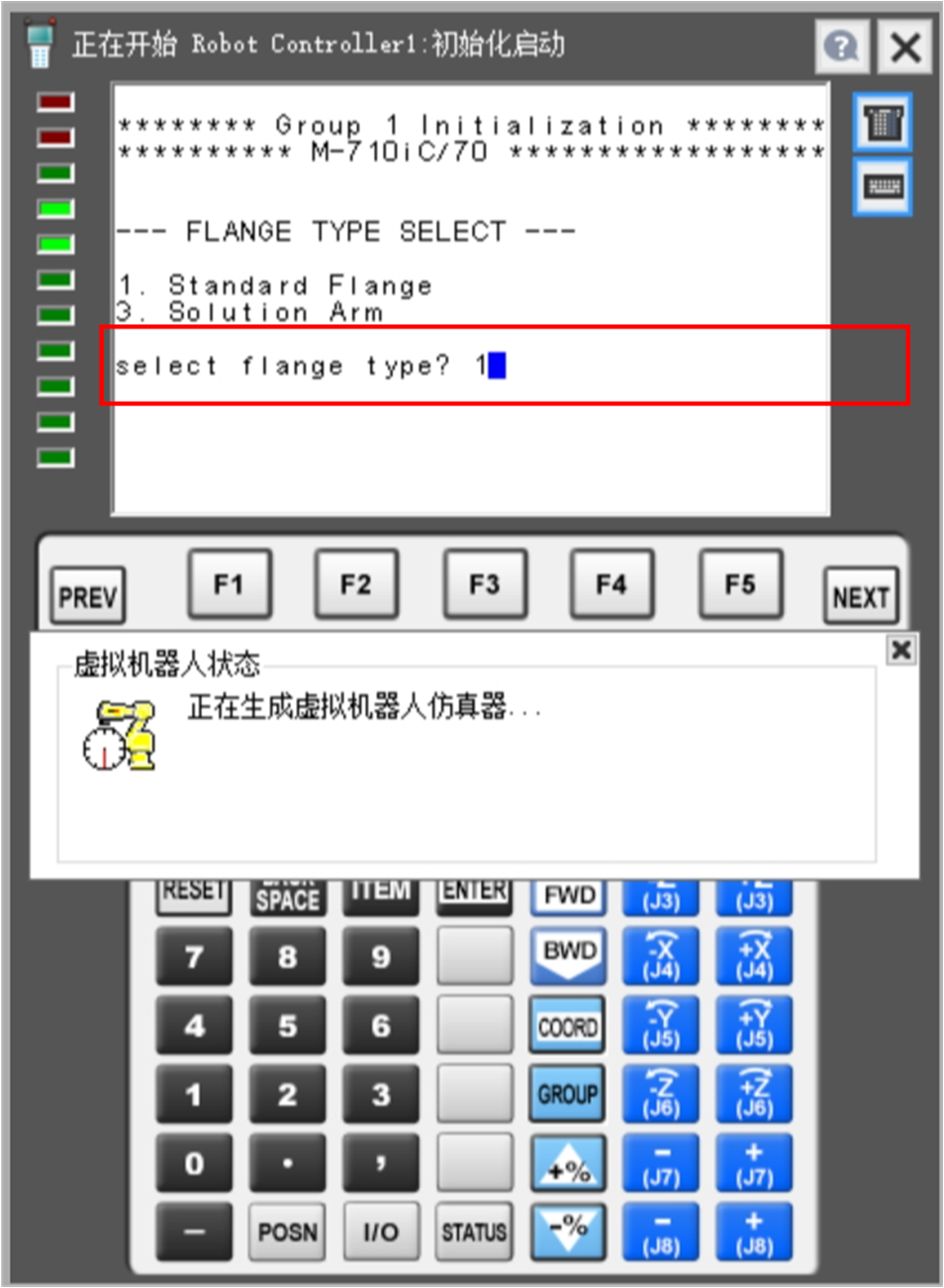
输入选项1,然后点击键盘回车,等待初始化;
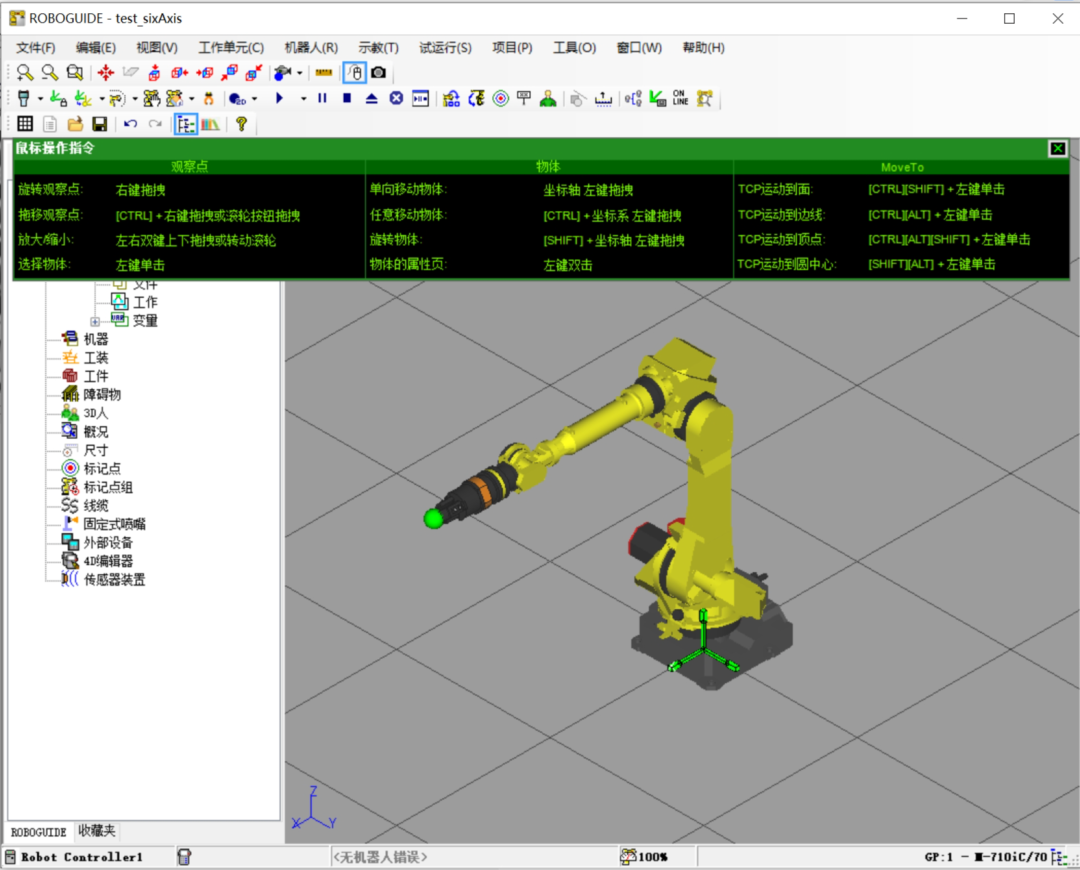
完成创建
-
机器人
+关注
关注
213文章
29832浏览量
213680 -
仿真
+关注
关注
52文章
4302浏览量
136083 -
发那科
+关注
关注
5文章
102浏览量
14199 -
Roboguide
+关注
关注
0文章
3浏览量
1711
原文标题:发那科ROBOGUIDE软件入门-创建项目(文末附软件免费领取地址)
文章出处:【微信号:指南车机器人科技,微信公众号:指南车机器人科技】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
工业机器人的特点
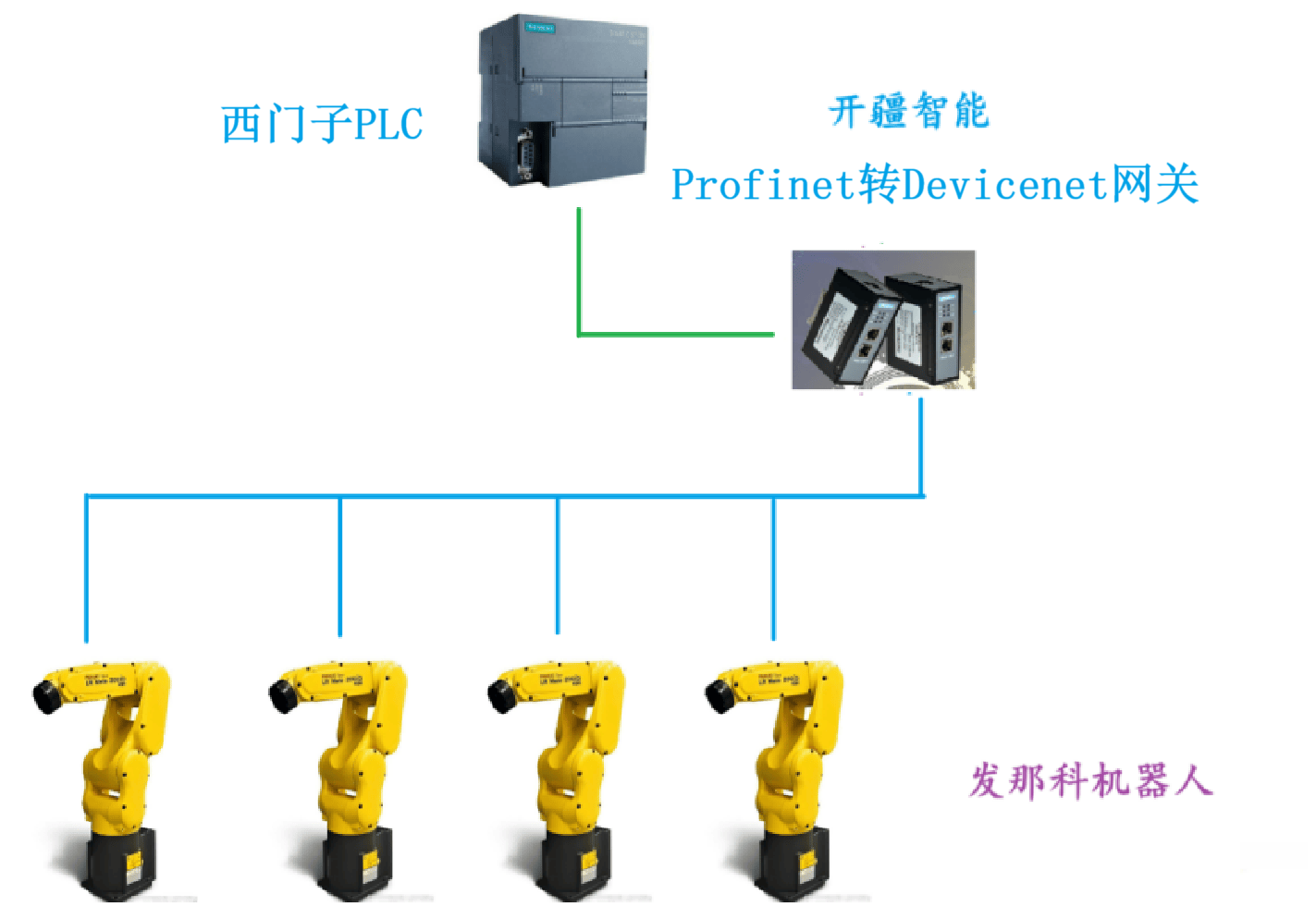
开疆智能Profinet转Devicenet网关连接发那科机器人配置案例
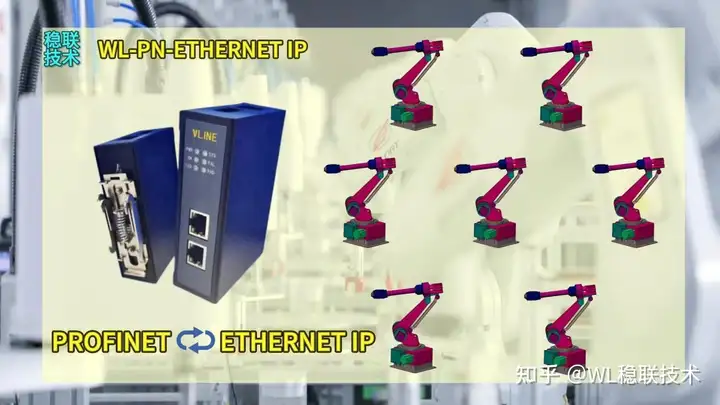
速看!发那科机器人做为profinet转ethernetip主站参数设置,每步都关键

盘点#机器人开发平台
【「# ROS 2智能机器人开发实践」阅读体验】机器人入门的引路书
【「# ROS 2智能机器人开发实践」阅读体验】+内容初识
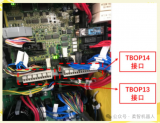
发那科机器人A型控制柜急停板安全回路接线方法
国产重载机器人胜算几何
从“零”到“联”:Profinet转Ethernet/IP网关搞定发那科机器手臂
名单公布!【书籍评测活动NO.58】ROS 2智能机器人开发实践
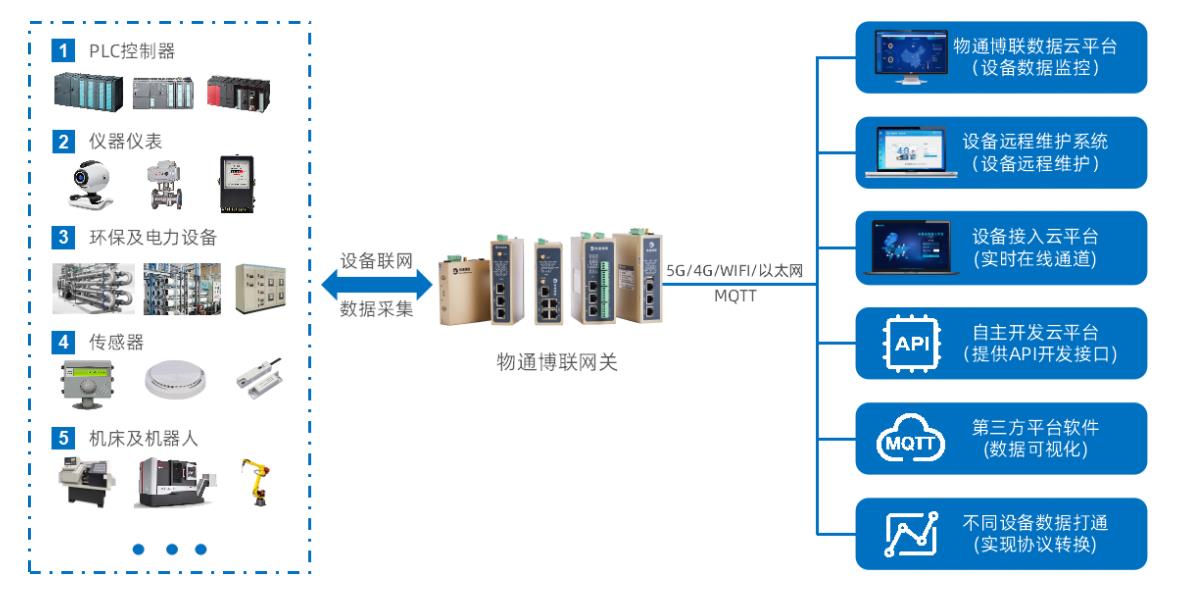
发那科机器人数据采集网关有哪些功能
开疆智能Profient转DeviceNET主网关连接发那科机器人配置案例
EtherNetIP转Profinet网关连接发那科机器人配置实例解析







 工商网监
工商网监
评论