 一微半导体:SLAM专用芯片为机器人系统实现高效率建图导航复杂运算
一微半导体:SLAM专用芯片为机器人系统实现高效率建图导航复杂运算

电子发烧友网报道(文/李宁远)2024年5月17日,由中国半导体行业协会集成电路设计分会和芯原微电子(上海)股份有限公司主办的“第十四届松山湖中国IC创新高峰论坛”在东莞松山湖举办。珠海一微半导体股份有限公司机器人事业部总经理杨武在论坛上介绍了面向机器人的SLAM专用芯片AM890。

珠海一微半导体股份有限公司是一家以机器人技术及大规模高集成度数模混合芯片设计为主的国家高新技术企业,拥有数模混合集成电路(SoC)设计、机器人算法、机器人开发平台等多项前沿技术及大规模芯片量产经验,致力于成为全球移动机器人领域核心芯片、核心算法以及系统解决方案的主流技术平台,是移动机器人专用芯片领域的领航者。
杨武介绍了目前机器人市场的市场数据,机器人市场正在蓬勃增长,而SLAM技术是机器人里的关键技术。SLAM技术是即时定位与地图构建技术,主要的作用是机器人或无人设备从未知环境的未知地点出发,在运动过程中通过重复观测到的地图特征来定位自身位置和姿态,再根据自身位置增量式的构建地图,从而达到同时定位和地图构建的目的。
一微半导体是国内少有的能同时提供惯性导航eSLAM、激光SLAM导航和视觉导航vSLAM芯片、算法及完整解决方案的供应商,专用SLAM芯片在众多国内外机器人品牌上被采用。AM890是一微半导体推出的机器人SoC主控芯片,专为建图导航的复杂运算而生。
在同等场景下,AM890的运算速度是通用SoC的3-8倍,整体功耗只有通用SoC的五分之一。与国外知名厂商的机器人平台对比,在计算量相同的条件下,AM890计算时间远小于竞品。
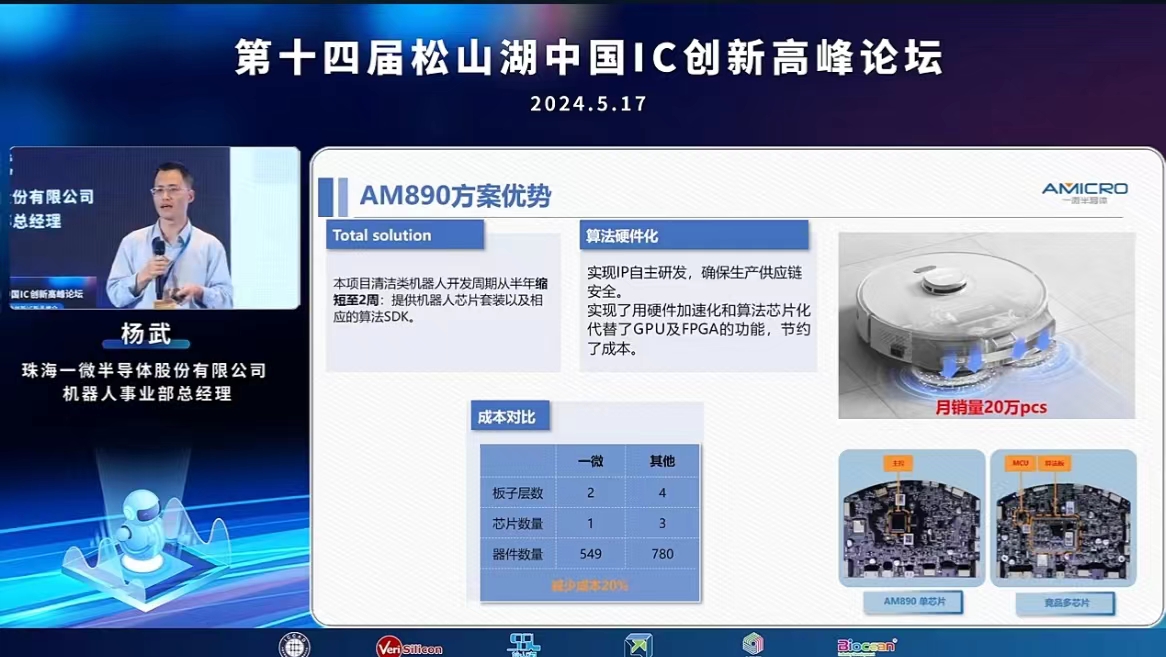
杨武还提到,AM890将SLAM算法硬件化,实现了IP自主研发,用硬件加速和算法芯片化提嗲了GPU和FPGA功能,进一步节约了成本。未来,一微半导体还将持续耕耘智能机器人算法与机器人运控单芯片,为机器人系统实现高效率建图导航复杂运算。
珠海一微半导体股份有限公司机器人事业部总经理 杨武
珠海一微半导体股份有限公司是一家以机器人技术及大规模高集成度数模混合芯片设计为主的国家高新技术企业,拥有数模混合集成电路(SoC)设计、机器人算法、机器人开发平台等多项前沿技术及大规模芯片量产经验,致力于成为全球移动机器人领域核心芯片、核心算法以及系统解决方案的主流技术平台,是移动机器人专用芯片领域的领航者。
杨武介绍了目前机器人市场的市场数据,机器人市场正在蓬勃增长,而SLAM技术是机器人里的关键技术。SLAM技术是即时定位与地图构建技术,主要的作用是机器人或无人设备从未知环境的未知地点出发,在运动过程中通过重复观测到的地图特征来定位自身位置和姿态,再根据自身位置增量式的构建地图,从而达到同时定位和地图构建的目的。
一微半导体是国内少有的能同时提供惯性导航eSLAM、激光SLAM导航和视觉导航vSLAM芯片、算法及完整解决方案的供应商,专用SLAM芯片在众多国内外机器人品牌上被采用。AM890是一微半导体推出的机器人SoC主控芯片,专为建图导航的复杂运算而生。
在同等场景下,AM890的运算速度是通用SoC的3-8倍,整体功耗只有通用SoC的五分之一。与国外知名厂商的机器人平台对比,在计算量相同的条件下,AM890计算时间远小于竞品。
杨武还提到,AM890将SLAM算法硬件化,实现了IP自主研发,用硬件加速和算法芯片化提嗲了GPU和FPGA功能,进一步节约了成本。未来,一微半导体还将持续耕耘智能机器人算法与机器人运控单芯片,为机器人系统实现高效率建图导航复杂运算。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
213文章
29922浏览量
214311 -
SLAM
+关注
关注
24文章
445浏览量
32597
发布评论请先 登录
相关推荐
热点推荐
从边界线到 SLAM,割草机器人导航定位的下一个关键技术是它?
是割草机器人实现智能化、高效化作业的核心支撑,通过 GNSS(如北斗、RTK)、视觉 SLAM、激光雷达等技术,割草机器人可以
明远智睿SSD2351开发板:语音机器人领域的变革力量
的四核1.4GHz处理器具备强劲的运算性能,能够高效处理语音机器人运行过程中的复杂任务。语音识别和合成需要大量的计算资源,该处理器可以快速对语音信号进行分析、处理和转换。在实时语音交互
发表于 05-28 11:36
【「# ROS 2智能机器人开发实践」阅读体验】视觉实现的基础算法的应用
的有效途径。
结语
本书第7章和第8章内容系统性强,从基础理论到代码实践,为读者提供了机器人视觉与SLAM的完整知识框架。未来,我计划结合书中案例,进
发表于 05-03 19:41
【「# ROS 2智能机器人开发实践」阅读体验】+ROS2应用案例
这一部分内容,我掌握了如何在ROS 2中实现SLAM,这对于提高机器人的自主导航能力具有重要意义。
其他内容概述
除了二维码识别和
发表于 04-27 11:42
【「# ROS 2智能机器人开发实践」阅读体验】+内容初识
、Gazebo仿真(含RGBD相机/激光雷达仿真)、实物机器人运动控制,实现\"仿真→实物\"的无缝衔接
高阶应用篇(7-9章)
聚焦视觉SLAM、自主导航等前沿场景,提供完整项目链路
发表于 04-27 11:24
复合机器人是通过什么导航方式?
在智能制造浪潮中,复合机器人是通过什么导航方式实现高精度、强适应性的自主作业?这一问题的答案,不仅关乎技术路径的选择,更决定了工业柔性化的未来高度。作为行业领军者,富唯智能以“激光
先楫半导体MCU具有哪些优势?
先楫半导体(HPMicro)成立于2020年6月,是一家专注于高性能嵌入式解决方案的半导体企业,总部位于上海浦东软件园。公司聚焦于研发高性能微控制器(MCU)、微处理器及配套外设芯片,
发表于 04-14 10:04
使用 Thonny 对 XRP 机器人进行编程
作者: [Aswin S Babu] 在 SLAM 博客系列[第 1 部分] ,我们讨论了什么是 SLAM(同步定位与绘图)以及机器人如何利用它进行导航。[第 2 部分] 则深入探讨了

【「具身智能机器人系统」阅读体验】2.具身智能机器人的基础模块
,一次生成深度信息。
自主机器人定位任务的本质是对机器人自身状态的估计问题,包括位置,朝向,速度等问题。
路径规划旨在找到从起点到目标区域的路径,确保路径的可行性和最优性。路径规划方法包括变分方法,
发表于 01-04 19:22
《具身智能机器人系统》第10-13章阅读心得之具身智能机器人计算挑战
阅读《具身智能机器人系统》第10-13章,我对具身智能机器人的工程实践有了全新认识。第10章从实时性角度剖析了机器人计算加速问题。机器人定位
发表于 01-04 01:15
【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型
,能够利用\"思维链\"的技术将复杂任务分解为多个子任务,以渐进的方式解决问题。这不仅提高了任务的成功率,也显著增强了系统的鲁棒性,使得机器人可以更
发表于 12-29 23:04
【「具身智能机器人系统」阅读体验】1.全书概览与第一章学习
简单的具身智能机器人的应用案例。具体目录如下:
第一章学习
具身智能机器人是指能够在无人工干预下自主执行任务的机器人。相较于传统非具身智能机器
发表于 12-27 14:50
【「具身智能机器人系统」阅读体验】+数据在具身人工智能中的价值
重大数据瓶颈的严重阻碍。与主要由用户生成的输入组成且相对容易收集和汇总的 Internet 数据不同,EAI 的数据涉及机器人与其动态环境之间的复杂交互。这一根本差异意味着,虽然可以从跨数字平台的用户
发表于 12-24 00:33
【「具身智能机器人系统」阅读体验】+初品的体验
《具身智能机器人系统》 一书由甘一鸣、俞波、万梓燊、刘少山老师共同编写,其封面如图1所示。
本书共由5部分组成,其结构和内容如图2所示。
该书可作为高校和科研机构的教材,
发表于 12-20 19:17





 工商网监
工商网监
评论